Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
Método de control del accionamiento de un brazo robótico que comprende las siguientes etapas: a) mover el brazo robótico mediante una acción programada en un controlador; b) medir la fuerza que el brazo robótico realiza en determinados puntos del movimiento de la etapa a); c) comparar la fuerza ejercida en cada uno de los puntos de la etapa b) con datos de un perfil de fuerza almacenados en el controlador; d) como resultado de la comparación del punto c), generar una señal de alarma si la fuerza medida en la etapa b), se encuentra fuera de los límites definidos en el perfil de fuerza y realizar la etapa a) si la fuerza medida en la etapa b) se encuentra entre los límites definidos en el perfil de fuerza.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331074.
Solicitante: KIRO ROBOTICS, S.L.
Nacionalidad solicitante: España.
Inventor/es: AGUERRE,Jean-philippe, LIZARI ILLARRAMENDI,Borja, TELLERIA GARAY,Naiara, AMILIBIA ZUBELDIA,Ekhi, BELLOSO ARSUAGA,Amaia.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61J3/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61J RECIPIENTES ESPECIALMENTE ADAPTADOS PARA USOS MEDICOS O FARMACEUTICOS; DISPOSITIVOS O METODOS ESPECIALMENTE CONCEBIDOS PARA CONFERIR A LOS PRODUCTOS FARMACEUTICOS UNA FORMA FISICA O DE ADMINISTRACION PARTICULAR; DISPOSITIVOS PARA ADMINISTRAR ALIMENTOS O MEDICINAS VIA ORAL; CHUPETES PARA BEBES; ESCUPIDERAS. › Dispositivos o métodos especialmente concebidos para conferir a los productos farmacéuticos una forma física o de administración particular (aspectos químicos ver las clases correspondientes).
- B25J13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- B25J9/16 B25J […] › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B13/04 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › que implican el uso de modelos o de simuladores.
Fragmento de la descripción:
Método de control del accionamiento de un brazo robótico y brazo robótico que utiliza dicho método.
La presente invención hace referencia a un método de control de fuerza de un brazo robótico y un brazo robótico que utiliza dicho método. En particular, la presente invención hace referencia a un método de control de fuerza de brazos robóticos en aplicaciones farmacéuticas para la preparación de medicamentos.
Son conocidos en la técnica múltiples dispositivos mecánicos para su incorporación en alguno de los ejes de los brazos robóticos que permiten medir la fuerza que realiza el robot en los ejes e, igualmente, es conocido disponer de un obstáculo mecánico que impida su movimiento cuando la fuerza que se realiza en el citado eje excede un valor umbral.
Por otra parte, son conocidos algoritmos de control para detener el movimiento de un brazo robótico cuando excede un determinado valor umbral de fuerza realizada.
Sin embargo, en la aplicación particular de preparación de medicamentos farmacéuticos, no es suficiente con determinar umbrales de fuerza ya que, por ejemplo, la fuerza de punción requerida para atravesar la parte elastomérica de un vial con una aguja es una fuerza variable y es evidente que, en el momento inicial de la punción la fuerza que se requiere ejercer es mayor que una vez se ha atravesado la parte elastomérica y la aguja se encuentra dentro del vial. El hecho de disponer umbrales de fuerza constantes para realizar esta acción no aporta información sobre si, por ejemplo, se ha efectuado una punción inadecuada, si se ha roto la aguja o si no hay aguja en la jeringa ya que el brazo robótico carece de información suficiente para determinar si la fuerza que se está ejecutando es una fuerza para condiciones normales, únicamente sabe que si excede un umbral determinado podría dañar el vial.
El método según la presente invención permite además determinar si falta algún elemento en el sistema (por ejemplo, vial, bolsa, aguja, jeringa) o determinar si se ha producido una colisión debido a una interferencia con algún otro elemento del sistema o con elementos externos.
Este método puede complementarse con otro tipo de sensores, tales como cámaras,
detectores de presencia, equipos de pesaje, etc. para comprobar que existe una anormalidad en el procedimiento antes de activar la señal de alarma.
El documento WO2012172418 da a conocer un dispositivo y un método para la preparación de medicamentos que comprende brazos robóticos susceptibles de aplicación del método de control de fuerzas objeto de la presente invención. Se observa que en el dispositivo descrito en WO2012172418 podría incorporar un mecanismo de control de fuerzas, como mínimo, al efectuar una punción en el vial para extraer/introducir líquidos mediante una jeringa, en el momento de disponer una jeringa en la báscula (para detectar que no existan obstáculos), al colocar y retirar viales del plato de distribución, etc.
Por tanto, es necesario incorporar algún método de medición de fuerzas en brazos robóticos que se base, no solo en la medición y la protección una vez se excede un valor umbral determinado, sino que, adicionalmente, se disponga de mayor información que permita controlar el accionamiento durante su funcionamiento.
En consecuencia la presente invención da a conocer un método de control del accionamiento de un brazo robótico que comprende límites dinámicos adecuados a diversos puntos de una secuencia de movimientos de un robot para una acción determinada, a estos límites dinámicos se les conoce como perfiles de fuerza.
Sorprendentemente, mediante la incorporación de estos perfiles de fuerza, el brazo robótico puede determinar si una fuerza está por debajo o por encima de las condiciones normales de operación para una acción determinada dotando al brazo robótico de una capacidad de autodiagnóstico y de alarmas que no se pueden obtener mediante umbrales fijos.
En concreto, la presente invención da a conocer un método de control del accionamiento de un brazo robótico, preferentemente, en brazos robóticos de preparación de medicamentos que, en lugar de tener un umbral determinado, dispone de un perfil de fuerza en el que se guarda la información de la fuerza que debe ejercer el brazo en condiciones normales. De esta manera, se define la fuerza necesaria en determinados instantes del brazo para ejecutar una operación y, así, poder detectar cuando ocurren anomalías en el procedimiento y tomar acciones correctivas.
Por tanto, la presente invención da a conocer un método de control del accionamiento de un brazo robótico que comprende las siguientes etapas:
a) mover el brazo robótico mediante una acción programada en un controlador;
b) medir la fuerza que el brazo robótico realiza en determinados puntos del movimiento de la etapa a);
c) comparar la fuerza ejercida en cada uno de los puntos de la etapa b) con datos de un perfil de fuerza almacenados en el controlador;
d) como resultado de la comparación del punto c), generar una señal de alarma si la fuerza medida en la etapa b), se encuentra fuera de los límites definidos en el perfil de fuerza y realizar la etapa a) si la fuerza medida en la etapa b) se encuentra entre los límites definidos en el perfil de fuerza.
Preferentemente, el perfil de fuerza comprende, como mínimo, la fuerza máxima y/o mínima que puede ejercer el brazo robótico en una serie de puntos de su movimiento.
En realizaciones particulares, la presente invención mide la fuerza de la etapa b) en determinados puntos tomados con un muestreo repetitivo en función del tiempo (en milisegundos) o del espacio (en fracción de milímetro) del movimiento de la etapa a).
Por otra parte, el perfil de fuerza puede realizarse, entre otras, de las siguientes formas:
Proporcional: se define un valor de fuerza típico. Posteriormente se define una tolerancia y sólo se autorizarán las fuerzas que se mantengan en dicho rango de tolerancia.
Integral: A medida que el brazo se mueve se van integrando los valores de fuerza en la vecindad de cada punto y se da un valor máximo a dicha integración.
Adaptativo: Mediante algoritmos automáticos de aprendizaje se va modificando el perfil de fuerza según el funcionamiento del dispositivo.
Es importante destacar que dichas formas de determinación de fuerza no son excluyentes entre ellas por lo que también se pueden realizar combinaciones y estas combinaciones caerían dentro del ámbito de protección de la presente invención.
Además, la señal de alarma generada en la etapa b) podría configurarse para que detenga
el movimiento del brazo robótico, para que se vaya a una posición de alarma o simplemente para que genere un mensaje al usuario indicando una realización de fuerza errónea para el tipo de acción realizada y que sea el usuario quien defina que acción se debe realizar.
En realizaciones particulares de la presente invención, el controlador comprende una pluralidad de perfiles de fuerza para diferentes tipos de movimiento.
Preferentemente, diferentes acciones que ejecuta el brazo robótico (tales como, retirar líquidos de un vial, realizar una mezcla de medicamentos, pesar una jeringa) tienen un perfil de fuerza determinado que define la fuerza que debe realizar el brazo en una serie de instantes. Cada perfil de fuerzas define el rango de fuerzas que se pueden presentar cuando se realiza la acción en condiciones normales y dichos perfiles se encuentran almacenados, preferentemente en el controlador.
Por otra parte, la presente invención también da a conocer un brazo robótico que comprende un controlador en el que se almacenan una serie de movimientos, una interfaz gráfica para la selección de la secuencia de movimientos a realizar y medios de medición de la fuerza que realiza el brazo, en el que el citado controlador comprende una memoria en la que se encuentran almacenados diversos perfiles de fuerza para determinados movimientos.
Preferentemente, dichos perfiles de fuerza comprenden, como mínimo, datos de la fuerza máxima y/o mínima a realizar en determinados puntos.
Además, el brazo robótico de la presente invención contempla la incorporación de un sistema de detención de movimientos que se activa mediante una señal de alarma. Dicha señal de alarma se activa, de manera preferente, mediante un comparador que compara los datos de fuerza realizada con los datos de fuerza de los perfiles de fuerza.
Para su mejor comprensión se adjuntan, a título de ejemplo explicativo pero no limitativo, unos dibujos de un método de control del accionamiento de un brazo robótico y del brazo robótico.
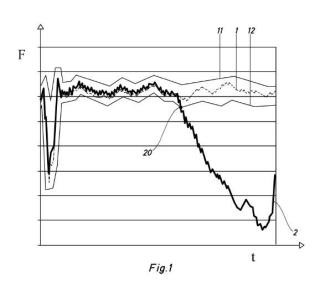
La figura 1 muestra un diagrama...
Reivindicaciones:
1. Método de control del accionamiento de un brazo robótico caracterizado porque comprende las siguientes etapas:
a) mover el brazo robótico mediante una acción programada en un controlador;
b) medir la fuerza que el brazo robótico realiza en determinados puntos del movimiento de la etapa a);
c) comparar la fuerza ejercida en cada uno de los puntos de la etapa b) con datos de un perfil de fuerza almacenados en el controlador;
d) como resultado de la comparación del punto c), generar una señal de alarma si la fuerza medida en la etapa b), se encuentra fuera de los límites definidos en el perfil de fuerza y realizar la etapa a) si la fuerza medida en la etapa b) se encuentra entre los límites definidos en el perfil de fuerza.
2. Método, según la reivindicación 1, comprendiendo dicho perfil de fuerza, como mínimo, la fuerza máxima y/o mínima que puede ejercer el brazo robótico para una serie de puntos.
3. Método, según cualquiera de las reivindicaciones anteriores, caracterizado porque la señal de alarma generada en la etapa b) detiene el movimiento del brazo robótico.
4. Método, según cualquiera de las reivindicaciones anteriores, caracterizado porque el controlador comprende una pluralidad de perfiles de fuerza para diferentes tipos de movimiento.
5. Brazo robótico que comprende un controlador en el que se almacenan una serie de movimientos, una interfaz gráfica para la selección de la secuencia de movimientos a realizar y medios de medición de la fuerza que realiza el brazo caracterizado porque el citado controlador comprende una memoria en la que se encuentran almacenados diversos perfiles de fuerza para determinados movimientos.
6. Brazo robótico, según la reivindicación 5, caracterizado porque dicho perfiles de fuerza comprenden, como mínimo, datos de la fuerza máxima y/o mínima a realizar en determinados puntos.
7. Brazo robótico, según cualquiera de las reivindicaciones 5 ó 6, caracterizado porque
comprende un sistema de detención de movimientos que se activa mediante una señal de alarma.
8. Brazo robótico, según la reivindicación 7, caracterizado porque la señal de alarma se 5 activa mediante un comparador que compara los datos de fuerza realizada con los datos de
fuerza de los perfiles de fuerza.
9. Brazo robótico caracterizado porque ejecuta un método según cualquiera de las reivindicaciones 1 a 5.
Patentes similares o relacionadas:
Forma de dosificación del fármaco alcaloide vinca, del 8 de Julio de 2020, de Sun Pharmaceutical Industries LTD: Una forma de dosificación que comprende: una solución acuosa que comprende una cantidad terapéuticamente eficaz de un fármaco alcaloide de vinca o su sal […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Dispositivo de pulverización y método de accionamiento correspondiente, del 8 de Abril de 2020, de BECTON, DICKINSON AND COMPANY: Un dispositivo de pulverización que comprende: un cuerpo tubular , que incluye una superficie interna y unos primer y segundo extremos […]
Métodos y sistemas para vaciar un envase de desperdicios, del 1 de Abril de 2020, de GE HEALTHCARE LIMITED: Un método para dirigir un fluido de desperdicios desde un dispositivo de síntesis de radiofármacos a un envase de desperdicios que comprende las etapas de: […]
Lector de etiquetas para un mezclador de fármacos automático, del 18 de Marzo de 2020, de CAREFUSION 303, INC: Sistema de mezclador , que comprende: una rueda rotatoria que tiene una abertura de vial configurada para recibir un vial que contiene […]
Método y máquina para producir bolsas de producto de solución estéril, del 19 de Febrero de 2020, de BAXTER INTERNATIONAL INC.: Un método para proporcionar una pluralidad de bolsas de producto llenas de fluido estéril, de tal manera que el método comprende: proporcionar […]
Aparato y procedimiento para marcar objeto comestible, del 12 de Febrero de 2020, de Qualicaps Co., Ltd: Un aparato para marcar un objeto comestible (E), que comprende: un medio portador para transportar el objeto comestible (E), […]
Formulaciones que contienen linaclotida para administración oral, del 22 de Enero de 2020, de IRONWOOD PHARMACEUTICALS, INC: Composición farmacéutica que comprende un portador farmacéuticamente aceptable, linaclotida, un catión seleccionado de Mg2+, Ca2+, Zn2+, Mn2+, […]