DISPOSITIVO DE TRANSFERENCIA Y LINEA DE UNIDADES DE MECANIZADO PROVISTA DEL MISMO.
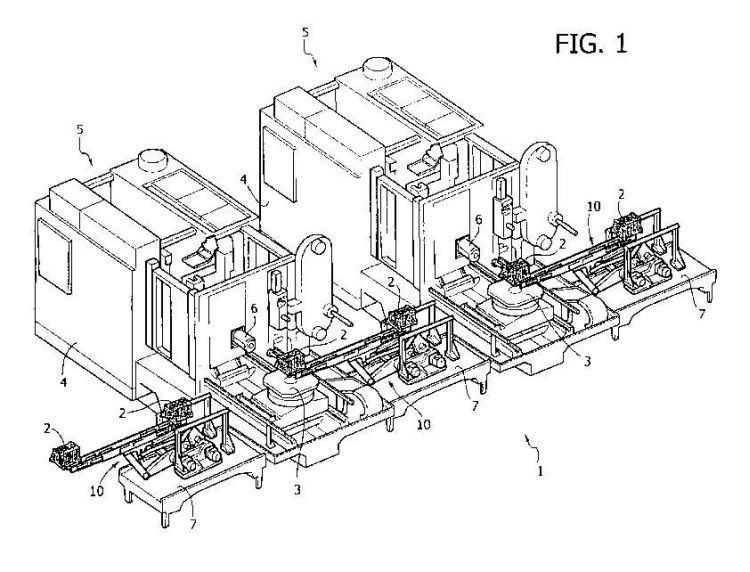
Línea de unidades de fabricación (5) para la ejecución de una secuencia de operaciones de mecanizado en un conjunto de piezas (2) que se alimentan sucesivamente en un extremo de carga (8) de la línea y avanzan por la línea hasta el extremo de descarga (9) de la línea,
en la que dicha línea comprende unos medios (10) para transferir las piezas (2) desde el extremo de carga (8) a la primera unidad (5) de la línea, desde cada unidad (5) a la siguiente, y desde la última unidad (5) de la línea al extremo de descarga (9), caracterizada porque dichos medios de transferencia comprenden una pluralidad de dispositivos de transferencia, estando situado cada uno de ellos corriente arriba y/o corriente abajo de una unidad de mecanizado a lo largo de la línea, comprendiendo cada dispositivo de transferencia: - una estructura de soporte (11); - un par de primeros brazos (L1, L2) articulados a la estructura de soporte (11) alrededor de dos ejes horizontales paralelos entre sí (A1, A2); - un par de segundos brazos (L3, L4), que presentan unos primeros extremos articulados en los primeros brazos (L1, L2) y unos segundos extremos articulados a una estructura móvil (S) alrededor de dos ejes horizontales paralelos entre sí (F3, F4); - un primer brazo auxiliar y un segundo brazo auxiliar (T1, T2), respectivamente, asociados a uno de dichos primeros brazos (L2) y a uno de dichos segundos brazos (L4) y que definen entre sí un doble paralelogramo articulado, presentando dicho primer brazo auxiliar (T1) un extremo articulado a la estructura de soporte (11) alrededor de un eje horizontal (F5) paralelo a dichos ejes (A1, A2) de articulación de dichos primeros brazos (L1, L2), y un extremo opuesto articulado a un tercer brazo auxiliar (L4) montado de manera oscilante alrededor del eje (F2) de articulación entre el primer brazo y el segundo brazo (L2, L4) al cual el sistema de doble paralelogramo articulado está asociado, presentando dicho segundo brazo auxiliar (T2) un extremo articulado a un cuarto brazo auxiliar (L6), que está montado asimismo de modo que puede girar alrededor de dicho eje de articulación (F2) entre dichos primeros y segundos brazos (L2, L5) y que está rígidamente conectado al tercer brazo auxiliar (L5) mencionado anteriormente de modo que forma un ángulo predeterminado respecto al mismo, presentando dicho brazo auxiliar (T2) su segundo extremo articulado en la estructura móvil (S) alrededor de un eje (F7) paralelo a los ejes horizontales de articulación (F3, F4) mencionados anteriormente de dichos segundos brazos (L3, L4); - un par de motores (M1, M2) que controlan el giro de los dos primeros brazos (L1, L2) alrededor de sus ejes de articulación (A1,A2) de la estructura de soporte (11) mencionada anteriormente de modo independiente entre sí; y - una unidad de control electrónico que controla los motores eléctricos (M1, M2) de todos los dispositivos de transferencia (10) de la línea de modo coordinado, para reducir los tiempos muertos que transcurren en la sustitución de la pieza mecanizada en cada unidad de fabricación de la línea.
Tipo: Resumen de patente/invención.
Solicitante: COMAU S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA RIVALTA 30,10095 GRUGLIASCO (TORINO).
Inventor/es: BRAGA,PIERO.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Junio de 2006.
Fecha Concesión Europea: 13 de Febrero de 2008.
Clasificación PCT:
- B23Q41/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 41/00 Combinaciones o asociaciónes de máquinas para trabajar el metal no destinadas a un trabajo en particular según las clases B21, B23 o B24 (B23Q 37/00, B23Q 39/00 tienen prioridad; aspectos relativos a operaciones realizadas, si las diferentes operaciones de trabajo del metal son del mismo tipo, ver la subclase para el tipo de operación, p. ej. punzonado B21D, soldadura B23K, trabajo con muela B24B; aspectos relativos a combinaciones especificadas técnicamente o diferentes operaciones de trabajo del metal B23P 23/00). › Aspectos relativos a transferencia de piezas entre máquinas (disposiciones para manipular piezas combinadas con máquinas herramientas para permitir un trabajo en cadena B23Q 7/14).
- B23Q7/00 B23Q […] › Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00).
- B25J9/10 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]