Detector de posición.
Un detector de posición para detectar un desplazamiento de un objetivo,
que comprende:
- un sensor de posición (24, 25) que genera dos señales que varían de manera sinusoidal en un paso de longitud de onda λ con respecto al desplazamiento y tienen fases desplazadas una de la otra 90 grados;
- una memoria de desfase (30, 31) que almacena valores de desfase (CO, SO) respecto a las dos señales generadas desde el sensor de posición (24, 25);
- una calculadora de eliminación del desfase (8, 9) que elimina los valores de desfase (CO, SO) almacenados en la memoria de desfase (30, 31) de las dos señales respectivas generadas desde el sensor de posición (24, 25);
- una calculadora de interpolación (17) que convierte las dos señales después de la eliminación del desfase dentro de los datos de posición (IP);
- una calculadora de radio (18) que calcula la raíz cuadrada de la suma de las dos señales después de la eliminación del desfase ; y
- una calculadora de valor de desfase (19, 36, 37) que calcula los valores de desfase (CO, SO) para almacenarse en la memoria de desfase (30, 31) basados en los datos de posición (IP) y en el valor de salida (RD) desde la calculadora de radio (18) que se obtienen cuando el desplazamiento medido se cambia por un múltiplo entero de la longitud de onda λ;
en el que los valores de desfase (CO, SO) almacenados en la memoria de desfase (30, 31) se actualizan usando los valores de desfase obtenidos en la calculadora de valor de desfase (19, 36, 37), caracterizado porque la calculadora de valor de desfase (19, 36, 37) calcula los valores de desfase basados en un componente que tiene longitud de onda λ y un componente que tiene longitud de onda λ/3 que se obtienen realizando un análisis de Fourier con respecto a un cambio en el valor de salida (RD) de la calculadora de radio (18).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08004718.
Solicitante: OKUMA CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 5-25-1 Shimo-oguchi Oguchi-cho Niwa-gun Aichi JAPON.
Inventor/es: HAYASHI,YASUKAZU.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/244 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
- G01D5/245 G01D 5/00 […] › utilizando un número variable de pulsos en un tren.
PDF original: ES-2544650_T3.pdf
Fragmento de la descripción:
Detector de posición Información de prioridad Antecedentes de la invención
1. Campo de la invención
La presente invención se refiere a un detector de posición que convierte, en información de posición, las señales de salida desde un sensor de posición que genera dos señales que varían de manera sinusoidal en un paso de longitud de onda X con respecto a un desplazamiento medido y tienen fases desplazadas una de la otra 90 grados.
2. Descripción de la técnica relacionada
En un eje de rotación de una mesa giratoria o similar de una herramienta mecánica, se empleó previamente un esquema de accionamiento conseguido combinando un engranaje de reducción tal como un engranaje helicoidal con un servomotor. Sin embargo, los esquemas de accionamiento que usan engranajes de reducción son desventajosos en que la degradación de la precisión ocurre debido a la holgura, y a que el aumento de la velocidad rotativa se limita. Por consiguiente, en los años recientes, se ha empleado en el eje de rotación un esquema de accionamiento de motor directo conseguido incorporando un motor incorporado para facilitar la consecución de la alta precisión y de la alta velocidad.
En una mesa giratoria o similar de una herramienta mecánica, los detectores de posición de alta precisión se emplean convencionalmente para proveer retroalimentación al realizar el control de posición. Para aumentar la precisión de la detección de la posición, estos detectores de posición se configuran usando un sensor de posición que genera dos señales que varían de manera sinusoidal en un paso pequeño con respecto a un desplazamiento medido y tienen fases desplazadas una de la otra 90 grados. Tal sensor de posición se usa porque, incluso cuando es pobre la precisión de la resolución (en lo sucesivo referida como precisión de la interpolación) dentro del paso obtenido realizando el procesamiento de la interpolación con respecto a las dos señales, mientras que el paso es pequeño, el radio por el que la precisión de la interpolación influye en la precisión de la detección de la posición real permanece pequeña.
Sin embargo, en este tipo de detector de posición, cuando la rotación sobre el eje se realiza a una alta velocidad, la frecuencia de las señales de salida se hace excesivamente alta. Por esta razón, no ha habido disponible un detector de posición de este tipo que puede usarse a altas velocidades rotativas. Por consiguiente, los ejes de rotación accionados por el esquema de accionamiento de motor directo que facilita la rotación a alta velocidad se sometieron a restricciones en la realización a alta velocidad por los detectores de posición disponibles.
Ante estos antecedentes, ha habido una necesidad de detectores de posición capaces de mejorar la precisión de la Interpolación incluso cuando se usa un sensor de posición que genera señales de salida que tienen pasos largos en respuesta a un desplazamiento medido. Detectores de posición de este tipo se divulgan en los documentos JP 4- 136715 A, JP 2003-14440 A, JP 2005-156348 A, y similar.
El documento DE 101 63 504 A1 divulga un procedimiento para determinar interactivamente valores de corrección de errores. El procedimiento comprende medir curvas del coseno y del seno provistas por los sensores de posición de un detector de posición para cada periodo de señal y de una estimación de errores de desfase, amplitud y fase, o de valores proporcionales a ellos, a partir del análisis de Fourier de los valores medidos. Los coeficientes de Fourier para la oscilación fundamental y el primer armónico se determinan usando un valor del radio obtenido a partir de las curvas del coseno y del seno, en las que los errores de desfase se determinan a partir de la oscilación fundamental y los errores de amplitud y de fase se determinan a partir del primer armónico. El análisis de Fourier interactivo se lleva a cabo hasta que se obtienen los valores de corrección aproximadamente exactos. Además, se realiza una interpolación para obtener la información de posición entre dos valores medidos.
Sumario de la invención
De acuerdo con la presente invención, los componentes que degradan la precisión de la interpolación tales como una diferencia de desfase, de fase, y una relación de amplitud se determinan cuantitativamente basados en un valor obtenido realizando un análisis de Fourier con respecto a un cambio en una cantidad correspondiente al valor del radio de un círculo de Lissajous que es una raíz cuadrada de la suma de las dos señales que varían de manera sinusoidal en un paso de longitud de onda X con respecto a un desplazamiento medido y tienen fases desplazadas una de la otra 90 grados. Como resultado de realizar análisis numéricos usando una herramienta de hoja de cálculo y similar respecto al cambio en el valor del radio que ocurre bajo la presencia de los componentes que degradan la precisión de la Interpolación tales como una diferencia de desfase, de fase, y una relación de amplitud, se encontró que el cambio ocurre en una cantidad que es equivalente a o al menos aproximadamente 1/2 de la cantidad de los componentes de degradación. Además, se encontró que cuando una de las dos señales incluye un error de desfase, el valor del radio cambia en la forma de una onda del coseno en la longitud de onda X, y cuando la otra de las dos
señales incluye un error de desfase, el valor del radio cambia de manera sinusoidal en la longitud de onda X. Además, se encontró que cuando existe una diferencia de amplitud entre las dos señales, el valor del radio cambia en la forma de una onda del coseno en la longitud de onda XI2. Se encontró también que cuando una diferencia de fase existe entre las dos señales, el valor del radio cambia de manera sinusoidal en la longitud de onda XI2. Además, se encontró que cuando una de las dos señales Incluye una distorsión armónica de segundo orden, el valor del radio cambia en la forma de dos ondas del seno que tienen amplitudes y longitudes de ondas idénticas de X y X /3, respectivamente, y cuando la otra de las dos señales Incluye un componente de distorsión armónica de segundo orden, el valor del radio cambia en la forma de dos ondas del coseno que tienen amplitudes y longitudes de onda idénticas de X y 1/3, respectivamente. Es evidente que el cambio en el valor del radio ocurre cuando la variación mucho más pequeña comparada con la cantidad del cambio de las dos señales varía en el paso de longitud de onda X.
De acuerdo con la presente invención, los componentes que degradan la precisión de la Interpolación tales como una diferencia de desfase, de fase, y una amplitud de radio, se determinan cuantitativamente basados en el valor del radio que varía por cantidades pequeñas. Por consiguiente, Incluso cuando el desplazamiento medido es solo un cambio ligero de X o 1/21, la diferencia de desfase, de fase, y la relación de amplitud pueden Identificarse de manera precisa. Es posible por lo tanto determinar de manera precisa los cambios en la diferencia de desfase, de fase y en la relación de amplitud que fluctúan dependiendo de la posición, para eliminar esos componentes de degradación de la precisión, y mejorar así considerablemente la precisión de la interpolación. Como resultado, la alta precisión y la alta velocidad pueden conseguirse simultáneamente en un detector de posición.
Breve descripción de los dibujos
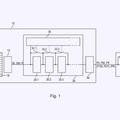
La FIG. 1 es un diagrama de bloques que muestra un detector de posición de acuerdo con una realización de la
presente invención.
La FIG. 2 es un diagrama de bloques que muestra una estructura básica de un detector de posición.
La FIG. 3 es un diagrama de bloques que muestra una operación de interpolación de un circuito de
procesamiento de señal mostrado en la FIG. 2.
Descripción de las realizaciones preferidas
Las realizaciones de la presente Invención se describen a continuación en referencia a los dibujos.
La FIG. 2 es un diagrama de bloques que muestra una estructura básica de un detector de posición. La FIG. 3 es un diagrama de bloques que muestra una operación de interpolación de un circuito de procesamiento de señal 29 en la FIG. 2. En la FIG. 2, un rotor 21, que se fija en un eje de rotación 1, se compone de un elemento magnético que tiene 36 depresiones y salientes en su periferia externa en una rotación en el paso de longitud de onda X = 10 grados. En un saliente entre los 36 salientes del rotor 21, se conecta una protuberancia 22 hecha de un elemento magnético para indicar el origen. Una placa de circuito impreso 23 montada sobre una porción no rotativa del objetivo de medida (motor) se posiclona en un lado adyacente a la superficie externa del rotor 21. Formados en la placa del circuito... [Seguir leyendo]
Reivindicaciones:
1. Un detector de posición para detectar un desplazamiento de un objetivo, que comprende:
- un sensor de posición (24, 25) que genera dos señales que varían de manera sinusoidal en un paso de longitud de onda X con respecto al desplazamiento y tienen fases desplazadas una de la otra 90 grados;
- una memoria de desfase (30, 31) que almacena valores de desfase (CO, SO) respecto a las dos señales generadas desde el sensor de posición (24, 25);
- una calculadora de eliminación del desfase (8, 9) que elimina los valores de desfase (CO, SO) almacenados en la memoria de desfase (30, 31) de las dos señales respectivas generadas desde el sensor de posición (24, 25);
- una calculadora de interpolación (17) que convierte las dos señales después de la eliminación del desfase dentro de los datos de posición (IP);
- una calculadora de radio (18) que calcula la raíz cuadrada de la suma de las dos señales después de la eliminación del desfase ; y
- una calculadora de valor de desfase (19, 36, 37) que calcula los valores de desfase (CO, SO) para almacenarse en la memoria de desfase (30, 31) basados en los datos de posición (IP) y en el valor de salida (RD) desde la calculadora de radio (18) que se obtienen cuando el desplazamiento medido se cambia por un múltiplo entero de la longitud de onda X\
en el que los valores de desfase (CO, SO) almacenados en la memoria de desfase (30, 31) se actualizan usando los valores de desfase obtenidos en la calculadora de valor de desfase (19, 36, 37), caracterizado porque la calculadora de valor de desfase (19, 36, 37) calcula los valores de desfase basados en un componente que tiene longitud de onda X y un componente que tiene longitud de onda XI3 que se obtienen realizando un análisis de Fourier con respecto a un cambio en el valor de salida (RD) de la calculadora de radio (18).
2. Un detector de posición para detectar un desplazamiento de un objetivo, que comprende:
- un sensor de posición (24, 25) que genera dos señales que varían de manera sinusoidal en un paso de longitud de onda X con respecto al desplazamiento y tienen fases desplazadas una de la otra 90 grados;
- una memoria de valor de corrección de la relación de amplitud (33) que almacena un valor de corrección de la relación de amplitud (BJ) respecto a las dos señales generadas desde el sensor de posición (24, 25);
- una calculadora de corrección de la relación de amplitud (16) que corrige una relación de amplitud de las dos señales generadas desde el sensor de posición de acuerdo con el valor de corrección de la relación de amplitud (BJ) almacenado en la memoria del valor de corrección de la relación de amplitud (33);
- una calculadora de interpolación (17) que convierte las dos señales después de la corrección de la relación de amplitud dentro de los datos de posición (IP);
- una calculadora de radio (18) que calcula la raíz cuadrada de la suma de las dos señales después de la corrección de la relación de amplitud; y
- una calculadora de valor de corrección de la relación de amplitud (19, 34, 39) que calcula un valor de corrección de la relación de amplitud (BJ) para almacenarse en la memoria de valor de corrección de la relación de amplitud (33) basada en los datos de posición (IP) y en un valor de salida (RD) desde la calculadora de radio (18) que se obtienen cuando el desplazamiento medido se cambia por un múltiplo entero de la longitud de onda XI2\
en el que el valor de corrección de la relación de amplitud (BJ) almacenado en la memoria del valor de corrección de la relación de amplitud (33) se actualiza usando el valor de corrección de la relación de amplitud obtenido en la calculadora de valor de corrección de la relación de amplitud (19, 34, 39), caracterizado porque la calculadora de valor de corrección de la relación de amplitud (19, 34, 39) calcula el valor de corrección de la relación de amplitud (BJ) basado en un componente que tiene longitud de onda XI2 obtenida realizando un análisis de Fourier con respecto a un cambio en el valor de salida (RD) de la calculadora de radio (18) con respecto a los datos de posición y a un componente que tiene un radio medio (RDA).
3. Un detector de posición para detectar un desplazamiento de un objetivo, que comprende:
- un sensor de posición (24, 25) que genera dos señales que varían de manera sinusoidal en un paso de longitud de onda X con respecto al desplazamiento y tienen fases desplazadas una de la otra 90 grados;
- una memoria de valor de corrección de diferencia de fase (32) que almacena un valor de corrección de la diferencia de fase (PJ) respecto a las dos señales generadas desde el sensor de posición (24, 25);
- una calculadora de corrección de diferencia de fase (14, 15) que corrige una diferencia de fase de las dos señales generadas desde el sensor de posición de acuerdo con el valor de corrección de la diferencia de
fase (PJ) almacenado en la memoria de valor de corrección de la diferencia de fase (32);
- una calculadora de interpolación (17) que convierte las dos señales después de la corrección de la diferencia de fase dentro de los datos de posición (IP);
- una calculadora de radio (18) que calcula la raíz cuadrada de la suma de las dos señales después de la corrección de la diferencia de fase; y
- una calculadora de valor de corrección de la diferencia de fase (19, 35, 38) que calcula un valor de
corrección de la diferencia de fase (PJ) para almacenarse en la memoria de valor de corrección de la diferencia de fase (32) basada en los datos de posición (IP) y en un valor de salida (RD) desde la calculadora de radio (18) que se obtienen cuando el desplazamiento medido se cambia por un múltiplo entero de longitud de onda }J2\
en el que el valor de corrección de la diferencia de fase (PJ) almacenado en la memoria de valor de corrección de la diferencia de fase (32) se actualiza usando el valor de corrección de la diferencia de fase obtenido en la calculadora de valor de corrección de la diferencia de fase (19, 25, 32) caracterizado porque la calculadora de valor de corrección de la diferencia de fase (19, 35, 38) calcula el valor de corrección de la diferencia de fase (PJ) basado en un componente que tiene longitud de onda X/2 obtenida realizando un análisis de Fouriercon respecto a un cambio
en el valor de salida (RD) de la calculadora de radio (18) con respecto a los datos de posición y a un componente que tiene un radio medio (RDA).
Patentes similares o relacionadas:
Sistema y proceso para determinar desplazamientos de instrumentos de medición, del 10 de Junio de 2020, de PSC Engineering S.r.l: Sistema para determinar y restar desplazamientos (δ) de instrumentos de medición e instrumentaciones para aplicaciones navales para estabilizar […]
Método de estimación de fase y aparato para el mismo, del 20 de Mayo de 2020, de Novanta Corporation: Aparato para estimación de fase mediante el procesamiento de señales de sensor desde un conjunto de sensores , transportando las señales de sensor colectivamente una fase […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Método de comprobación para un dispositivo optoelectrónico de medida, y dispositivo, del 16 de Octubre de 2019, de FAGOR AUTOMATION S.COOP: Método de comprobación para un dispositivo optoelectrónico de medida, comprendiendo el dispositivo una regla graduada con una pluralidad de marcas distribuidas […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]