Procedimiento y sistema para controlar un control de crucero de un vehículo.
Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
• conducir dicho vehículo con dicho control de crucero activo y fijado para mantener una velocidad objetivo del vehículo fijada (vcc velocidad objetivo fijada);
• registrar una condición actual del vehículo, que comprende al menos una posición actual del vehículo (A), una razón de desmultiplicación engranada actualmente, razones de desmultiplicación disponibles, velocidad actual del vehículo, par de propulsión máximo disponible y topografía de una carretera de la carretera por llegar que comprende una próxima pendiente de subida por llegar;
• basándose en dicha condición actual del vehículo, predecir una reducción de marcha en una posición del vehículo por llegar (C) en dicha pendiente de subida por llegar debido a una disminución de la velocidad del vehículo y seleccionar al menos una actividad que dé como resultado que dicha reducción de marcha pueda ser pospuesta o evitada;
• controlar dicho control de crucero de acuerdo con dicha actividad seleccionada;
y donde dicha actividad comprende las etapas de:
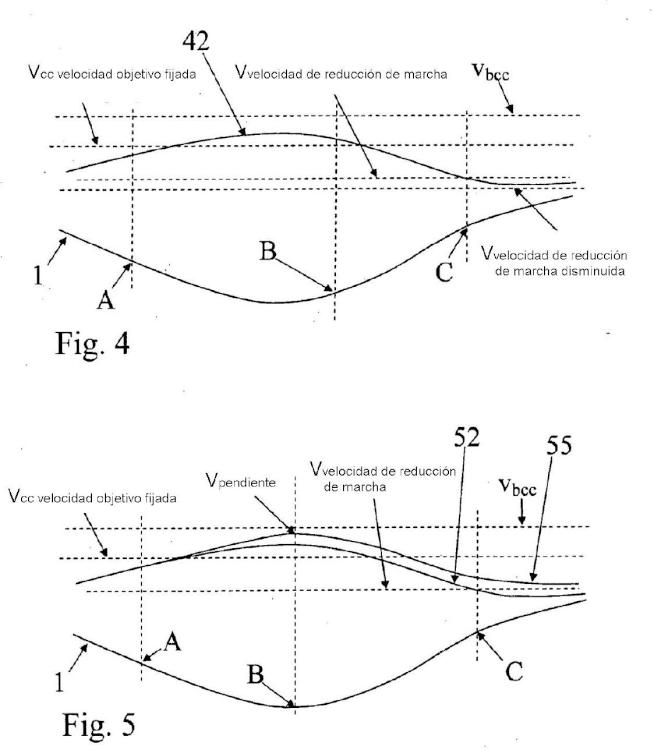
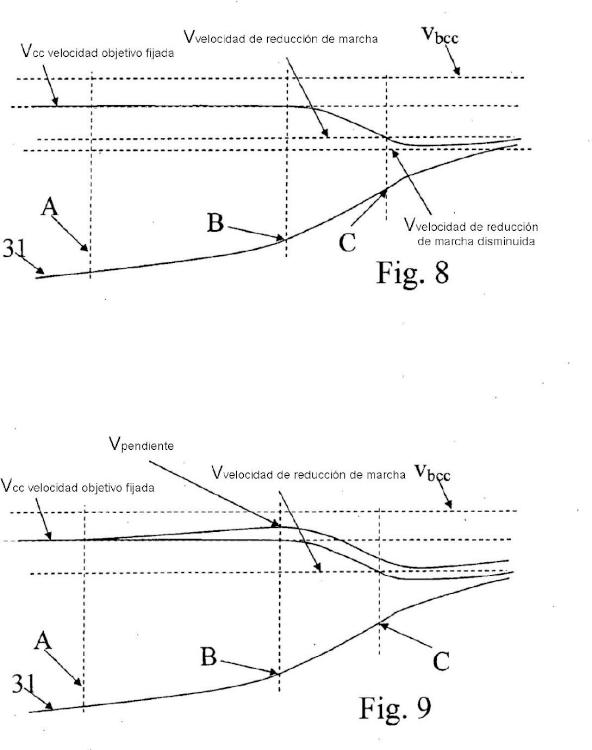
• disminuir temporalmente un límite de reducción de marcha de dicha marcha actualmente engranada con una posible cantidad predeterminada hasta un límite de velocidad de reducción de marcha disminuida (vvelocidad de reducción de marcha disminuida);
• predecir si dicha reducción de marcha se pospondrá lo suficiente o se evitará;
• si se predice que dicha reducción de marcha no se pospondrá lo suficiente o no se evitará, realizar entonces dicha reducción temporal de dicho límite de reducción de marcha; y basándose adicionalmente en dicha condición actual del vehículo, calcular una velocidad mínima del vehículo (vpendiente) para una primera posición del vehículo (B) en donde el vehículo comenzará a retrasarse en dicha pendiente de subida y que dará como resultado que dicha reducción de marcha se pueda posponer lo suficiente o evitar;
• basándose en dicha condición actual del vehículo controlar dicho control de crucero con el fin de, durante la conducción del vehículo hacia dicha primera posición del vehículo (B), aumentar la velocidad del vehículo hasta dicha velocidad mínima del vehículo cuando dicho vehículo haya alcanzado finalmente dicha primera posición del vehículo (B).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/009169.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: ERIKSSON, ANDERS, BJERNETUN,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
- B60W30/14 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de crucero.
PDF original: ES-2532467_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema para controlar un control de crucero de un vehículo Campo técnico
La presente invención se refiere a un procedimiento para controlar un control de crucero en un vehículo, de acuerdo con la primera parte de las reivindicaciones adjuntas 1 y 3. La Invención se refiere asimismo a un sistema de control de crucero de un vehículo destinado a tal procedimiento para controlar dicho control de crucero, de acuerdo con la reivindicación adjunta 6.
La presente Invención se refiere Igualmente a un programa de ordenador, producto de programa de ordenador y medio de almacenamiento para un ordenador, todos ellos para su uso con un ordenador para ejecutar dicho procedimiento.
Técnica anterior
Los vehículos de motor, tales como coches, camiones, vehículos de remolque y autobuses, están provistos a menudo con un sistema denominado de control de crucero, denominado igualmente sistema de control de velocidad, para controlar automáticamente la velocidad del vehículo. Tal sistema de control de crucero comprende medios, tales como un sensor de velocidad, para monitorizar la velocidad real del vehículo. El sistema de control de crucero compara la velocidad real del vehículo con una velocidad objetivo fijada. La velocidad objetivo puede Introducirse en el sistema de control de crucero, por ejemplo, como la velocidad prevalente real del vehículo cuando se acciona un interruptor de ajuste por el conductor. El sistema de control de crucero genera una señal de error al comparar la velocidad real del vehículo con la velocidad objetivo. La señal de error se utiliza a continuación, por ejemplo, para controlar un actuador acoplado con la bomba de combustible o con el acelerador del vehículo con el fin de cambiar la velocidad del motor hasta que la señal de error sea sustancialmente cero, es decir, hasta que la velocidad real del vehículo sea igual a la velocidad objetivo.
Los documentos EP 1439976, US69941 y US 6 199 1 B, que constituyen la técnica anterior más cercana, dan a conocer dos ejemplos de la técnica anterior donde se ha desarrollado aún más el sistema de control de crucero. Aquí el sistema de control de crucero es un sistema de control de crucero predlctlvo, que utiliza información acerca de la posición actual del vehículo y la topografía de la carretera por llegar, esto es, por ejemplo gradientes o valores de elevación de la carretera por llegar con el fin de controlar la apertura del acelerador de tal modo que se aumente la eficiencia de consumo de combustible.
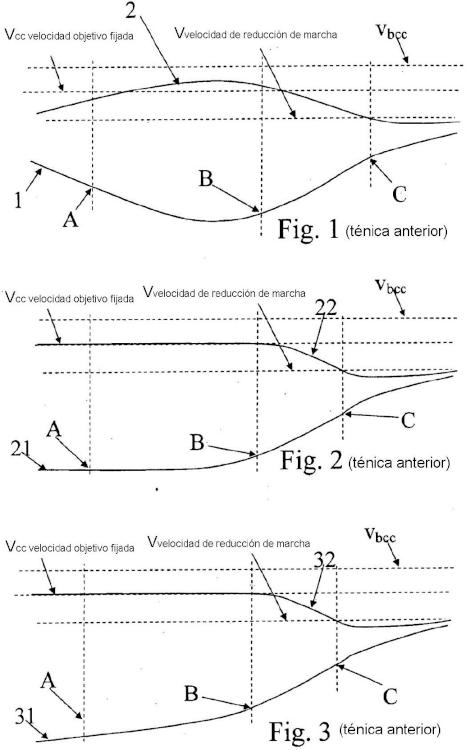
Un problema con controles de crucero de la técnica anterior es que pueden tener lugar reducciones de marcha innecesarias durante ciertas condiciones de conducción del vehículo. Tres ejemplos de tales condiciones de conducción del vehículo se dan a conocer en las figuras 1 a 3. Cada una de dichas figuras da a conocer un ejemplo típico de un perfil de sección de carretera 1, 21 y 31, donde pueden ocurrir tales reducciones de marcha innecesarias. El perfil de sección de carretera 1 en la figura 1 da a conocer una pendiente de bajada seguida de una pendiente de subida. Una curva superior 2 da a conocer cómo la velocidad del vehículo varía cuando se conduce en dicho perfil de sección de carretera 1 y un control de crucero fijado a una velocidad objetivo Vcc velocidad objetivo fijada- En el ejemplo dado a conocer, se fija una velocidad de embalamiento máxima permisible vbcc para cuando un crucero de frenado active frenos auxiliares y/o frenos de servicio de dicho vehículo con el fin de no superar dicha vbcc al conducir en una pendiente de bajada. Con la condición del vehículo prevalente se engrana una cierta marcha en una transmisión de dicho vehículo y se determina un límite de velocidad del vehículo menor para cuando ocurra una reducción de marcha (vveioc¡dad de reducción de marcha) a una marcha menor (con una razón de desmultiplicación mayor). Dicha marcha engranada puede ser una marcha directa o una marcha en la que se transmite un par por medio de parejas de ruedas dentadas en la transmisión (caja de cambios). En la figura 1, cuando el vehículo está en la posición A, el vehículo está acelerando, y finalmente acelerará hasta un poco por encima de la vcc velocidad objetivo fijada tras la posición A. Cuando el vehículo está en la posición B, la pendiente de subida ha comenzado y la velocidad del vehículo disminuye. En el ejemplo mostrado, la inclinación es tan pronunciada que la fuerza motriz disponible del vehículo no es suficiente para mantener la vcc velocidad objetivo fijada con la marcha actual engranada. En la posición C la velocidad del vehículo ha disminuido hasta dicha vveioc¡dad de reducción de marcha y se realiza una reducción de marcha. En el ejemplo mostrado, dicha reducción de marcha da como resultado que la velocidad del vehículo comience a aumentar. Un inconveniente es que la eficiencia de consumo de combustible se pierde debido a la interrupción de la fuerza motriz durante dicha reducción de marcha. Incluso se perderá más eficiencia de consumo de combustible si dicha reducción de marcha es una reducción de marcha desde una marcha directa, ya que conducir con una marcha directa engranada es más eficiente en consumo de combustible en comparación con una marcha en la que se transmite par por medio de parejas de ruedas dentadas.
Los ejemplos dados a conocer en las figuras 2 y 3 dan a conocer reducciones de marcha C correspondientes para dos perfiles de sección de carretera 21 y 31 adicionales posibles. El perfil de sección de carretera 21 parte de una
carretera horizontal seguida por una pendiente de subida. El perfil de sección de carretera de 31 parte de una ligera pendiente de subida, que es seguida por una pendiente de subida.
El objeto de la presente invención es desarrollar aún más tal sistema de control de crucero donde se utiliza por el sistema de control de crucero información acerca de la posición actual del vehículo y de la topografía de la carretera por llegar para controlar la velocidad del vehículo.
Sumario de la invención
Así pues, el objeto principal de la presente Invención es presentar un procedimiento mejorado para control de crucero que puede evitar reducciones de marcha Innecesarias en pendientes de subida. Esto se consigue mediante un procedimiento como se analiza en la introducción, cuyas características se definen por las reivindicaciones 1 y 3. El objeto se consigue igualmente mediante un sistema como se analiza en la introducción, cuyas características se definen por la reivindicación 6.
El procedimiento de acuerdo con la invención es un procedimiento para controlar un control de crucero durante la conducción de un vehículo. Dicho procedimiento comprende (incluye, aunque no se limita necesariamente a) las etapas de:
conducir dicho vehículo con dicho control de crucero activo y fijado para mantener una velocidad objetivo del vehículo fijada;
registrar la condición actual del vehículo, que comprende al menos una posición actual del vehículo, una razón de desmultiplicación engranada actualmente, razones de desmultiplicación disponibles, velocidad actual del vehículo, par de propulsión máximo disponible y topografía de la carretera de una carretera por llegar que comprende una próxima pendiente de subida por llegar;
basándose en dicha condición actual del vehículo, predecir una reducción de marcha en una posición del vehículo por llegar en dicha pendiente de subida por llegar debido a una disminución de la velocidad del vehículo y seleccionar al menos una actividad que dé como resultado que dicha reducción de marcha pueda ser pospuesta o evitada;
controlar dicho control de crucero de acuerdo con dicha actividad seleccionada.
De acuerdo con un primer modo de realización alternativo de dicha invención, dicha actividad comprende la etapa
de:
disminuir temporalmente un límite de reducción de marcha de dicha marcha actualmente engranada con una posible cantidad predeterminada hasta un límite de velocidad de reducción de marcha disminuida.
De acuerdo con un modo de realización adicional de dicha invención, dicho procedimiento dicha actividad comprende además las etapas de:
predecir si dicha reducción de marcha se pospondrá lo suficiente o se evitará;
si se predice que dicha reducción de marcha no se pospondrá lo suficiente o no se evitará, realizar entonces dicha reducción temporal de dicho límite de reducción de marcha;
y basándose adicionalmente en dicha condición actual del vehículo, calcular una velocidad mínima del vehículo para una primera posición del vehículo en donde el vehículo comenzará a retrasarse en dicha pendiente de subida y que dará como resultado que dicha reducción de marcha... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
- conducir dicho vehículo con dicho control de crucero activo y fijado para mantener una velocidad objetivo del
Vehículo fijada (Vccvelocidad objetivo fijada))
- registrar una condición actual del vehículo, que comprende al menos una posición actual del vehículo (A), una razón de desmultiplicación engranada actualmente, razones de desmultiplicación disponibles, velocidad actual del vehículo, par de propulsión máximo disponible y topografía de una carretera de la carretera por llegar que comprende una próxima pendiente de subida por llegar;
- basándose en dicha condición actual del vehículo, predecir una reducción de marcha en una posición del vehículo por llegar (C) en dicha pendiente de subida por llegar debido a una disminución de la velocidad del vehículo y seleccionar al menos una actividad que dé como resultado que dicha reducción de marcha pueda ser pospuesta o evitada;
- controlar dicho control de crucero de acuerdo con dicha actividad seleccionada; y donde dicha actividad comprende las etapas de:
- disminuir temporalmente un límite de reducción de marcha de dicha marcha actualmente engranada con una posible cantidad predeterminada hasta un límite de velocidad de reducción de marcha disminuida (vveioc¡dad de
reducción de marcha disminuida),
- predecir si dicha reducción de marcha se pospondrá lo suficiente o se evitará;
- si se predice que dicha reducción de marcha no se pospondrá lo suficiente o no se evitará, realizar entonces dicha reducción temporal de dicho límite de reducción de marcha; y basándose adicionalmente en dicha condición actual del vehículo, calcular una velocidad mínima del vehículo (vpend¡ente) para una primera posición del vehículo (B) en donde el vehículo comenzará a retrasarse en dicha pendiente de subida y que dará como resultado que dicha reducción de marcha se pueda posponer lo suficiente o evitar;
- basándose en dicha condición actual del vehículo controlar dicho control de crucero con el fin de, durante la conducción del vehículo hacia dicha primera posición del vehículo (B), aumentar la velocidad del vehículo hasta dicha velocidad mínima del vehículo cuando dicho vehículo haya alcanzado finalmente dicha primera posición del vehículo (B).
2. El procedimiento de acuerdo con la reivindicación 1, donde dicha disminución temporal de un límite de reducción de marcha de dicha marcha actualmente engranada es activa durante la conducción en dicha pendiente de subida.
3. Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
- conducir dicho vehículo con dicho control de crucero activo y fijado para mantener una velocidad objetivo fijada del vehículo (Vcc velocidad objetivo fijada),
- registrar la condición actual del vehículo, que comprende al menos una posición actual del vehículo (A), una razón de desmultiplicación engranada actualmente, razones de desmultiplicación disponibles, velocidad actual del vehículo, par de propulsión máximo disponible y topografía de la carretera de una carretera por llegar que comprende una próxima pendiente de subida por llegar;
- basándose en dicha condición actual del vehículo predecir una reducción de marcha en una posición del vehículo por llegar (C) en dicha pendiente de subida por llegar debido a la disminución de velocidad del vehículo y seleccionar al menos una actividad que dé como resultado que dicha reducción de marcha se pueda posponer o evitar;
- controlar dicho control de crucero de acuerdo con dicha actividad seleccionada;
y en donde dicha actividad comprende las etapas de:
- basándose en dicha condición actual del vehículo calcular una velocidad mínima del vehículo para una primera posición del vehículo (B) donde el vehículo comenzará a retrasarse en dicha pendiente de subida, lo que da como resultado que dicha reducción de marcha pueda ser pospuesta o evitada;
- basándose en dicha condición actual del vehículo controlar dicho control de crucero con el fin de, durante la conducción del vehículo hacia dicha primera posición del vehículo (B), aumentar la velocidad del vehículo hasta dicha velocidad mínima del vehículo cuando dicho vehículo finalmente ha alcanzado dicha primera posición del vehículo (B).
4. El procedimiento de acuerdo con una de las reivindicaciones 1 y 3, en donde dicho aumento de una velocidad del vehículo hasta dicha velocidad mínima del vehículo (vPend¡ente) solo se permite si la diferencia entre dicha velocidad objetivo del vehículo fijada (Vcc velocidad objetivo fijada) y dicha velocidad mínima del vehículo (vpendiente) está por debajo de un valor predeterminado.
5. El procedimiento de acuerdo con una de las reivindicaciones anteriores, en donde dicha reducción de marcha predicha es una reducción de marcha desde una marcha directa.
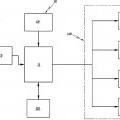
6. Un sistema de control de crucero que comprende una unidad de control dispuesta para mantener una velocidad 15 objetivo del vehículo fijada (vCCveioc¡dad objetivo fijada), un interfaz de entrada del conductor, un dispositivo de identificación
de la posición del vehículo, un dispositivo de identificación de la topografía de la carretera, caracterizado por que dicha unidad de control está programada para realizar las etapas de la reivindicación 1 o 3.
7. Un programa de ordenador que comprende unos medios de código de programa para realizar todas las etapas 2 de las reivindicaciones 1 o 3 cuando dicho programa se ejecuta en un ordenador.
8. Un producto de programa de ordenador que comprende medios de código de programa almacenados en un medio legible por ordenador para realizar todas las etapas de las reivindicaciones 1 o 3 cuando dicho producto de programa se ejecuta en un ordenador.
9. Un medio de almacenamiento, tal como una memoria de ordenador (52) o un medio de almacenamiento de datos no volátil (55), para su uso en un entorno de ordenador, comprendiendo la memoria un código de programa legible por ordenador para realizar el procedimiento de las reivindicaciones 1 o 3.
Patentes similares o relacionadas:
SISTEMA DE MEJORA DE MODO DE CONDUCCIÓN CRUCERO CON INCLUSIÓN DE RUTAS CON TRAYECTOS CURVOS BASADO EN AJUSTES DE VELOCIDAD AUTOMÁTICOS, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración en vehiculos y un método de operación de los mismos que permite cambios de comportamiento en éste para posibilitar […]
Vehículo que comprende un conjunto de rueda, del 23 de Octubre de 2018, de Nissan Motor Manufacturing (UK) Ltd: Vehículo que incluye un sistema de control del vehículo; un controlador ; y al menos un conjunto de rueda; dicho conjunto de rueda incluye […]
Procedimiento y sistema para controlar una distancia de conducción, del 22 de Junio de 2016, de VOLVO LASTVAGNAR AB: Un procedimiento para controlar una distancia de conducción entre un vehículo anfitrión (H) y un primer vehículo (A) que conduce por delante de dicho […]
Método, control y sistema para controlar un pedal de realimentación de fuerza de acelerador (AFFP) como sistema de asistencia para control de distancia o velocidad en el tráfico por carretera, del 11 de Mayo de 2016, de CONTI TEMIC MICROELECTRONIC GMBH: Procedimiento para la regulación de la fuerza de recuperación de una unidad de control de automóviles, en el que en la unidad de control se trata de un pedal de acelerador o de […]
 Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
Procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil enfrentado a un riesgo de colisión, del 5 de Noviembre de 2014, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil, comprendiendo el citado sistema de ayuda a […]
 Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]
Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]
MÉTODO Y DISPOSITIVO PARA ALERTAR DE LA PROXIMIDAD DE UNA ZONA DE PEAJE, del 7 de Diciembre de 2011, de RENAULT S.A.S.: Procedimiento para alertar al conductor de un vehículo (V) equipado con un sistema de navegación a bordo , con un regulador de velocidad (RV), de la proximidad de una zona […]