Sistema de medición tridimensional y método de re-escalado que utilizan un GPS de interior.
Un sistema de medición tridimensional para captar una distancia entre dos posiciones que utiliza un sistema de posicionamiento global de interior (IGPS),
que comprende:
el IGPS que incluye una pluralidad de transmisores ópticos (100, 500a, 500b) configurados para radiar haces de abanico (120, 130) y que también incluye un receptor (600) configurado para detectar los haces de abanico radiados (120, 130), en que el IGPS está configurado para detectar una posición del receptor (600) como una coordenada tridimensional utilizando los transmisores ópticos (100, 500a, 500b).
caracterizado porque comprende además
una barra de re-escalado (200) que tiene escalas lineales en la misma;
un codificador lineal (300) configurado para medir una longitud absoluta entre dos puntos en que el codificador lineal (300) se mueve en la barra de re-escalado (200); y
una barra de vector (400) provista del receptor (600) y que tiene un extremo unido al codificador lineal (300), en que la barra de vector está configurada para captar coordenadas de los dos puntos entre los cuales se mueve la barra de vector (400) utilizando el receptor (600), configurada para medir la longitud relativa entre las coordenadas captadas,
en el que el sistema de medición tridimensional está configurado para aplicar una relación entre la longitud absoluta y la longitud relativa al re-escalar la distancia real entre dos posiciones medidas por la barra de vector (400) para obtener de esta manera una distancia real precisa entre las dos posiciones.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/KR2007/004659.
Solicitante: SAMSUNG HEAVY IND. CO. LTD.
Nacionalidad solicitante: República de Corea.
Dirección: 530, JANGPYEONG-RI, SINHYEON-EUP, GEOJE-SI GYEONGSANGNAM-DO 656-710 REPUBLICA DE COREA.
Inventor/es: PARK, YOUNG-JUN, CHUNG,SEONG-YOUB, KIM,SUNG-HAN, SONG,SE-HWAN, KIM,JAE-HOON, PARK,JIN-HYUNG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C3/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Medida de distancias en línea de vista; Telémetros ópticos (cintas, cadenas o ruedas para la medida de la longitud G01B 3/00; sistemas de triangulación activos, p. ej. que utilizan la transmisión y reflexión de ondas electromagnéticas que no sean ondas de radio, G01S 17/48).
PDF original: ES-2540262_T3.pdf
Fragmento de la descripción:
Campo técnico
La presente invención se refiere a un sistema de medición tridimensional que utiliza un IGPS (Sistema de Posicionamiento Global de Interior), y más particularmente, a un sistema y un método que captan una medición de la distancia exacta mediante la eliminación de un error en la medición de la distancia entre dos posiciones.
Antecedentes de la técnica
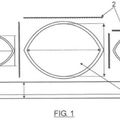
La FIG. 1 es un diagrama que muestra la configuración de un sistema de medición de la técnica anterior en tres dimensiones usando un IGPS. En referencia a la FIG. 1, el sistema de medición en tres dimensiones que utiliza un IGPS incluye una barra de escala 1, una barra de vector 2, una pluralidad de transmisores ópticos 3a y 3b, y un receptor 4.
El receptor 4 está fijado a la barra de vector 2, y un extremo de la barra de vector 2 es afilado para entrar en contacto con la barra de escala 1 en vertical, durante la medición. El receptor 4 recibe las ondas eléctricas y los rayos láser radiados desde al menos dos transmisores ópticos 3a y 3b. En este momento, se realiza la medición moviendo el receptor 4 entre dos posiciones conocidas. En el sistema de medición tridimensional, las coordenadas de las posiciones medidas se convierten en una distancia entre las dos posiciones, para de esta manera medir la distancia entre las dos posiciones.
En el sistema de medición tridimensional anteriormente descrito que utiliza un IGPS, cuando la barra de vector 2 indica un punto en la barra de escala 1, un trabajador tiene que utilizar sus manos para indicar directamente el punto. Sin embargo, para el trabajador resulta difícil indicar el punto con precisión. Por consiguiente, un valor de medición del punto puede variar cada vez que se realiza la medición. Además, un error debido a este problema puede causar un error acumulativo, y por lo tanto, cuando se mide una distancia entre dos posiciones, la distancia medida puede acabar siendo más grande que la distancia real.
Descripción de la invención
Problema Técnico
La invención se ha realizado con el fin de resolver los problemas descritos anteriormente. Es un objeto de la invención proporcionar un sistema y método que captan una distancia exacta entre dos posiciones mediante la eliminación de un error en una medición de la distancia entre dos posiciones.
Solución Técnica
De acuerdo con un aspecto de la invención, se proporciona un sistema de medición tridimensional para captar la distancia entre dos posiciones utilizando un sistema de posicionamiento global de interior, incluyendo: el IGPS que incluye una pluralidad de transmisores ópticos que radian haces en abanico y que también incluye un receptor que detecta los haces en abanico radiados, en que el IGPS está configurado para detectar una posición del receptor como coordenada tridimensional utilizando los transmisores ópticos; una barra de re-escalado que tiene escalas lineales en la misma; un codificador lineal para medir una longitud absoluta entre dos puntos en la que el codificador lineal se mueve en la barra de re-escalado; y una barra de vector provista de un receptor y que tiene un extremo unido al codificador lineal, en que la barra de vector adquiere las coordenadas de los dos puntos entre los cuales se mueve la barra de vector utilizando el receptor, y midiendo la longitud relativa de las coordenadas adquiridas. Se aplica una relación entre la longitud absoluta y la longitud relativa para re-escalar una distancia real entre dos posiciones medidas por la barra de vector para conseguir de esta manera una distancia real precisa entre las dos posiciones.
De acuerdo con otro aspecto de la invención, se proporciona un método de re-escalado para conseguir una distancia entre dos posiciones utilizando un sistema de posicionamiento global de interior. El método puede incluir: radiar haces de abanico utilizando una pluralidad de transmisores ópticos del IGPS; detectar los haces de abanico radiados utilizando un receptor del IGPS, en que el IGPS detecta una posición del receptor como una coordenada tridimensional utilizando los transmisores ópticos; medir una longitud absoluta entre dos puntos utilizando una codificación lineal en que el codificador lineal se mueve en una barra de re-escalado que tiene escalas lineales en la misma; captar, utilizando una barra de vector, las coordenadas de los dos puntos entre los cuales se mueve la barra de vector y utilizando el receptor, y medir utilizando el vector una longitud relativa a partir de las coordenadas captadas; y aplicar una relación entre la longitud absoluta y la longitud relativa al re-escalar una distancia real entre dos posiciones medida por la barra de vector para obtener de esta forma una distancia real precisa entre las dos posiciones.
Efectos ventajosos
De acuerdo con la presente invención, incluso si una medición se realiza repetidamente con respecto a un punto indicado por la barra de vector en la barra de re-escalado, el presente método es más preciso en comparación con una técnica anterior en la que el trabajador indica directamente el punto. Por lo tanto, incluso si se mide una distancia entre las posiciones más larga que una distancia medida, no existe el caso de que se produzca un error.
Breve descripción de los dibujos
La FIG. 1 es un diagrama que muestra la configuración de un sistema de medición de la técnica anterior en tres dimensiones utiizando un IGPS;
La FIG. 2 es una vista conceptual que ilustra un caso en el que un receptor recibe rayos láser generados a partir de transmisores ópticos de acuerdo con la invención;
La FIG. 3 es un diagrama que muestra la configuración de un sistema de medición en tres dimensiones utilizando un IGPS de acuerdo con la invención; y
La FIG. 4 es un diagrama de flujo que ilustra un método de re-escalado realizado en un sistema de medición en tres dimensiones utilizando un IGPS de acuerdo con la invención.
Mejor modo de llevar a cabo la invención
La invención se describirá a continuación en detalle con referencia a los dibujos adjuntos.
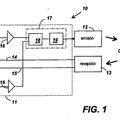
La FIG. 2 es una vista conceptual que ilustra un caso en el que un receptor recibe rayos láser generados a partir de transmisores ópticos utilizados en la presente invención.
En general, un GPS (Sistema de Posicionamiento Global) reconoce y determina una coordenada tridimensional correspondiente a la posición de un receptor GPS utilizando tres o más satélites GPS. Este concepto también se puede aplicar en interior, que es representativo de un sistema de posicionamiento global de interior (IGPS). El IGPS puede detectar la posición de un receptor como una coordenada tridimensional utilizando un transmisor que actúa como un satélite GPS y el receptor que actúa como un receptor de GPS.
En referencia a la FIG. 2, un transmisor óptico 1 irradia dos haces de abanico giratorios 12 y 13. Los haces de abanico giratorios 12 y 13 pueden ser haces de abanico láser u otros haces ópticos. Un receptor 11 recibe los haces de abanico 12 y 13 radiados por el transmisor óptico 1 para obtener la posición en relación con el transmisor óptico 1 o una coordenada tridimensional de los mismos. En este momento, dado que los haces de abanico 12 y 13 están separados entre si en un ángulo predeterminado, se puede medir la altitud del receptor 11, que recibe los haces de abanico 12 y 13.
La FIG. 3 es un diagrama que muestra la configuración de un sistema de medición en tres dimensiones utilizando un IGPS de acuerdo con la invención. En referencia a la FIG. 3, el sistema de medición tridimensional de la invención que utiliza un IGPS incluye una barra de re-escalado 2, un codificador lineal 3, una barra de vector 4, una pluralidad de transmisores ópticos 5a y 5b, y un receptor 6.
La barra de re-escalado 2 tiene escalas lineales en la misma, a través de las cuales se puede percibir una longitud entre dos puntos en la barra de re-escalado 2. El codificador lineal 3 puede corresponder en la barra de re-escalado 2 a una dirección en la que se mueve la barra de re-escalado 2, de tal manera que se puede medir una longitud precisa con una óptima precisión de la medición. Por ejemplo, la precisión de la medición del codificador lineal 3 está dentro de ,1 mm. Además, dado que un extremo inferior de la barra de vector 4 está fijado sobre el codificador lineal 3, la barra de vector 4 puede moverse conjuntamente cuando se mueve el codificador lineal 3.
Además, los transmisores ópticos 5a y 5b irradian haces de abanico láser. Aunque en la FIG. 3 sólo se muestran dos transmisores ópticos 5a y 5b, es sustancialmente preferiblemente proporcionar al menos tres transmisores ópticos.
El receptor 6, que puede incluir uno o más, está unido a un extremo superior de la barra... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de medición tridimensional para captar una distancia entre dos posiciones que utiliza un sistema de posicionamiento global de interior (IGPS), que comprende:
el IGPS que incluye una pluralidad de transmisores ópticos (1, 5a, 5b) configurados para radiar haces de abanico (12, 13) y que también incluye un receptor (6) configurado para detectar los haces de abanico radiados (12, 13), en que el IGPS está configurado para detectar una posición del receptor (6) como una coordenada tridimensional utilizando los transmisores ópticos (1, 5a, 5b).
caracterizado porque comprende además
una barra de re-escalado (2) que tiene escalas lineales en la misma;
un codificador lineal (3) configurado para medir una longitud absoluta entre dos puntos en que el codificador lineal (3) se mueve en la barra de re-escalado (2); y
una barra de vector (4) provista del receptor (6) y que tiene un extremo unido al codificador lineal (3), en que la barra de vector está configurada para captar coordenadas de los dos puntos entre los cuales se mueve la barra de vector (4) utilizando el receptor (6), configurada para medir la longitud relativa entre las coordenadas captadas,
en el que el sistema de medición tridimensional está configurado para aplicar una relación entre la longitud absoluta y la longitud relativa al re-escalar la distancia real entre dos posiciones medidas por la barra de vector (4) para obtener de esta manera una distancia real precisa entre las dos posiciones.
2. Un método para captar una distancia entre dos posiciones utilizando un sistema de posicionamiento global de interior (IGPS), en que el método comprende:
radiar haces de abanico (12, 13) utilizando una pluralidad de transmisores ópticos (1, 5a, 5b) del IGPS;
detectar los haces de abanico radiados (12, 13) utilizando un receptor (6) del IGPS, en que el IGPS detecta una posición del receptor (6) como una coordenada tridimensional utilizando
los transmisores ópticos (1, 5a, 5b)
caracterizado porque comprende además las fases de:
medir utilizando un codificador lineal (3) una longitud absoluta entre dos puntos entre los que se mueve el codificador lineal (3) en una barra de re-escalado (2) que tiene escalas lineales
en la misma;
captar utilizando una barra de vector (4) equipada con el receptor (6) y que tiene un extremo unido al codificador lineal (3), coordenadas de los dos puntos entre los cuales se mueve la barra de vector (4) utilizando el receptor (6), y medir utilizando la barra de vector (4) una longitud relativa a partir de las coordenadas captadas; y
aplicar una relación entre la longitud absoluta y la longitud relativa al re-escalar una distancia real entre dos posiciones medida por la barra de vector (4) para obtener de esta forma una distancia real precisa entre las dos posiciones.
Patentes similares o relacionadas:
Procedimiento y sistema para determinar un objetivo, del 18 de Diciembre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de determinación de la posición de un blanco, comprendiendo el procedimiento las etapas de: - medir con un dispositivo de […]
DISPOSITIVO MEDIDOR DEL ACORTAMIENTO O ALARGAMIENTO DEL MIEMBRO INFERIOR DERECHO DE UN PACIENTE, del 19 de Marzo de 2019, de GOIZ DURAN, Isaac: 1. Aparato medidor del acortamiento o alargamiento del miembro inferior derecho de un paciente caracterizado porque comprende: - Un computador que comprende […]
DISPOSITIVO INDICADOR DE LA DISTANCIA, VELOCIDAD E INTENCIONES DEL VEHÍCULO QUE NOS SIGUE., del 9 de Enero de 2017, de CARO MORALES, Francisco: Dispositivo indicador de la distancia, velocidad e intenciones del vehículo que nos sigue, facilitando información sobre si pretende adelantar, […]
 Método y dispositivo de control postural y de la distancia de lectura en tiempo real, para prevención y tratamiento de las alteraciones de la visión, del 16 de Julio de 2015, de UNIVERSIDAD COMPLUTENSE DE MADRID: Método y dispositivo de control postural y de la distancia de lectura en tiempo real, para prevención y tratamiento de las alteraciones de la visión.
Se describe un sistema […]
Método y dispositivo de control postural y de la distancia de lectura en tiempo real, para prevención y tratamiento de las alteraciones de la visión, del 16 de Julio de 2015, de UNIVERSIDAD COMPLUTENSE DE MADRID: Método y dispositivo de control postural y de la distancia de lectura en tiempo real, para prevención y tratamiento de las alteraciones de la visión.
Se describe un sistema […]
 ZOO VIRTUAL INTERACTIVO, del 5 de Julio de 2010, de TAOSPAIN INTERACTIVE, S.L: Zoo virtual interactivo que comprende al menos una pantalla de visualización , cada una representado un área del zoo, una pluralidad de terminales […]
ZOO VIRTUAL INTERACTIVO, del 5 de Julio de 2010, de TAOSPAIN INTERACTIVE, S.L: Zoo virtual interactivo que comprende al menos una pantalla de visualización , cada una representado un área del zoo, una pluralidad de terminales […]
SISTEMA DETECTOR DE OBSTACULOS BASADO EN TECNOLOGIA LASER., del 16 de Octubre de 2004, de UNIVERSIDAD DE ALCALA.: La actual instancia por la que se solicita la patente consiste en la fabricación de un sistema detector de obstáculos basado en tecnología láser (puntero […]
SISTEMA DE MEDIDA DE DISTANCIAS MEDIANTE UN HAZ LASER MODULADO CON SEÑALES SEUDOALEATORIAS., del 16 de Diciembre de 2000, de ELAPSA, S.L.: Sistema de medida de distancias mediante un haz láser modulado con señales seudoaleatorias. El sistema utiliza la función de correlación entre dos secuencias seudoaleatorias. […]
 DETECTOR OPTICO DE EMISION REGULADA, del 1 de Marzo de 2008, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Detector óptico que comprende un sistema de emisión y de recepción apto para generar una corriente eléctrica de emisión pulsada y para emitir en consecuencia […]
DETECTOR OPTICO DE EMISION REGULADA, del 1 de Marzo de 2008, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Detector óptico que comprende un sistema de emisión y de recepción apto para generar una corriente eléctrica de emisión pulsada y para emitir en consecuencia […]