SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS.
Sistema adaptado a un robot para manipular objetos voluminosos,
siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado rematado en una pinza, giratoria 360º, para la manipulación de los objetos, de forma que el sistema se basa en que cada una de las hojas conformantes de la pinza se fija un brazo constituido por: un primer tramo y un segundo tramo telescópicos entre sí, de manera que el primer tramo, por su extremo libre, se fija a la correspondiente hoja de la pinza, y, al segundo tramo, por su extremo libre se une, a través de una rótula, un cuerpo de asido de los objetos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201530782.
Solicitante: PROYTECSA SECURITY, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALLEN ROSELLO,CESAR, TORRES PUEO,ROBERTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- F41H11/16 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41H BLINDAJE; TORRETAS ACORAZADAS; VEHICULOS BLINDADOS O ARMADOS; MEDIOS DE ATAQUE O DE DEFENSA, p. ej. ENMASCARAMIENTO, EN GENERAL. › F41H 11/00 Instalaciones de defensa; Mecanismos de defensa (aspectos constructivos, ver sección E, p. ej. E04H 9/04 ); Medios para limpiar o detectar minas terrestres. › Vehículos de limpieza de minas autopropulsados; Dispositivos de limpieza de minas que se unen a vehículos.
Fragmento de la descripción:
Sistema adaptado a un robot para manipular objetos voluminosos.
OBJETO DE LA INVENCIÓN. 5
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un sistema adaptado a un robot para manipular objetos voluminosos, cuyo sistema, basado en una pareja de brazos telescópicos, tiene por objeto esencial que un robot utilizado en operaciones de riesgo, tales como en la desactivación de 10 explosivos, pueda manipular objetos voluminosos que no puede manipular por medio de la pinza que porta en el extremo libre de su brazo articulado.
Así, en especial el sistema permitirá la manipulación de objetos o recipientes de forma general cilíndrica. 15
Además, el primer tramo de la pareja de brazos telescópicos de anclaje a la correspondiente hoja de la pinza presenta una inclinación según un plano vertical y horizontal que, al ser intercambiables, facilitan la manipulación de un mayor número de objetos, según que el brazo articulado del robot quede en posición horizontal o vertical. 20
CAMPO DE APLICACIÓN.
En la presente memoria se describe un sistema adaptado a un robot para manipular objetos voluminosos, siendo de especial aplicación para su adaptación en aquellos robots utilizados 25 en operaciones de riesgo, tales como en la manipulación de artefactos sospechosos y en la desactivación de explosivos.
ANTECEDENTES DE LA INVENCIÓN.
Como es conocido los robots utilizados en operaciones de riesgo, tales como la manipulación y desactivación de cargas explosivas, disponen de un brazo articulado rematado en una pinza por medio de la cual manipulan los objetos sospechosos detectados.
De esta forma, por la propia constitución de la pinza, únicamente, pueden manipular objetos de pequeño volumen o que puedan disponer de algún medio de asido, como puede ser una 35 mochila o similar.
Por ello, se ha tratado de dotar a las pinzas de ciertas características que mejoren su uso, y, así, en P201331685 se describe un "vehículo robotizado telecomandado", que como característica esencial presenta el hecho de dotar al vehículo de dos brazos articulados 40 rematados en al corresponderte pinza, permitiendo que con una primera pinza de un primer brazo pueda sujetar un objeto y con una segunda pinza del segundo brazo pueda examinar el objeto, estando ambas pinzas dotadas de un giro sinfín.
Además, una primera pinza está dotada de un sensor de presión, asociado al suministro de caudal de presión, pudiendo regular y conocer la fuerza exacta ejercida sobre el objeto a 5 manipular, en tanto que la fuerza o presión ejercida por la segunda pinza se controla por el control de la corriente eléctrica del motor que la activa.
Asimismo, la primera pinza del primer brazo articulado está provista de unas articulaciones mecánicas de corto recorrido en sus extremos que asociadas a unos resortes o muelles 10 interiores de la misma serán los que soporten la presión que se ejerce sobre el objeto a manipular, al tratarse de pequeños pesos, de forma que a los citados resorte o muelles interiores se asocian unos sensores electrónicos de distancia.
En definitiva, con las pinzas de las que están dotados los robots utilizados en la 15 manipulación de artefactos sospechosos no se pueden manipular objetos voluminosos.
DESCRIPCIÓN DE LA INVENCIÓN.
Con objeto de solventar los inconvenientes citados en la presente memoria se describe un 20 sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado rematado en una pinza, giratoria 360º, de forma que a cada una de las hojas conformantes de la pinza se fija un brazo constituido por:
un primer tramo y un segundo tramo acodado telescópicos entre sí;
el primer tramo, por su extremo libre, se fija a la correspondiente hoja de la pinza, y;
al segundo tramo acodado, por su extremo libre se une, a través de una rótula, un cuerpo de asido de los objetos.
pudiendo el primer tramo, conformante del brazo telescópico, fijarse, indistintamente, a una u otra hoja de la pinza.
En una ejecución práctica de la invención, el primer tramo de cada brazo, respecto del anclaje a la correspondiente hoja de la pinza, presenta una inclinación según un plano 35 horizontal y vertical, quedando montados en posición divergente entre sí.
Así, según la hoja de la pinza de montaje del primer tramo, conformante del correspondiente brazo, el segundo tramo telescópico queda en posición prácticamente horizontal o perpendicular a la pinza, permitiendo el asido de objetos de diferente volumen. 40
Asimismo, en una ejecución práctica de la invención el primer tramo y el segundo tramo conformantes de los brazos telescópicos, presentan una sección general cuadrangular, aunque pueden presentar cualquier otra sección, tal como circular..
El cuerpo de asido de los objetos presenta una forma general rectangular de lados curvo-5 cóncavos, fijándose a la rótula de unión al brazo por la parte central de una de sus caras, en tanto que su cara opuesta libre, de asido de los objetos, presenta una superficie general curvo-cóncava.
El cuerpo de asido de los objetos se posiciona, por gravedad, en posición de asido de los objetos. 10
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y no limitativa, se representan los detalles más característicos de la invención. 15
BREVE DESCRIPCIÓN DE LOS DISEÑOS.
Figura 1. Muestra una vista en alzado lateral de un robot al que se ha adaptado el sistema basado en una pinza para la manipulación de objetos voluminosos, pudiendo observar como 20 el segundo tramo telescópico queda en posición, prácticamente, horizontal a la pinza.
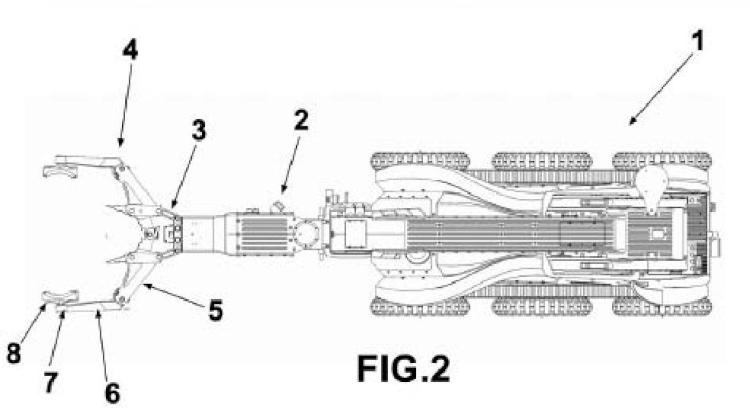
Figura 2. Muestra una vista en planta del robot de la figura anterior, al que se ha adaptado el sistema basado en una pareja de brazos para la manipulación de objetos voluminosos, pudiendo observar como la pinza del robot se encuentra en su posición de "abierta". 25
Figura 3. Muestra una vista frontal de la figura 1
Figura 4. Muestra una vista en alzado lateral de un robot al que se ha adaptado el sistema basado en una pinza para la manipulación de objetos voluminosos, y en el cual el primer 30 tramo de los brazos se ha intercambiado de hoja de la pinza, según la representación de la figura 1, pudiendo observar como el segundo tramo telescópico queda en posición, prácticamente, perpendicular a la pinza.
Figura 5. Muestra una vista en planta de la figura anterior 35
Figura 6. Muestra una vista frontal de la figura 4.
Figura 7. Muestra una vista de la pareja de brazos acoplados a la correspondiente pinza, pudiendo observar la unión entre ambos tramos conformantes del mismo, así como los 40 cuerpos de asido unidos a ellos por una rótula.
Figura 8. Muestra una vista en planta inferior en la que se observa como los brazos se anclan a las hojas de la pinza por medio de un cuerpo en "U" que la abraza por el exterior y se anclan por una pareja de pasadores.
Figura 9. Muestra una vista en perspectiva de la unión de los brazos a las hojas de la pinza, así como la unión entre ellos y los respectivos cuerpos de asido de los objetos.
DESCRIPCIÓN DE UNA REALIZACIÓN PREFERENTE.
A la vista de las comentadas figuras y de acuerdo con la numeración adoptada podemos observar cómo, partiendo de un robot 1 de tipo convencional de los utilizados en operaciones de riesgo que disponen de un brazo articulado 2 rematado en una pinza 3, giratorio 360º, se trata de adaptar en cada una de las hojas conformantes de la pinza 3, un brazo 4 conformado por un primer tramo 5 y un segundo tramo 6 telescópicos entre sí, de 15 manera que el primer tramo 5, por su extremo libre, se fija a la correspondiente hoja de la pinza 3, y, al segundo tramo 6, por su extremo libre se une, a través de una rótula 7, un cuerpo 8 de asido de los objetos.
De esta forma, en primer lugar la longitud de los brazos 4, constituidos por un primer tramo 20 5 y un segundo tramo 6 telescópicos, se podrá regular de acuerdo al objeto a manipular.
Además, el primer tramo 5, conformante de los brazos 4, respecto del cuerpo 10 de anclaje a la correspondiente hoja de la pinza 3, presenta una inclinación según un plano horizontal y vertical, quedando montados en posición divergente entre sí. El citado cuerpo 10 de anclaje 25 se define por un cuerpo en forma de "U" que abraza la correspondiente...
Reivindicaciones:
1ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado rematado en una pinza, giratoria 360º, caracterizado por que el sistema se basa 5 en que a cada una de las hojas conformantes de la pinza (3) se fija un brazo (4) constituido por:
un primer tramo (5) y un segundo tramo (6) telescópicos entre sí;
el primer tramo (5) , por su extremo libre, se fija a la correspondiente hoja de la pinza 10 (3) , y;
al segundo tramo (6) , por su extremo libre se une, a través de una rótula (7) , un cuerpo (8) de asido de los objetos,
pudiendo el primer tramo (5) , conformante del brazo (4) telescópico, fijarse, indistintamente, 15 a una u otra hoja de la pinza (3) .
2ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, según la 1ª reivindicación, caracterizado por que el primer tramo (5) , respecto del anclaje a la correspondiente hoja de la pinza (3) , presenta una inclinación según un plano horizontal y 20 vertical, quedando montados en posición divergente entre sí.
3ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, según la 1ª reivindicación, caracterizado por que según la hoja de la pinza (3) de montaje del primer tramo (5) el segundo tramo (6) telescópico queda en posición prácticamente 25 horizontal o perpendicular a la pinza (3) .
4ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, según la 1ª reivindicación, caracterizado por que el primer tramo (5) y el segundo tramo (6) telescópicos, conformantes de cada uno de los brazos (4) , presentan una sección general 30 cuadrangular.
5ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, según la 1ª reivindicación, caracterizado por que el cuerpo (8) de asido de los objetos presenta una forma general rectangular de lados curvo-cóncavos, fijándose a la rótula (7) 35 de unión al brazo (4) por la parte central de una de sus caras, en tanto que su cara opuesta libre presenta una superficie curvo-cóncava.
6ª. SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS, según las reivindicaciones 1ª y 4ª, caracterizado por que el cuerpo de asido de los objetos 40 se posiciona, por gravedad, en posición de asido de los objetos por, al menos, tres puntos de contacto.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]