Dispositivo para la medida sin contacto en ejes rotativos de sus tres coordenadas independientes de desplazamiento y tres ángulos de giro independientes.
La presente invención se refiere a un dispositivo para la medida de posición,
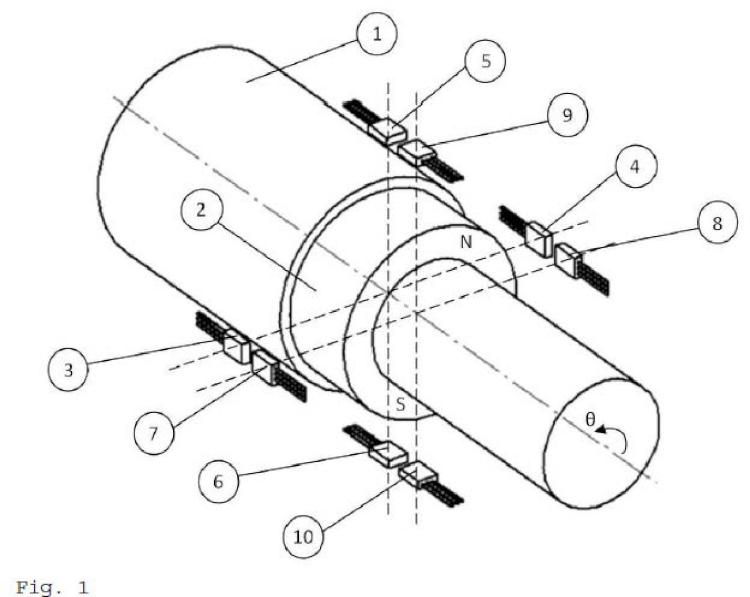
rotación y cabeceo y guiñada de un eje rotativo (1) caracterizado por disponer de al menos un imán permanente (2) con imanación en dirección diametral sólidamente unido a dicho eje rotativo (1) y por disponer además de un primer conjunto de al menos cuatro sensores de campo magnético uniaxiales (3), (4), (5) y (6) y un segundo conjunto de al menos dos sensores (7) y (9), estando cada uno de dichos sensores (3), (4), (5), (6), (7) y (9) fijos y separados cada uno a una cierta distancia del al menos un imán permanente (2), estando sus ejes sensibles orientados radialmente y el primer conjunto caracterizado además por disponerse los sensores por parejas en dos ejes radiales, caracterizados además los dos conjuntos por estar desplazados axialmente una cierta distancia fija uno de otro.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430110.
Solicitante: UNIVERSIDAD CARLOS III DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: PEREZ DIAZ,JOSE LUIS, DÍEZ JIMENEZ,Efrén, VALIENTE BLANCO,Ignacio, ÁLVAREZ VALENZUELA,Marco Antonio, SÁNCHEZ GARCÍA-CASARRUBIOS,Juan, CRISTACHE,Cristian, MARTÍNEZ ROJAS,Juan Antonio, MARTÍNEZ SARMIENTO,Sofía, DE LA LASTRA BLANCO,María, LIANES GARCÍA,Cristina.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
Fragmento de la descripción:
Dispositivo para la medida sin contacto en ejes rotativos de sus tres coordenadas independientes de desplazamiento y tres ángulos de giro independientes.
Sector de la técnica
La presente invención se refiere a un dispositivo para medir el desplazamiento en las tres coordenadas independientes del espacio así como el giro en torno a tres ángulos independientes de un eje rotativo. Es de aplicación a ejes rotativos soportados por cojinetes 10 con una cierta elasticidad u holgura de movimiento -como pueden ser los cojinetes hidrodinámicos, los magnéticos o los magnéticos superconductores- en cuyo caso el eje puede ser considerado relativamente rígido y el dispositivo proporciona las 6 coordenadas generalizadas (desplazamiento y ángulos) que definen el movimiento del eje como sólido rígido. 15
También es de aplicación a ejes rotativos que disponiendo de cojinetes de comportamiento relativamente rígido sufran flexión u otro tipo de deformación, en cuyo caso el dispositivo proporcionará las tres componentes del vector amplitud de vibración así como los dos ángulos que definen en cada momento la tangente al eje vibrante en el punto en el que esté instalado el 20 dispositivo y el tercer ángulo que define el propio giro en torno de su eje. En caso de que el eje se deforme o flecte, el dispositivo proporciona, mediante la aportación de los valores de las tangentes al eje, una información sobre el estado vibracional del eje completo -permitiendo deducir la posición de los máximos de deflexión o la aparición de modos de vibración-, algo que no pueden aportar los dispositivos que sólo miden amplitud de vibración en un punto -sin poder 25 determinar dónde se produce y cuál es la magnitud de la amplitud máxima de vibración-.
El dispositivo se caracteriza por disponer de un imán permanente o un conjunto de ellos fijos al eje rotativo de forma que la imanación sea esencialmente transversal al eje rotativo y un conjunto de al menos 6 sensores de campo magnético uniaxiales dispuestos alrededor del eje 30 rotativo a una cierta distancia sin tocar el eje y por disponer de un módulo electrónico de acondicionamiento y procesado de la señal proviniente de los sensores de campo magnético. En una realización preferente de la presente invención los sensores de campo magnético pueden ser de tipo Hall.
Como instrumento de medida de desplazamiento en 3 dimensiones y 3 ángulos girados, la presente invención puede emplearse en ejes rígidos rotativos flotantes, por ejemplo sobre cojinetes magnéticos o también por ejemplo sobre cojinetes hidrodinámicos, sea cual sea el tipo de mecanismo en el que estén incorporados, o ejes montados con ciertos grados de libertad como por ejemplo en giróscopos o similares. 40
Como instrumento de caracterización de vibraciones puede emplearse en ejes rotativos sometidos a flexión o deformación -bien en su funcionamiento normal o como consecuencia de una anomalía, en cuyo caso el dispositivo es capaz de detectar dicha anomalía.
Estado de la técnica
Existen en la técnica actual un número de sensores de campo magnético, como, por ejemplo, los de tipo Hall, los magnetorresistivos y los basados en magnetorresistencia gigante o los más sensibles de interferencia cuántica superconductora conocidos como SQUID. 50 Cualquiera de ellos puede ser empleado para medir la componente del vector inducción magnética o campo magnético en una dirección.
Existen en la técnica numerosas invenciones que emplean algunos de estos sensores para medir algunas magnitudes mecánicas. Así, por ejemplo, en la patente US 4, 825, 157 se emplean 4 sensores Hall para determinar el movimiento en un plano de un joystick, empleando una bobina excitada en corriente alterna como fuente y filtrando mediante condensadores la señal que pudiera causar un campo magnético constante. 5
En la patente US 5, 818, 223 se emplea un sensor Hall y un imán permanente con imanación en dirección diametral para determinar el ángulo de rotación de un eje rígido y rígidamente soportado por cojinetes convencionales.
En el documento US 6, 396, 259 B1 se describe también un dispositivo para medir un ángulo de rotación empleando un imán permanente con imanación en dirección diametral y un sensor de campo magnético.
En Sensors, Proceedings of IEEE (volumen 2) en 2002 Schott describe un sensor de 15 posición en el plano -ejes X e Y- que emplea un imán permanente con imanación perpendicular al plano y dos sensores Hall biaxiales.
Demierre y otros describen, en Sensors and Actuators A 116 (2004) 39-44, un dispositivo CMOS que integra dos pares de sensores Hall en dos direcciones de un plano para 20 poder medir el ángulo de giro de un imán permanente de imanación paralela al plano (y transversal al eje de giro) .
De igual manera un ángulo de giro de un eje es medido en el sistema descrito en el documento US 6, 707, 293 B2 empleando un imán permanente y una combinación de un sensor 25 de tipo Hall y un sensor magnetorresistivo. La combinación de los dos tipos se emplea para determinar el sentido de giro además de la magnitud del ángulo.
Paulides describe en IEEE Trans. On Magnetics vol. 42, nº 10 (2006) 3294-3296 la señal producida por un sensor Hall al girar en torno de su eje un imán anular con imanación en 30 dirección diametral.
Fontana describe en el documento "Novel Magnetic Sensing Approach with Improved Linearity" publicado en Sensors 2013, 13, 7618-7632, la mejora de la medida del ángulo girado por un eje mediante el empleo de un imán con imanación en dirección diametral y un conjunto 35 de hasta tres sensores Hall excentricos.
Sheng-Ming Yang y Chun-Cheng Lin emplean imanes permanentes con imanación axial para medir, mediante un conjunto de cuatro sensores Hall, desplazamientos del eje exclusivamente en la dirección axial como está descrito en el documento "Performance of a 40 Single-Axis Controlled Magnetic Bearing for Axial Blood Pump" Industr y Applications Conference (2007) 42 IAS Annual Meeting. Por otro lado, Sheng-Ming Yang y Chien-Lung Huang en IEEE Sensors Journal, vol. 9, nº 12 (2009) 1872-1878, emplean un conjunto de seis sensores Hall para determinar los deplazamientos tanto radiales como axiales de un imán con imanación axial solidario con un eje rotativo soportado en cojinetes magnéticos pasivos para la 45 dirección radial y activos para la axial. Dada la disposición del imán permanente con su imanación orientada axialmente (alineada con el eje) la señal que obtiene es esencialmente continua. El citado conjunto de sensores, debido a la simetría de rotación del imán permanente, no es capaz de medir el giro del eje.
Bretschneider y otros describen en "Design of multi-dimensional magnetic position systems based on HallinOne technology" (2010) IEEE 422-426 un método para determinar las seis coordenadas que describen la posición y el ángulo de orientación de un imán permanente mediante la señal obtenida en un único circuito integrado que incorpora cinco sensores Hall triaxiales -con un total de quince medidas de componentes de campo magnético en el mismo chip -con la evidente complejidad y coste asociados-. Este último dispositivo, al medir todas las componentes en un punto o una región tan pequeña como el tamaño del propio chip, es muy vulnerable a la presencia de polución magnética u otras fuentes de campos magnéticos. 5
Descripción
El dispositivo de la presente invención se caracteriza por disponer de un imán permanente o un conjunto de ellos fijos al eje rotativo de forma que la imanación sea esencialmente transversal 10 al eje rotativo y un conjunto de al menos seis sensores de campo magnético uniaxiales dispuestos alrededor del eje rotativo cada uno de ellos a una cierta distancia sin tocar el eje y con su eje sensible orientado radialmente y se caracteriza además por disponer de un módulo electrónico de acondicionamiento y procesado algebraico de la señal electrónica en corriente alterna proviniente de los sensores de campo magnético. 15
En una realización preferente de la presente invención los sensores de campo magnético pueden ser de tipo Hall y el procesado algebraico de la señal podría ser tanto analógico como digital.
La ventaja de la presente invención es el bajo costo de los componentes empleados, además de la posibilidad de determinar sin contacto y simultáneamente los seis grados de libertad de movimiento del eje en el punto donde se encuentra el citado imán permanente: desplazamientos radiales X e Y y axial Z y rotación , cabeceo y guiñada ß. Además la medida es instantánea y no requiere algoritmos complejos. Las señales obtenidas son 25 proporcionales al desplazamiento obtenido y se obtienen mediante...
Reivindicaciones:
1. Un dispositivo para la medida de posición, rotación y cabeceo y guiñada de un eje rotativo (1) caracterizado por disponer de al menos un imán permanente (2) con imanación en dirección diametral sólidamente unido a dicho eje rotativo (1) y por disponer 5 además de un primer conjunto de al menos cuatro sensores de campo magnético uniaxiales (3) , (4) , (5) y (6) y un segundo conjunto de al menos dos sensores (7) y (9) , estando cada uno de dichos sensores (3) , (4) , (5) , (6) , (7) y (9) fijos y separados cada uno a una cierta distancia del imán permanente (2) , estando sus ejes sensibles orientados radialmente y el primer conjunto caracterizado además por disponerse los 10 sensores por parejas en dos ejes radiales, caracterizados además los dos conjuntos por estar desplazados axialmente una cierta distancia fija uno de otro.
2. El dispositivo según la reivindicación 1 caracterizado porque dicho primer conjunto de sensores (3) , (4) , (5) y (6) se dispone por parejas en dos ejes radiales perpendiculares 15 entre sí.
3. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque los sensores que forman dicho primer conjunto de sensores se encuentran a la misma distancia de dicho imán permanente (2) . 20
4. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque los sensores que forman dicho segundo conjunto de sensores se encuentran a la misma distancia de dicho imán permanente (2) .
5. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque todos los sensores se encuentran a la misma distancia de dicho imán permanente (2) .
6. El dispositivo según cualquiera de las reivindicaciones 1 a 4, caracterizado porque todos los sensores del primer conjunto de sensores se encuentran a una misma primera 30 distancia del imán permanente (2) y todos los sensores del segundo conjunto de sensores se encuentran a una misma segunda distancia del imán permanente (2) , en donde dicha primera distancia es distinta de dicha segunda distancia.
7. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque 35 dicho segundo conjunto de sensores comprende cuatro sensores (7) , (8) , (9) y (10) .
8. El dispositivo según la reivindicación 7 caracterizado porque dichos sensores (7) , (8) , (9) y (10) se disponen por parejas en dos ejes radiales.
9. El dispositivo según la reivindicación 8 caracterizado porque dichos ejes radiales son perpendiculares entre sí.
10. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque dicho primer conjunto de sensores (3) , (4) , (5) y (6) y y dicho segundo conjunto de 45 sensores (7) , (8) , (9) y (10) están situados en circunferencias paralelas de igual diámetro.
11. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque dicho primer conjunto de sensores y dicho segundo conjunto de sensores se sitúan en ejes paralelos entre sí. 50
12. El dispositivo según cualquiera de las reivindicaciones anteriores caracterizado porque comprende de un conjunto (11) de filtros analógicos paso bajo antiestroboscópicos, un conjunto (12) de módulos de álgebra de las señales y un módulo medidor de fase (13) .
13. El dispositivo de la reivindicación anterior caracterizado porque dispone de ajustes de 5 ganancia independientes para cada una de las señales empleadas.
Patentes similares o relacionadas:
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
SISTEMA SENSOR DE POSICION, del 22 de Enero de 2020, de PIHER SENSORS & CONTROLS, S.A: 1. Sistema sensor de posición de tipo inductivo para motores, comprendiendo el sistema sensor un sensor que comprende una bobina inductora y una bobina pasiva, […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple, y método para detectar los mismos, del 19 de Octubre de 2016, de Oriental Motor Co., Ltd: Un dispositivo para calcular un ángulo de rotación absoluto de rotación múltiple, que comprende: un mecanismo de transmisión adaptado para transmitir una revolución […]
Dispositivo para detectar el ángulo de rotación de un eje de dirección, del 10 de Agosto de 2016, de KAYABA INDUSTRY CO., LTD.: Dispositivo de deteccion del angulo de rotacion del eje de direccion que detecta un angulo de rotacion de un eje de direccion que gira al accionar […]
 Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]
Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]