PROCEDIMIENTO PARA DETERMINAR LA POSICION Y EL DESPLAZAMIENTO RELATIVO DE UN OBJETO EN EL ESPACIO.
Procedimiento para determinar la posición y el desplazamiento relativo de un objeto (1) en el espacio,
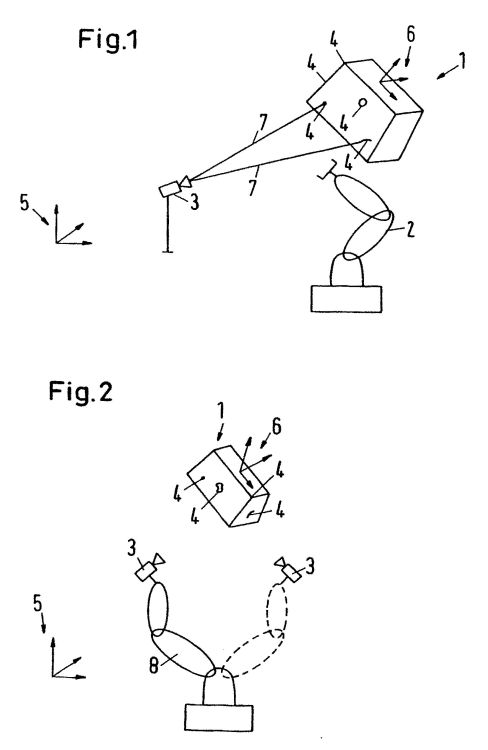
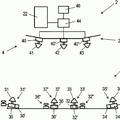
en el que se fotografían al menos tres particularidades de medición (4) del objeto (1) con un sistema fotográfico (3) óptico calibrado sobre un sistema de coordenadas tridimensional (5) y, con base en estas particularidades de medición (4), se determina en un sistema de tratamiento de fotografías la posición del objeto (1) en el sistema de coordenadas tridimensional (5), en donde se utiliza un sistema fotográfico móvil (3), caracterizado porque en cada caso se fotografían y valoran tres particularidades de medición (4) del objeto (1) en diferentes posiciones espaciales, eligiendo la posición del sistema fotográfico (3) de tal modo que para determinar la posición del objeto (1) unas particularidades de medición (4) adecuadas cubran óptimamente la región sensitiva del sistema fotográfico, siendo los ángulos intermedios de las líneas visuales (7) desde las particularidades de medición (4) al sistema fotográfico (3) superiores a 10º, y no valorándose simultáneamente más de cinco particularidades de medición (4).
Tipo: Resumen de patente/invención.
Solicitante: ISRA VISION AG.
Nacionalidad solicitante: Alemania.
Dirección: INDUSTRIESTRASSE 14,64297 DARMSTADT.
Inventor/es: WIENAND,STEPHAN, LAMBERT,GEORG.
Fecha de Publicación: .
Fecha Concesión Europea: 14 de Mayo de 2008.
Clasificación PCT:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01S5/16 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
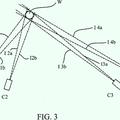 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]