Procedimiento y dispositivo para estimar la distancia más probable entre objetos.
Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil (10) a por lo menos otro objeto móvil (11),
en donde los objetos (10, 11) presentan respectivamente un dispositivo de micrófono (1), en el que
a) con los dispositivos de micrófono (1) de los objetos (10, 11) se recibe por lo menos una señal acústica (2) de por lo menos una fuente (3),
b) mediante un dispositivo de procesamiento de datos (4, 7) se examina automáticamente el desarrollo cronológico de las señales acústicas (2) respectivamente recibidas basándose en criterios predeterminados basados en por lo menos un patrón (5), en donde
c) el por lo menos un patrón (5) es un inicio (onset) de la por lo menos una señal acústica (2) o presenta un inicio de la por lo menos una señal acústica (2) y dicho inicio (5) es un tono, un ruido, un patrón de tono y/o un patrón de ruido que proceden del entorno de los objetos (10, 11), concretamente un ruido ambiental y/o un tono ambiental, y
d) en función del tiempo desde la recepción del por lo menos un patrón (5) por medio de una sincronización cronológica (6), a través de la que los objetos (10, 11) están acoplados, en particular a través de una señal de radio, y
basándose en la diferencia del tiempo de propagación medida entre los respectivamente por lo menos dos patrones (5) determinados y clasificados como probablemente iguales en la señal acústica, se determina respectivamente un valor para por lo menos una estimación de distancia (Distanciamin) entre los objetos móviles (10, 11), que representa una distancia (A) entre los por lo menos dos dispositivos de micrófono (1) como estimación de distancia mínima,
caracterizado por que
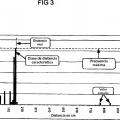
e) por medio del dispositivo de procesamiento de datos (4, 7) se efectúa un análisis estadístico mediante una serie de estimaciones de distancia mínima para la determinación de la estimación de distancia más probable de los objetos (10, 11), y el análisis estadístico comprende una evaluación de una división en clases de mediciones de distancia, en donde la frecuencia máxima de las estimaciones de distancia mínima agregadas forma la clase de distancia característica.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/055081.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: RADUSCH,ILJA, PONTOW,JENS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S15/02 G01S […] › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › que utilizan la reflexión de ondas acústicas (G01S 15/66 tiene prioridad).
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
PDF original: ES-2548333_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para estimar la distancia más probable entre objetos La presente invención se refiere a un procedimiento de acuerdo con la reivindicación 1, así como a un dispositivo con las características mencionadas en la reivindicación 7.
En numerosos ámbitos es necesario que determinados objetos, en particular aparatos móviles, puedan ser localizados tanto al aire libre como también en espacios cerrados. Bajo el término "localización" se ha de entender aquí que se determina la relación espacial de los objetos entre sí y/o la relación espacial de los objetos en relación a un sistema de referencia, tal como un espacio fijo.
Es obvio que esto también incluye formas mixtas de la localización, en las que se determina la posición de un primer aparato móvil en relación a un sistema de referencia fijo, concretamente la determinación de la distancia entre objetos, por ejemplo, de dos aparatos móviles entre sí.
Por el documento US 6941246 B1, por ejemplo, se conoce un sistema, en el que los aparatos móviles emiten señales acústicas por sí mismos, a fin de posibilitar la localización de la posición de los aparatos móviles.
Por el documento US 6792118 B1, por ejemplo, se conoce un sistema, con el que se pueden determinar diferencias de tiempo en la recepción entre dos micrófonos.
Por el documento US 2006/0077759 se conoce un sistema de identificación, en el que se usan diferentes transmisores y receptores.
Por el documento US 2006/0268795 A1 se conoce un procedimiento de determinación de posición, en el que los diferentes objetos emiten señales activamente.
En el documento US 2004/137929 A1 se describe un sistema de telecomunicación, en el que los datos son enviados y/o recibidos de manera acústica. La determinación de la posición de los aparatos es posible debido a las señales enviadas.
El documento WO 2007/001660 A2 se refiere a la localización de un aparato móvil mediante Wi-Fi, FM, AM u otras señales.
Por el documento US 2002/0167862 se conoce un procedimiento y un dispositivo para la localización acústica de acciones de entrada, que pueden representar entradas (Input) para un medio o dispositivo de entrada.
Sin embargo, con los procedimientos y dispositivos conocidos no es posible localizar disposiciones complejas de objetos de manera relativa entre ellos, sin que, por ejemplo, los objetos mismos emitan señales o se requiera una calibración por medio de un sitio de referencia conocido.
Por lo tanto, el objetivo de la presente invención consiste en proveer un procedimiento que posibilite dicha localización flexible, en particular una autolocalización.
Este objetivo se logra de acuerdo con la presente invención a través de un procedimiento con las características mencionadas en la reivindicación 1.
Mediante dispositivos de micrófono de los objetos se recibe por lo menos una señal acústica de por lo menos una fuente acústica. Con un dispositivo de procesamiento de datos, el desarrollo cronológico de la respectiva señal acústica recibida es examinado automáticamente basándose en criterios predeterminados de acuerdo con por lo menos un patrón, y en función de la recepción del por lo menos un patrón se efectúa, por medio de una sincronización de tiempo, a través de la que los objetos están acoplados, la determinación de la distancia más probable entre los objetos.
A este respecto, el por lo menos un patrón es un inicio (onset) de la por lo menos una señal acústica, o la señal acústica presenta un inicio (onset) y el inicio es un tono, un ruido, un patrón de tono y/o un patrón de ruido, que procede del entorno de los objetos, específicamente un ruido ambiental y/o un tono ambiental.
A este respecto, por medio de la diferencia en el tiempo de propagación medida entre respectivamente dos patrones determinados y clasificados como probablemente iguales se determina en la señal acústica un valor para la estimación de la distancia (Distanciamín) entre los objetos móviles que representa una distancia entre los dos dispositivos de micrófono como estimación de distancia mínima.
Por medio del dispositivo de procesamiento de datos se efectúa un análisis estadístico a través de una serie de estimaciones de distancia mínima para la determinación de la estimación de distancia más probable de los objetos,
en donde el análisis estadístico comprende una evaluación de una clasificación en clases de mediciones de distancia, y en donde la frecuencia máxima de las por lo menos una estimaciones de distancia mínima agregadas forma la clase de distancia característica.
El dispositivo de procesamiento de datos puede ser un sistema distribuido, que se encuentra dispuesto completamente en el exterior de los objetos, de tal manera que los objetos intercambian datos entre sí.
De esta manera, tan sólo basándose en la recepción de la señal acústica con un patrón es posible localizar la posición del por lo menos un objeto.
Por medio del dispositivo de procesamiento de datos se efectúa un análisis estadístico de la por lo menos una señal acústica que llega al por lo menos un objeto para la determinación de la posición más probable del objeto y/o de la posición más probable de por lo menos dos objetos. De esta manera se pueden realizar determinaciones de posición, incluso con señales ruidosas.
De manera ventajosa, basándose en los datos cronológicos de la llegada del por lo menos un patrón y de los diferentes tiempos de duración resultantes de ello en por lo menos dos objetos, se determina automáticamente una distancia entre los por lo menos dos objetos. En principio, este procedimiento también puede ser aplicado a más de dos objetos al mismo tiempo.
Es ventajoso si el por lo menos un patrón es un inicio de la por lo menos una señal acústica, concretamente un cambio abrupto de la intensidad sonora y/o un cambio en la presión acústica después de una fase previa de silencio relativo y/o una señal generada basada en el efecto Doppler. Estos patrones tienen en común que pueden ser extraídos de una señal acústica más compleja.
Adicionalmente, es ventajoso si el examen en busca del por lo menos un patrón se efectúa basándose en una propiedad de la por lo menos una señal acústica que sea independiente de la ruta de propagación de la señal acústica. Ejemplos de tales propiedades son, por ejemplo, los puntos de anulación de una señal cronológicamente modificable. En principio, la frecuencia y la forma de onda de una señal acústica son relativamente independientes de la ruta de propagación. En la búsqueda de un patrón se debe determinar que existe un patrón de señal probablemente usable para la localización de los objetos. Para determinar las diferencias de duración, los patrones de señal deben ser agrupados según su origen. Los puntos de anulación y/u otras propiedades se usan para agrupar los inicios encontrados. Es conocido que dos inicios encontrados muy probablemente han sido causados por la misma señal acústica, por lo que se puede estimar la distancia con ayuda de la diferencia en el tiempo de propagación hacia abajo. Se obtiene una afirmación con la siguiente forma: La distancia entre los dos micrófonos es por lo menos tan grande como la velocidad de propagación multiplicada por la diferencia en el tiempo de propagación.
Ventajosamente, el por lo menos un patrón es reconocido y/o caracterizado a través de un análisis de frecuencia, por medio de una frecuencia dominante, basado en la amplitud de la por lo menos una señal acústica, basándose en el número de puntos de anulación, una codificación de longitudes de propagación y/o la forma de la onda de la por lo menos una señal acústica. Estos parámetros son bien apropiados para determinar o caracterizar un patrón dentro de una señal acústica.
El objetivo de la invención también se logra a través de un dispositivo con las características mencionadas en la reivindicación 7.
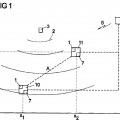
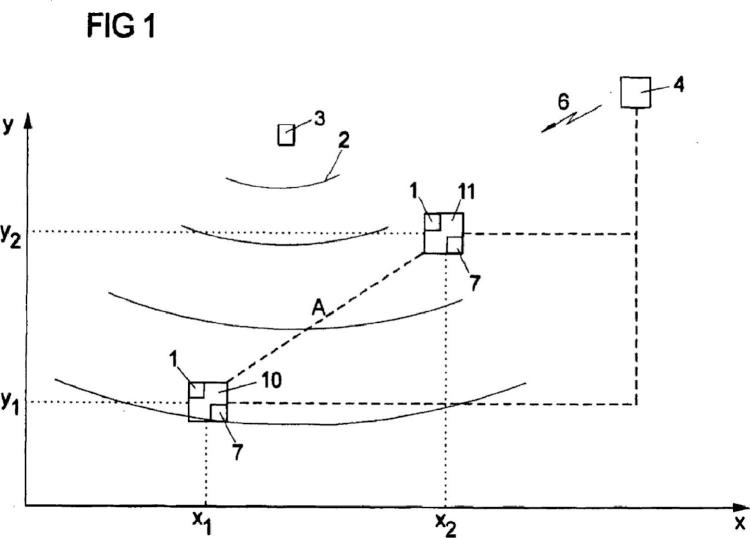
La presente invención se describe más detalladamente a continuación sobre la base de varios ejemplos de realización con referencia a los dibujos. En las figuras: 50 La Fig. 1 es una representación esquemática de la localización de dos aparatos móviles;
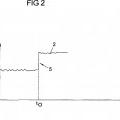
La Fig. 2 es una representación esquemática de un patrón en una señal acústica;
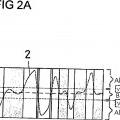
La Fig. 2A es una representación esquemática de un clasificador para una señal acústica;
La Fig. 3 es un histograma para la determinación de la clase de distancia característica;
La Fig. 4 es una representación esquemática de una aproximación de amplitudes; 60 La Fig. 5 es una representación esquemática de puntos de anulación;... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil (10) a por lo menos otro objeto móvil (11) , en donde los objetos (10, 11) presentan respectivamente un dispositivo de micrófono (1) , en el que a) con los dispositivos de micrófono (1) de los objetos (10, 11) se recibe por lo menos una señal acústica (2) de por lo menos una fuente (3) , b) mediante un dispositivo de procesamiento de datos (4, 7) se examina automáticamente el desarrollo cronológico de las señales acústicas (2) respectivamente recibidas basándose en criterios predeterminados basados en por lo menos un patrón (5) , en donde c) el por lo menos un patrón (5) es un inicio (onset) de la por lo menos una señal acústica (2) o presenta un inicio de la por lo menos una señal acústica (2) y dicho inicio (5) es un tono, un ruido, un patrón de tono y/o un patrón de ruido que proceden del entorno de los objetos (10, 11) , concretamente un ruido ambiental y/o un tono ambiental, y d) en función del tiempo desde la recepción del por lo menos un patrón (5) por medio de una sincronización cronológica (6) , a través de la que los objetos (10, 11) están acoplados, en particular a través de una señal de radio, y basándose en la diferencia del tiempo de propagación medida entre los respectivamente por lo menos dos patrones (5) determinados y clasificados como probablemente iguales en la señal acústica, se determina respectivamente un valor para por lo menos una estimación de distancia (Distanciamin) entre los objetos móviles (10, 11) , que representa una distancia (A) entre los por lo menos dos dispositivos de micrófono (1) como estimación de distancia mínima, caracterizado por que e) por medio del dispositivo de procesamiento de datos (4, 7) se efectúa un análisis estadístico mediante una serie de estimaciones de distancia mínima para la determinación de la estimación de distancia más probable de los objetos (10, 11) , y el análisis estadístico comprende una evaluación de una división en clases de mediciones de distancia, en donde la frecuencia máxima de las estimaciones de distancia mínima agregadas forma la clase de distancia característica.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que el por lo menos un objeto está configurado como aparato móvil (10, 11) , concretamente como teléfono móvil o como ordenador portátil.
3. Procedimiento de acuerdo con las reivindicaciones 1 o 2, caracterizado por que el por lo menos un patrón (5) es un inicio de la por lo menos una señal acústica (2) , concretamente un cambio súbito de la intensidad acústica y/o un cambio de la presión acústica después de una fase previa de silencio relativo y/o una señal generada basada en un efecto Doppler.
4. Procedimiento de acuerdo con por lo menos una de las reivindicaciones anteriores, caracterizado por que el examen en búsqueda del por lo menos un patrón (5) se efectúa basándose en una propiedad de la por lo menos una señal acústica (2) que es independiente de la ruta de propagación de la señal acústica (2) .
5. Procedimiento de acuerdo con por lo menos una de las reivindicaciones anteriores, caracterizado por que el por lo menos un patrón (5) es reconocido y/o caracterizado a través de un análisis de frecuencia, por medio de una frecuencia dominante basada en la amplitud de la por lo menos una señal acústica (2) , basándose en el número de puntos de anulación, una codificación de la longitud y/o la forma de onda de la por lo menos una señal acústica (2) .
6. Procedimiento de acuerdo con por lo menos una de las reivindicaciones anteriores, caracterizado por que a partir de los datos cronológicos de la llegada del por lo menos un patrón (5) y los diferentes tiempos de propagación resultantes de ello con por lo menos dos objetos (10, 11) se determina automáticamente una distancia (A) entre los dos objetos (10, 11) .
7. Dispositivo para estimar la distancia más probable de por lo menos un objeto móvil (10) a por lo menos otro objeto móvil (11) , en donde los objetos (10) presentan respectivamente un dispositivo de micrófono (1) , con el que se puede recibir por lo menos una señal acústica (2) de por lo menos una fuente acústica (3) , con un dispositivo de procesamiento de datos (4, 7) para examinar automáticamente el desarrollo cronológico de las señales acústicas (2) respectivamente recibidas basándose en criterios predeterminados para la determinación de por lo menos un patrón (5) , con un medio para la detección de por lo menos un patrón (5) de la por lo menos una señal acústica (2) con por lo menos un inicio, en donde el inicio (5) es un tono, un ruido, un patrón de tono y/o un patrón de ruido que provienen del entorno de los objetos (10, 11) , concretamente un ruido ambiental y/o un tono ambiental, y un medio para estimar la distancia entre los objetos (10, 11) en función de la recepción del por lo menos un patrón (5) , en donde los objetos (10, 11) están acoplados mediante una sincronización cronológica (6) , en particular mediante una señal de radio, en donde con ayuda de la diferencia del tiempo de propagación medido entre respectivamente por lo menos dos patrones (5) determinados y clasificados como probablemente iguales en la señal acústica se determina
respectivamente un valor para la por lo menos una estimación de distancia (Distanciamin) entre los objetos móviles (10, 11) , que representa una distancia (A) entre los dos dispositivos de micrófono (1) como estimación de distancia mínima, caracterizado por un medio para el análisis estadístico de una serie de estimaciones de distancia mínima de los objetos (10, 11) para determinar la estimación de distancia más probable de los objetos (10, 11) , en donde el análisis estadístico es una evaluación de la división en clases de mediciones de distancia, en donde la frecuencia máxima de las estimaciones de distancia mínima agregadas representa la clase de distancia característica.
10. Dispositivo de acuerdo con por lo menos una de las reivindicaciones 7 a 9, caracterizado por un medio para el análisis de frecuencia del por lo menos un patrón (5) , mediante el uso de una frecuencia dominante, de la amplitud de la por lo menos una señal acústica (2) y/o de la forma de onda de la por lo menos una señal acústica (2) . 11. Dispositivo de acuerdo con por lo menos una de las reivindicaciones 8 a 10, caracterizado por que con el dispositivo de procesamiento de datos (4, 7) , a partir de los datos cronológicos de la llegada del por lo menos un patrón (5) y los diferentes tiempos de propagación que resultan de ello con por lo menos dos objetos (10, 11) , se puede determinar automáticamente una distancia (A) entre los dos objetos (10, 11) . 12. Dispositivo de acuerdo con por lo menos una de las reivindicaciones 7 a 11, caracterizado por que el por lo menos un objeto está configurado como aparato móvil (10, 11) , concretamente como teléfono móvil o como 30 ordenador portátil. 8. Dispositivo de acuerdo con la reivindicación 7, caracterizado por un medio para la detección de por lo menos un patrón (5) de la por lo menos una señal acústica (2) con un cambio súbito de la intensidad acústica y/o un cambio de la presión acústica después de una fase previa de silencio relativo y/o de una señal generada basada en el efecto Doppler.
9. Dispositivo de acuerdo con las reivindicaciones 7 u 8, caracterizado por un medio para efectuar un examen en busca del por lo menos un patrón (5) basándose en una propiedad de la por lo menos una señal acústica (2) , en donde la propiedad es independiente de la ruta de propagación de la señal acústica (2) .
Patentes similares o relacionadas:
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales. Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende: proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Procedimiento para determinar una diferencia de distancia, del 8 de Marzo de 2017, de SKJOLD-LARSEN, HENNING: Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor , todos ellos situados bajo el agua, […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]
PROCEDIMIENTO PARA MARCAR UN OBJETIVO QUE EMITE SONIDO, del 2 de Diciembre de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos […]