DISPOSITIVO DE ROBOT INDUSTRIAL.
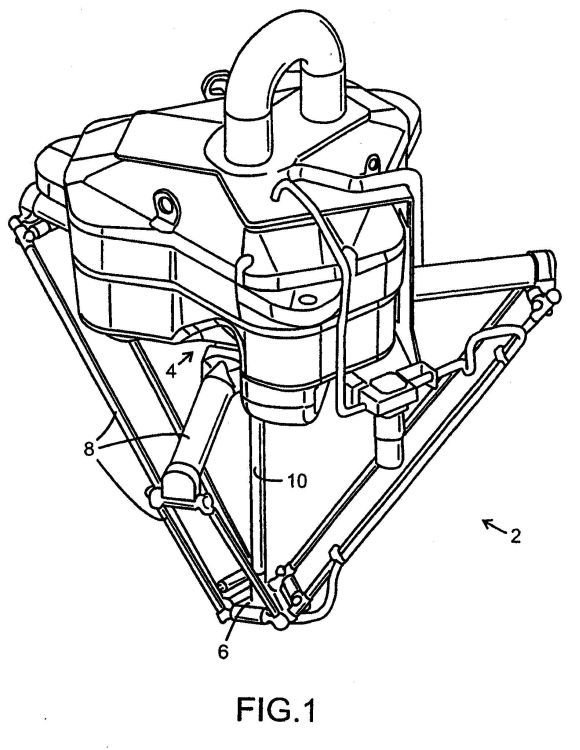
Un robot industrial según el concepto delta con un sistema de brazos (2) previsto para rotación en el espacio que incluye una sección de base (4),
una chapa móvil (6), varios puntales articulados (8) y un eje telescópico (10, 40) dispuesto entre la sección de base y la chapa móvil, en el que extremos opuestos (12, 14) de los puntales y el eje telescópico están conectados a la sección de base y a la chapa móvil, respectivamente, en el que el eje telescópico (10, 40) incluye un primer brazo telescópico (16, 46) y un segundo brazo telescópico (18, 48) que están dispuestos longitudinalmente desplazables uno con relación a otro, caracterizado porque el primer brazo telescópico (16, 46) incluye al menos dos vástagos (20, 50), un soporte interior (24, 54), al que los extremos interiores de los vástagos están unidos fijamente, y un soporte exterior (25, 55) al que los extremos exteriores de los vástagos están unidos fijamente; porque el segundo brazo telescópico (18, 48) incluye al menos dos vástagos (22, 52), un soporte interior (26, 56) al que los extremos interiores de los vástagos están unidos fijamente, y un soporte exterior (27, 57) al que los extremos exteriores de los vástagos están unidos fijamente; porque el soporte interior (24, 54) del primer brazo telescópico (16, 46) incluye ranuras (30, 60) en las que se extienden los vástagos del segundo brazo telescópico (18, 48); y porque el soporte interior (26, 56) del segundo brazo telescópico (18, 48) incluye ranuras (30, 60) en las que se extienden los vástagos (20, 50) del primer brazo telescópico (16, 46).
Tipo: Resumen de patente/invención.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: ,721 83 VASTERAS.
Inventor/es: MIKAELSSON, PIERRE, HVITTFELDT, H KAN.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Noviembre de 2007.
Clasificación PCT:
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B25J17/02 B25J […] › B25J 17/00 Uniones. › Uniones articuladas.
- B25J18/02 B25J […] › B25J 18/00 Brazos. › extensibles.
- F16B7/10 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16B DISPOSITIVOS PARA UNIR O BLOQUEAR LOS ELEMENTOS CONSTRUCTIVOS O LAS PARTES DE LAS MAQUINAS, p. ej. CLAVOS, CLAVIJAS, TUERCAS, TORNILLOS, BULONES, ANILLOS QUE FORMAN RESORTE, ABRAZADERAS, BRIDAS, GRAPAS, CUÑAS; UNIONES O ARTICULACIONES (acoplamientos para la transmisión de mecanismos de rotación F16D). › F16B 7/00 Montajes de varillas o de tubos, p. ej. de sección no circular incluyendo los montajes elásticos (armaduras de paraguas A45B 25/02; soldadura de las uniones con o sin aporte de metal B23K; uniones para vehículos en general B60D; acoplamientos para vehículos ferroviarios B61G; cuadros de bicicleta B62K; acoplamientos de ejes F16D; acoplamientos de tuberías de fluidos F16L). › Sistemas telescópicos (para andamiajes E04G 25/04; puntales telescópicos para minas E21D 15/14 - E21D 15/46; estanterías o caballetes utilizados como soportes de aparatos u objetos F16M 11/00).
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]