Grapadora automática.
Grapadora automática para cerrar envases (9, 10) en forma de tubos flexibles mediante grapas con dispositivos de estrangulación para estrangular el envase (9,
10) y con al menos dos brazos de cierre (1, 2, 3) concebidos para realizar desde diferentes direcciones respectivamente un movimiento de pivotamiento hacia el envase (9, 10) estrangulado, y con un dispositivo de corte en uno de los brazos de cierre (1) para seccionar el envase (9, 10) estrangulado entre los puntos de cierre, que comprende una cuchilla de corte (4) y un accionamiento de cuchilla (5, 6, 7) que está concebido de tal forma que la cuchilla de corte (4) puede realizar un movimiento de pivotamiento a través del eje de tubo flexible entre los puntos de cierre, caracterizada porque en otro brazo de cierre (3) está dispuesta una contra-cuchilla (8), presentando ambas cuchillas (4, 8) filos cortantes (4a, 8a) que discurren paralelamente con respecto a un plano de corte situado entre las cuchillas (4, 8) que cruza el eje de tubo flexible entre los puntos de cierre, y las cuchillas (4, 8) presentan en sus lados orientados uno a otro superficies de corte (4b, 8b) paralelas, a continuación de las cuales, más allá de los filos cortantes (4a, 8a) están situadas superficies de cuña (4c, 8c), incidiendo unas en otras las superficies de corte (4b, 8b) y las superficies de cuña (4c, 8c) respectivamente en un ángulo de cuña (4d, 8d) agudo, y el accionamiento de cuchilla (5, 6, 7) está concebido de tal forma que la cuchilla de corte (4) se puede mover paralelamente con respecto al plano de corte pasando delante de la contra-cuchilla (8), de tal forma que el punto de intersección de los filos cortantes (4a, 8a) se mueve desde un punto de corte inicial desde un lado del envase (9, 10) estrangulado hasta un punto de corte final más allá del envase (9, 10) estrangulado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13166405.
Solicitante: TIPPER TIE TECHNOPACK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Wilhelm-Bergner-Strasse 9a 21509 Glinde ALEMANIA.
Inventor/es: JENS,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A22C11/12 NECESIDADES CORRIENTES DE LA VIDA. › A22 CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 11/00 Fabricación de embutidos. › Aparatos para anudar las pieles de los embutidos.
PDF original: ES-2548218_T3.pdf
Fragmento de la descripción:
Grapadora automática
La invención se refiere a una grapadora automática según el preámbulo de la reivindicación 1. Las máquinas de este tipo se usan principalmente en la fabricación de embutidos. El envase en forma de tubo flexible queda formado entonces por una tripa rellena de embutido. El envase puede estar cerrado ya por un extremo, de tal manera que tiene forma de bolsa. La tripa para embutido se estrangula radialmente por secciones, de tal manera que resulta una trenza de pequeño diámetro. En las secciones de tripa estranguladas se colocan en una grapadora automática de doble grapa como la máquina según la invención dos grapas situadas a una distancia axialmente. Las grapas se doblan alrededor de la tripa, de tal manera que quedan formados cierres por grapa. Uno de ellos cierra el final del embutido delantero y el otro cierra el comienzo del embutido siguiente. Normalmente, la tripa se secciona entonces con una cuchilla entre los cierres por grapa, de tal manera que el embutido delantero se separa de la tripa.
Normalmente, la tripa está tensada con la firmeza suficiente para poder ser cortada por una cuchilla expuesta. No se requiere ningún canto contrario o similar (documento US2003/0073397A1). Sin embargo, a veces los envases son bastante elásticos o son difíciles de cortar al presentar adicionalmente una red. Para estos casos es conocido el modo de guiar la cuchilla llnealmente movida a lo largo de placas de cizallamiento, de tal forma que se produce un cizallamiento (US2006/075722A1). La carrera necesaria para ello, sin embargo, conlleva una considerable necesidad de espacio, por lo que esta forma de realización se aplica sólo en determinados tipos de máquina. Especialmente para grapadoras automáticas con dos brazos de cierre giratorios resulta poco adecuada. Es que, para que la cuchilla pueda llegar a la zona de cierre, se ha de pivotar junto al accionamiento lineal y a los medios de guía, lo que requiere muchísimo espacio.
La invención tiene el objetivo de proporcionar para una grapadora automática con brazos de cierre pivotantes un mecanismo de corte efectivo que al mismo tiempo ahorre espacio. Consigue este objetivo mediante las características de la reivindicación 1. Las reivindicaciones subordinadas contienen variantes ventajosas de la invención.
La invención está basada por una parte en el conocimiento de que el accionamiento de cuchilla se puede disponer con un ahorro especial de espacio en uno de los brazos de cierre, si está concebido para un movimiento pivotante de la cuchilla. Visto en el sentido del eje de tubo flexible del envase, el motor, el ramal de accionamiento y la cuchilla se pueden disponer sustancialmente a lo largo del brazo y se hacen pivotar junto a este, de modo que en
total resulta una necesidad de espacio reducida. Sin embargo, en el caso de un movimiento pivotante no es
constante la fuerza ejercida por la cuchilla sobre el envase. El envase puede deslizarse a lo largo del filo cortante. Para garantizar no obstante un seccionamiento seguro, se requiere una realización especial, representada en la reivindicación 1, de la cuchilla contraria y del movimiento relativo de las cuchillas una respecto a otra.
Los dispositivos de estrangulación según la invención pueden estar equipados con y sin dispositivos de guía para grapas. Pueden estar realizados como dispositivos de desplazamiento por separación, por ejemplo de tal forma que un dispositivo de estrangulación o los dos se pueden mover separándose axialmente uno de otro después de la estrangulación, a fin de formar una trenza de envase libre de material de relleno.
Los brazos de cierre son brazos que producen el proceso de doblado durante la formación del cierre por grapa. Para ello, pueden llevar herramientas de cierre, es decir, un punzón o una matriz, o realizar una función de guiado durante el proceso de doblado.
Un movimiento pivotante en el sentido de la invención es un movimiento alrededor de un eje de pivotamiento que a su vez puede ser movido. Preferentemente, sin embargo, los ejes de pivotamiento para los movimientos de
pivotamiento de los brazos de cierre son inmóviles con respecto a la grapadora automática. Además, resulta
ventajoso si el eje de pivotamiento para el movimiento de pivotamiento de la cuchilla de corte es inmóvil con respecto al brazo de cierre que lleva el dispositivo de corte. Los ejes de pivotamiento de los brazos de cierre pueden coincidir o divergir. En este último caso, sin embargo, no obstante, preferentemente están orientados paralelamente.
Un ángulo de cuña agudo es un ángulo de menos de 90°.
De manera ventajosa, el accionamiento de cuchilla comprende una palanca en la que está dispuesta la cuchilla de corte en el brazo de carga y un motor actúa sobre el brazo de fuerza. Con una palanca de este tipo es posible conseguir especialmente bien la disposición que ahorra espacio a la que se aspira.
Preferentemente, el accionamiento de cuchilla comprende un motor lineal. Esto simplifica la construcción. En este caso, además resulta ventajoso si el motor lineal es un cilindro neumático con un émbolo de inmersión. Este accionamiento es de mantenimiento especialmente reducido. Mediante la selección del diámetro de émbolo es posible ajustar una fuerza de accionamiento suficiente y, especialmente, adaptarla a la palanca.
De manera ventajosa, la cuchilla contraria está unida rígidamente al brazo de cierre, lo que simplifica el modo de construcción y lo hace fiable.
Además, resulta ventajoso si el plano de corte es perpendicular al eje de tubo flexible. En este caso, es especialmente reducida la necesidad de espacio.
Preferentemente, el filo cortante de al menos una de las cuchillas discurre a lo largo de una recta, de forma especialmente preferible también los filos cortantes de la otra cuchilla. Esto igualmente simplifica la construcción.
De manera ventajosa, el ángulo entre las tangentes de los dos filos cortantes en el punto de corte durante su curso desde el punto de corte inicial hasta el punto de corte final no es superior 45°, preferentemente a 30°, de forma especialmente preferible a 20° y de forma particularmente preferible a 10°. De esta manera, se reduce el peligro de que el envase resbale a lo largo de los filos cortantes durante el corte.
Preferentemente, el ángulo de cuña es constante a lo largo del filo cortante en al menos una de las cuchillas, preferentemente en ambas cuchillas. De esta manera, se consigue un efecto de corte uniforme.
De manera ventajosa, el ángulo de cuña no es superior a 30°, preferentemente a 20°, de forma especialmente preferible a 10° y de forma particularmente preferible a 5o. Estos ángulos pequeños han resultado ser especialmente adecuados para materiales de envase, especialmente tripas para embutido y las redes correspondientes.
A continuación, se describe en detalle un ejemplo de realización de la invención con la ayuda de dibujos. Muestran:
la figura 1, una vista en perspectiva de una parte de una grapadora automática según la invención; la figura 2, la misma parte durante el cierre de un envase en forma de tubo flexible; la figura 3, una representación de piezas de la misma parte; la figura 4, un detalle aumentado de la figura 3;
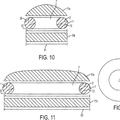
la figura 5, vistas esquemáticas en perfil de cuchillas según la invención.
En la figura 1 se ven tres brazos de cierre 1, 2 y 3. El brazo de cierre 1 Inferior lleva en su extremo dos matrices 1a y 1b. El brazo de cierre 2 superior lleva en su extremo dos punzones, de los que se puede ver uno 2a. Por debajo del brazo de cierre 2 superior se encuentra un tercer brazo de cierre 3 que en su extremo lleva un soporte 3a para grapas para transportar las grapas desde el extremo de dispositivos de almacenamiento (no representados) hasta los puntos de cierre por encima de las matrices 1a y 1b pivotadas hacia dentro y sujetarlas durante el comienzo del proceso de doblado. Se encuentran dispositivos de estrangulación axialmente al lado de los brazos de cierre 1, 2 y 3 y no están representados para mayor claridad. En la figura 2 se ven los brazos de cierre 1, 2 y 2 pivotados hacia dentro así como envases 9 y 10 en forma de tubos flexibles, ya estrangulados. El envase 9 en forma de tubo flexible ya está cerrado por su extremo delantero. El extremo trasero está siendo cerrado junto al extremo junto al extremo delantero del envase 10 adicional, de tal forma que alrededor de cada uno de estos dos extremos se dobla un clip (que no se puede ver). Entre los dos puntos de cierre, los envases 9, 10 han de separarse uno de otro.
En las figuras 3 y 4 se puede ver que en el brazo de cierre 1 inferior está dispuesta una cuchilla 4. Esta está fijada al brazo de carga de una palanca... [Seguir leyendo]
Reivindicaciones:
1.- Grapadora automática para cerrar envases (9, 10) en forma de tubos flexibles mediante grapas con dispositivos de estrangulación para estrangular el envase (9, 10) y con al menos dos brazos de cierre (1, 2, 3) concebidos para realizar desde diferentes direcciones respectivamente un movimiento de pivotamiento hacia el envase (9, 10) estrangulado, y con un dispositivo de corte en uno de los brazos de cierre (1) para seccionar el envase (9, 10) estrangulado entre los puntos de cierre, que comprende una cuchilla de corte (4) y un accionamiento de cuchilla (5, 6, 7) que está concebido de tal forma que la cuchilla de corte (4) puede realizar un movimiento de pivotamiento a través del eje de tubo flexible entre los puntos de cierre, caracterizada porque en otro brazo de cierre (3) está dispuesta una contra-cuchilla (8), presentando ambas cuchillas (4, 8) filos cortantes (4a, 8a) que discurren paralelamente con respecto a un plano de corte situado entre las cuchillas (4, 8) que cruza el eje de tubo flexible entre los puntos de cierre, y las cuchillas (4, 8) presentan en sus lados orientados uno a otro superficies de corte (4b, 8b) paralelas, a continuación de las cuales, más allá de los filos cortantes (4a, 8a) están situadas superficies de cuña (4c, 8c), incidiendo unas en otras las superficies de corte (4b, 8b) y las superficies de cuña (4c, 8c) respectivamente en un ángulo de cuña (4d, 8d) agudo, y el accionamiento de cuchilla (5, 6, 7) está concebido de tal forma que la cuchilla de corte (4) se puede mover paralelamente con respecto al plano de corte pasando delante de la contra-cuchilla (8), de tal forma que el punto de Intersección de los filos cortantes (4a, 8a) se mueve desde un punto de corte Inicial desde un lado del envase (9, 10) estrangulado hasta un punto de corte final más allá del envase (9, 10) estrangulado.
2.- Grapadora automática según la reivindicación 1, caracterizada porque el accionamiento de cuchilla (5, 6, 7) comprende una palanca (5) en la que la cuchilla de corte (4) está dispuesta en el brazo de carga y un motor (7) actúa sobre el brazo de fuerza.
3.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el accionamiento de cuchilla comprende un motor lineal (7).
4.- Grapadora automática según la reivindicación 3, caracterizada porque el motor lineal (7) es un cilindro neumático con un émbolo de inmersión.
5.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque la contra-cuchilla (8) está unida rígidamente con el brazo de cierre (3).
6.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el plano de corte es perpendicular al eje de tubo flexible.
7.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el filo cortante (4a, 8a) de al menos una de las cuchillas (4, 8), preferentemente los filos cortantes (4a, 8a) de ambas cuchillas (4, 8) discurre o discurren a lo largo de una recta.
8.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el ángulo entre las tangentes de los dos filos cortantes (4a, 8a) en el punto de intersección durante su curso desde el punto de corte inicial hasta el punto de corte final no es superior a 45°, preferentemente a 30°, de forma especialmente preferible a 20° y de forma particularmente preferible a 10°.
9.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el ángulo de cuña (4d, 8d) en al menos una de las cuchillas (4, 8), preferentemente en ambas cuchillas (4, 8), es constante a lo largo del filo cortante (4a, 8a).
10.- Grapadora automática según una de las reivindicaciones anteriores, caracterizada porque el ángulo de cuña (4d, 8d) de al menos una de las cuchillas (4, 8), preferentemente de ambas cuchillas (4, 8), no es superior a 70°, preferentemente a 50°, de forma especialmente preferible a 40° y de forma particularmente preferible a 30°.
Patentes similares o relacionadas:
Carga perfeccionada para máquinas atadoras, nudo y módulo preparatorio de cordel para máquinas atadoras, del 28 de Mayo de 2020, de LORENZO NOGUERA,SAGAR: 1. Carga perfeccionada para máquinas atadoras, aplicable en máquinas atadoras de envases o tripas de embutidos, que comprende un soporte formado por […]
Dispositivo para cerrar envases tubulares, del 1 de Enero de 2020, de TIPPER TIE TECHNOPACK GMBH: Dispositivo para cerrar envases tubulares rellenados con un material de relleno pastoso, en particular salchichas, con un bastidor de soporte , una instalación de cierre […]
Dispositivo y procedimiento para el atado de una masa introducida en una piel, del 2 de Octubre de 2019, de INOTEC GMBH MASCHINENENTWICKLUNG UND VERTRIEB: Dispositivo para el atado de varias raciones de una masa introducida en una piel en lugares de atado previstos para ello, con un hilo , el dispositivo incluyendo […]
 Un producto alimenticio de tipo salchicha que comprende una abertura central y su método de preparación, del 25 de Septiembre de 2019, de Circle B Enterprises Holding Company, Inc: Producto alimenticio que comprende:
un cuerpo principal generalmente cilíndrico;
una abertura central abarcada por dicho cuerpo principal; y
al menos […]
Un producto alimenticio de tipo salchicha que comprende una abertura central y su método de preparación, del 25 de Septiembre de 2019, de Circle B Enterprises Holding Company, Inc: Producto alimenticio que comprende:
un cuerpo principal generalmente cilíndrico;
una abertura central abarcada por dicho cuerpo principal; y
al menos […]
Tira de grapas, del 7 de Agosto de 2019, de LORENZO NOGUERA,SAGAR: Tira de grapas, que comprende una sucesión de grapas configuradas de forma general en U, yuxtapuestas y relacionadas entre sí de forma separable […]
Grapa de cierre con base redonda y carrete con una sarta formada por pinzas de cierre, del 5 de Junio de 2019, de POLY-CLIP SYSTEM GMBH & CO. KG: Grapa de cierre para productos en forma de saco o embutido, cuyo material de funda de empaquetado está formado por al menos una lámina de empaquetado, […]
Cierre de extremo para un envoltorio de colágeno comestible y un procedimiento para obtener el mismo, del 8 de Mayo de 2019, de Viscofan Technology (Suzhou) Co., Ltd: Envoltorio tubular para alimentos realizado de una película de colágeno comestible, que tiene un cierre de extremo; dicho cierre de extremo consiste en una longitud de dicho […]
Conjunto de freno de envoltura, del 28 de Marzo de 2019, de POLY-CLIP SYSTEM GMBH & CO. KG: Un conjunto de freno de envoltura para aplicar una fuerza de fricción a una envoltura de embalaje tubular o con forma de bolsa (M) que está […]