Vehículo sumergible operado de forma remota.
Un vehículo sumergible operado de forma remota comprende,
un cuerpo externo (1) que comprende un puerto de carga (11),
un eje central (22), un puerto de cabo de control (12), los cuerpos de carcasa (13), propulsores (14), una ventana de visualización (15), un soporte de cabo (16) y juntas tóricas de estanqueidad de ventanas (17);
un cuerpo interno (2) que comprende un bastidor interno (21), un servomotor de cabeceo (23), un tren del eje de cabeceo (24), un servomotor de la cámara (25), un tren de la cámara (26), un brazo de la cámara (27), un montaje del eje de la cámara (28), una luz de inundación (29), una videocámara (30), una montaje del brazo de la cámara (31), un circuito de control (32), paquetes de baterías (33) y juegos de pesas (34);
el vehículo sumergible operado de forma remota que tiene un centro de flotabilidad (3);
el cuerpo externo (1) que tiene un primer centro de gravedad (18) situado en una misma ubicación que el centro de flotabilidad (3);
el cuerpo interno (2) que tiene un segundo centro de gravedad (35) fijo y verticalmente hacia abajo en relación con el centro de flotabilidad (3) independientemente de la orientación de cabeceo del cuerpo externo (1); y el vehículo sumergible operado de forma remota que tiene un centro de gravedad determinado por el primer centro de gravedad (18) y el segundo centro de gravedad (35) basado en los pesos del cuerpo externo (1) y del cuerpo interno (2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12153107.
Solicitante: Lotz, Jeffrey Paul.
Nacionalidad solicitante: Canadá.
Dirección: 3078 Greenfield Road Ayr, Ontario N0B 1E0 CANADA.
Inventor/es: LOTZ,JEFFREY PAUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63C11/48 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
- B63G8/00 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
PDF original: ES-2527039_T3.pdf
Fragmento de la descripción:
Vehículo sumergible operado de forma remota Campo de la invención
La presente invención se refiere, en general, a un mecanismo para regular el cabeceo de un vehículo submarino, y más particularmente, a un mecanismo que está contenido completamente dentro del cuerpo del vehículo, tal como se conoce a partir del documento W08900527.
Antecedentes de la invención
La presente invención mejora la técnica anterior mediante el empleo de la utilización de tan solo dos propulsores y un mecanismo interno utilizado para controlar el cabeceo desde el interior de la carcasa del sumergible. No se requiere ningún sistema de lastre, sistema de timón o propulsores adicionales, ahorrando en complejidad y dinero al tiempo que se mejora la fiabilidad. Los ejes de salida a través de juntas giratorias o acopladores magnéticos se minimizan a tan solo los dos propulsores esenciales, minimizando los puntos de fuga. El sumergible adquiere un perfil circular, cuando es observado desde el lateral. Un eje atraviesa el sumergible en el centro en el eje de cabeceo que se fija a la carcasa externa que retiene los propulsores. Desde este eje el bastidor del sumergible cuelga con todos los componentes esenciales y cualquier peso adicional requiere la obtención de flotabilidad deseada. Un motor tal como un servomotor se monta en el bastidor y se acopla a un engranaje, piñón o polea que se fija en el eje central. Cuando se activa, el motor hace girar la cubierta del sumergible junto con los propulsores para el cabeceo deseado, mientras que el bastidor interno permanece bajo. Este sistema permite el uso de componentes de bajo coste convencionales para regular el cabeceo mientras permanece de forma segura en el interior de los confines del sumergible. El centro de gravedad del sumergible no necesita coincidir en el mismo punto como el centro de flotabilidad. Sin embargo, como con cualquier otro sumergible, el centro de gravedad debe estar por debajo del centro de flotabilidad con el fin de tomar ventaja del equilibrio y del momento adrizante natural utilizado para permanecer estable. Una ventaja adicional de esta configuración permite que una cámara y un reflector se monten en el eje central y giren independientemente del cuerpo alrededor de una ventana de anillo central. Si el bastidor interno lo permite, la cámara podría tener, potencialmente, un campo de visión de 360 grados sin obstáculos alrededor del eje de cabeceo.
Breve descripción de los dibujos
La Figura 1 es una vista en perspectiva de la presente invención que muestra los seis grados de libertad.
La Figura 2 es una vista lateral izquierda que muestra el cabeceo de la presente invención hacia abajo en 90 grados con el centro de gravedad del sumergible permaneciendo en la misma posición en relación con el centro de flotabilidad.
La Figura 3 es una vista lateral izquierda que representa el cabeceo de la presente invención hacia abajo en 45 grados con el centro de gravedad del sumergible permaneciendo en la misma posición en relación con el centro de flotabilidad.
La Figura 4 es una vista frontal que muestra un plano sobre el que se toma una vista en sección y que se muestra en la Figura 12. El diagrama muestra la posición relativa del centro de gravedad del sumergible con respecto al centro de flotabilidad.
La Figura 5 es una vista frontal del sumergible que muestra el momento adrizante que actúa para restablecer el equilibrio con lo que el sumergible regresa a una posición vertical.
La Figura 6 es una vista interior en perspectiva de la presente invención con exclusión de un lado del cuerpo externo y de la ventana de visualización.
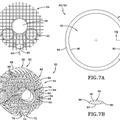
La Figura 7 es una vista en planta superior de la presente invención con exclusión de la ventana de visualización
para mostrar el cuerpo interno.
La Figura 8 es la vista lateral interior de los cuerpos de carcasa mostrando el primer centro de gravedad del cuerpo externo.
La Figura 9 es una vista lateral que muestra el segundo centro de gravedad del cuerpo interno.
La Figura 10 es una vista posterior que muestra el soporte de cabo, el puerto de carga y el puerto de cabo de control de la presente invención.
La Figura 11 es una vista en perspectiva del bastidor interno de la presente invención.
La Figura 12 es una vista lateral derecha de la hélice mostrando los componentes y mecanismos implicados con los propulsores. El área fuertemente sombreada representa los imanes en acoplamiento magnético. Los imanes se disponen en el acoplamiento dentro del seguidor y la unidad de accionamiento de control de manera similar a un diseño de bala y revólver. Este tipo de diseño no requiere el uso de imanes de forma personalizada ni de cualquier pegamento especial para sujetar los imanes en su lugar.
La Figura 13 es una vista en perspectiva de los componentes involucrados con la presente invención que permite al usuario controlar el sumergible de forma remota.
Descripción detallada de la invención
Todas las ilustraciones de los dibujos tienen la finalidad de describir las versiones seleccionadas de la presente invención y no pretenden limitar el alcance de la presente invención.
Haciendo referencia a la Figura 1, la presente invención es un cuerpo sumergible que posee la capacidad de permanecer estable mientras cabecea. En la arquitectura naval, los términos avance o retroceso, deriva y arfada representan la traslación a lo largo de los tres ejes de un buque, mientras que el balanceo, cabeceo y guiñada representan el giro angular sobre esos ejes. El cabeceo y arfada es la libertad de un sumergible de moverse en el plano vertical lo que lo diferencia de un buque de superficie. Será este movimiento y, más específicamente, el uso de cabeceo, para moverse verticalmente en la presente invención.
La estabilidad es la propiedad de un cuerpo que hace que el mismo desarrolle fuerzas, que trabajan para hacerlo volver a la posición original cuando es alterado desde una condición de equilibrio. Cuando las fuerzas y momentos resultantes que actúan sobre un vehículo submarino son cero, se dice que está en un estado de equilibrio. Los dos factores naturales que determinan la estabilidad de un vehículo sumergido es la relación posicional entre el centro de flotabilidad y el centro de gravedad, junto con la magnitud de la masa efectiva. El centro de flotabilidad (COB) es el centro geométrico del volumen del agua desplazada. El centro de gravedad (COG) es el centro efectivo de masa del sumergible. Con el fin de flotar de forma neutra, el sumergible debe tener una masa igual a la del agua en la que se está desplazando. Con el fin de ganar estabilidad, el COG del sumergible 4 debe estar lo más lejos del COB 3 como sea posible. Como se muestra en la Figura 2, en la Figura 3, y en la Figura 4, en el caso de la presente invención, así como en la gran mayoría de sumergibles, el COG del sumergible 4 se encuentra en la parte inferior del vehículo. Con cualquier distancia entre estos dos puntos, el sumergible se moverá naturalmente hacia el equilibrio, lo que sitúa el COG del sumergible 4 directamente debajo del COB 3 debido a las fuerzas de la gravedad. Este es el momento adrizante natural lo que proporciona estabilidad al sumergible. Ilustrado en la Figura 5, la magnitud del momento adrizante se determina por la masa del sumergible situado en el COG sumergible 4 multiplicada por su distancia, M, a partir de un eje que pasa por el COB 3 en la dirección en la que está actuando la gravedad.
Haciendo referencia a la Figura 6 y a la Figura 10, la presente invención comprende de dos estructuras principales, que incluyen un cuerpo externo 1 y un cuerpo interno 2. El cuerpo externo 1 se compone de un puerto de carga 11, un puerto de cabo de control 12, los cuerpos de carcasa 13, los propulsores 14, una ventana de visualización 15, un soporte de cabo 16, juntas tóricas de estanqueidad de ventanas 17, y un eje central 22. Los cuerpos de carcasa 13 y la ventana de visualización 15 definen, juntas, la estructura del cuerpo externo general 1. Los cuerpos de carcasa 13 tienen perfiles circulares y forman parte de un montaje de propulsores 131, un collarín de protección de hélice 132, las protecciones de hélice 133, y puertos de cierres de estanqueidad 134. El perfil frontal del sumergible debe ser simétrico a través del plano X-Y para equilibrar la resistencia en el área frontal del sumergible. Con los propulsores en línea con el centro de resistencia, ningún momento se induce en el sumergible. Hay simetría a través del plano X- Z con el fin de permitir la guiñada del sumergible alrededor del eje Z a través de la variación de la cantidad de empuje de los propulsores opuestos 14. La ventana de visualización 15 es un tubo transparente del mismo tamaño y... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo sumergible operado de forma remota comprende,
un cuerpo externo (1) que comprende un puerto de carga (11), un eje central (22), un puerto de cabo de control (12), los cuerpos de carcasa (13), propulsores (14), una ventana de visualización (15), un soporte de cabo (16) y juntas tóricas de estanqueidad de ventanas (17);
un cuerpo interno (2) que comprende un bastidor interno (21), un servomotor de cabeceo (23), un tren del eje de cabeceo (24), un servomotor de la cámara (25), un tren de la cámara (26), un brazo de la cámara (27), un montaje del eje de la cámara (28), una luz de inundación (29), una videocámara (30), una montaje del brazo de la cámara (31), un circuito de control (32), paquetes de baterías (33) y juegos de pesas (34); el vehículo sumergible operado de forma remota que tiene un centro de flotabilidad (3);
el cuerpo externo (1) que tiene un primer centro de gravedad (18) situado en una misma ubicación que el centro de flotabilidad (3);
el cuerpo interno (2) que tiene un segundo centro de gravedad (35) fijo y verticalmente hacia abajo en relación con el centro de flotabilidad (3) independientemente de la orientación de cabeceo del cuerpo externo (1); y el vehículo sumergible operado de forma remota que tiene un centro de gravedad determinado por el primer centro de gravedad (18) y el segundo centro de gravedad (35) basado en los pesos del cuerpo externo (1) y del cuerpo interno (2).
2. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 1 comprende,
los cuerpos de carcasa (13) que tienen un perfil circular y que comprenden un montaje de propulsores (131), un collarín de protección de la hélice (132), protectores de hélice (133) y puertos de cierres de estanqueidad (134); cada uno de los propulsores comprendiendo un par magnético (141), una hélice (142), un motor de accionamiento (143), y una cubierta de acoplamiento del eje (144);
el montaje de propulsores (131) sobresaliendo lateralmente, centrado verticalmente y dispuesto en relación
horizontal con respecto a los cuerpos de carcasa (13);
estando los propulsores introducidos en el montaje de propulsores (131);
la hélice (142) sobresaliendo del montaje de propulsores (131) por un eje de la hélice (142a) y estando envuelto por el collarín de protección de la hélice (132);
comprendiendo el par magnético (141) una unidad de accionamiento de control (141a), un seguidor (141b), una barrera (141c) y una junta tórica de estanqueidad de propulsores (141 d);
asegurándose los propulsores en el montaje de propulsores (131) en la barrera (141c) por medio de cierres de empuje (503); y
estando situada la junta tórica de estanqueidad de propulsores (141 d) entre el montaje de propulsores (131) y la barrera (141c) evitando fugas de agua en el sumergible operado de forma remota.
3. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 1 comprende,
el bastidor interno (21) compuesto de un montaje de placa de circuito (211), un montaje del servo de la cámara (212), un montaje del servo de cabeceo (213), un montaje de batería (214), un tope mecánico (216) y un montaje del bastidor del eje (215);
el bastidor interno (21) colgando hacia abajo desde y siendo capaz de pivotar alrededor del eje central (22) por el montaje del bastidor del eje (215);
el eje central (22) conectado y colocado en relación concéntrica con respecto a los cuerpos de carcasa (13); estando fijado el servomotor de cabeceo (23) sobre el montaje del servo de cabeceo (213) por medio de sujetadores del servo de cabeceo (504); y
estando conectado el servomotor de cabeceo (23) al eje central (22) por el tren del eje de cabeceo (24).
4. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 2 comprende,
la ventana de visualización (15) que es una estructura tubular transparente de igual radio en relación con los cuerpos de carcasa (13);
estando situada la ventana de visualización (15) entre los cuerpos de carcasa (13); la junta tórica de estanqueidad de ventanas (17) estando situada entre y sellando los cuerpos de carcasa (13) con la ventana de visualización (15);
y
estando sujetados entre sí los cuerpos de carcasa (13) y la ventana de visualización (15) en los puertos de cierre de estanqueidad (134) por medio de cierres de estanqueidad (502).
5. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 2 comprende,
la unidad de accionamiento de control (141a) estando conectada al motor de accionamiento (143) y sellada dentro del montaje de propulsores (131) por la barrera (141c) y por la junta tórica de estanqueidad de propulsores (141 d); estando envuelta la unidad de accionamiento de control (141 a) por la barrera (141c);
estando conectado el motor de accionamiento (143) al circuito de control (32) y sellado dentro del montaje de propulsores (131);
estando compuesto el seguidor (141b) de un alojamiento de rodamiento de agua de hélice (141b.1) y una junta tórica estática (141 b.2);
envolviendo el seguidor (141b) la barrera (141c);
estando fijado el eje de la hélice (142a) al alojamiento del acuífero de la hélice (141b.1);
estando situada la junta tórica estática (141b.2) entre el eje de la hélice (142a) y el alojamiento del acuífero de la hélice (141 b.1);
la cubierta de acoplamiento del eje (144) envolviendo el seguidor (141b) y el eje de la hélice (142a); y
los protectores de hélice (133) siendo estructuras nervadas que encierran la hélice (142) en el collarín de protección
de la hélice (132).
6. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 4 comprende,
estando situado el puerto de carga (11) adyacente al collarín de protección de la hélice (132) y la ventana de visualización (15);
estando situado el puerto de cabo de control (12) adyacente al collarín de protección de la hélice (132) y a la ventana de visualización (15); y
el soporte de cabo (16) estando fijado a los cuerpos de carcasa (13) por sujetadores de soporte del cabo (501) y situado entre el puerto de carga (11) y el puerto de cabo de control (12).
7. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 3 comprende,
el circuito de control (32) que está fijado al montaje de placa de circuito (211) por medio de sujetadores de placa de circuito (506);
el paquete de baterías (33) y el juego de pesas (34) que están fijados sobre el montaje de batería (214);
los propulsores (14) que están conectados al circuito de control (32);
la videocámara (30) que está conectada al circuito de control (32);
la luz de inundación (29) que está conectada al circuito de control (32);
el servomotor de cabeceo (23) que está conectado al circuito de control (32);
el servomotor de la cámara (25) que está conectado al circuito de control (32);
el puerto de carga (11) que está conectado al circuito de control (32);
el puerto de control de cabo (12) que está conectado al circuito de control (32); y el paquete de baterías (33) que está conectado y proporciona alimentación al circuito de control (32).
8. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 3 comprende,
el servomotor de la cámara (25) que está fijado sobre el montaje del servo de la cámara (212) por medio de sujetadores del servo de la cámara (505);
el montaje del eje de la cámara (28) que está conectado a y siendo capaz de pivotar alrededor del eje central (22); el brazo de la cámara (27) que está conectado al montaje de la cámara;
el servomotor de la cámara (25) que está conectado al montaje del eje de la cámara (28) por el tren de la cámara (26);
la luz de inundación (29) y la videocámara (30) que están fijadas en el brazo de la cámara (27) por el montaje del brazo de la cámara (31); y
siendo el tren de la cámara (26) un mecanismo de transferencia de movimiento angular seleccionado del grupo que consiste en un conjunto de engranajes, un sistema de correa y polea o un sistema de cadena y piñón.
9. El vehículo sumergible operado de forma remota de acuerdo con la reivindicación 6 comprende, un juego de pesas de flotabilidad (5);
un dispositivo de carga (6); un cabo de control (7); un controlador de cojincillo (8); un par de gafas de vídeo (9); y un receptor de vídeo (10).
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
Un dispositivo de limpieza de superficie, del 17 de Junio de 2020, de HullWiper Limited: Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Conjunto de batería para submarino, del 15 de Abril de 2020, de NAVAL GROUP: Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo […]
 Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Dispositivo de elevación para un submarino, del 8 de Enero de 2020, de ThyssenKrupp Marine Systems GmbH: Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]