PARTE DE BRAZO DE UN ROBOT ASI COMO UN ROBOT INDUSTRIAL PROVISTO DE TAL PARTE DE BRAZO.
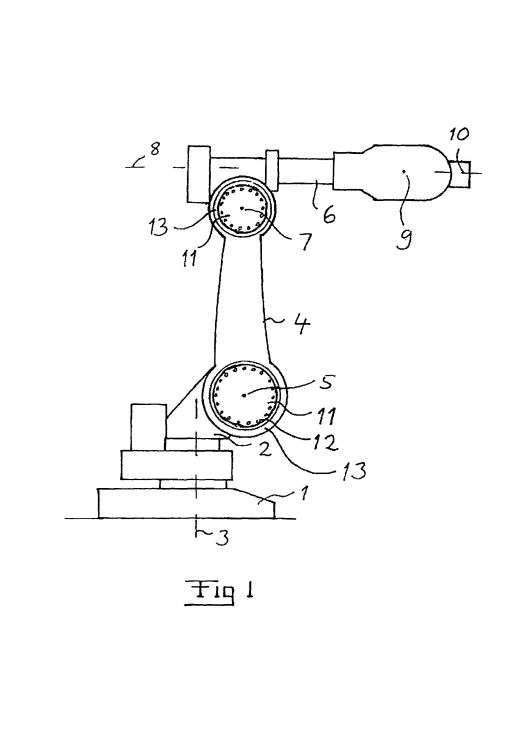
Una parte de brazo (204) de un manipulador de un robot industrial que tiene en cada uno de sus extremos unos medios para conectar la parte de brazo a un engranaje (216,
217) y medios para reforzar la región extrema de la parte de brazo, en la que en al menos uno de dichos extremos de la parte de brazo, al menos una parte de dichos medios de conexión (212, 220) está localizada más próxima a la periferia de la parte de brazo que dichos medios de refuerzo (221) rodeando al mismo tiempo al menos parcialmente los medios de refuerzo como se ve en la dirección del eje de rotación de dicho engranaje, en el que dichos medios de conexión comprenden taladros pasantes dispuestos en una porción de brazo plana para conectar el brazo por miembros de conexión alargados, en el que al menos una parte de dichos medios de refuerzo (221) está diseñada como una estructura hueca que forma una porción hueca de la parte de brazo en al menos un extremo, y en el que al menos una abertura (223, 224) está dispuesta en la estructura hueca de dichos medios de refuerzo (221) para proporcionar acceso a dichos miembros de conexión (212) localizados más distantes del extremo de la parte de brazo con respecto a la extensión longitudinal de la parte de brazo.
Tipo: Resumen de patente/invención.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVAGEN 2,721 83 VASTERAS.
Inventor/es: MIKAELSSON, PIERRE, TORESSON,BO, FORS,MICHAEL, THULIN,MATS, HELLBERG,MAGNUS.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Octubre de 2005.
Fecha Concesión Europea: 23 de Julio de 2008.
Clasificación PCT:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Manipulación y aireación automáticas de una pila de hojas de papel, del 8 de Julio de 2020, de GRAPHIC ROBOTICS APS: Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]