EQUIPO PARA CONTROLAR AUTOMÁTICAMENTE LA DIRECCIÓN DE UN VEHÍCULO.
Equipo para controlar automáticamente la dirección de un vehículo,
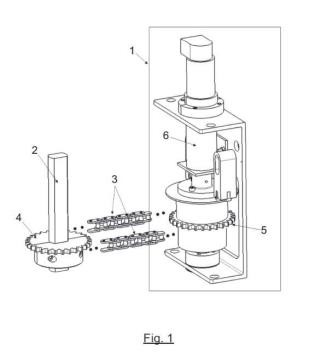
que comprende un motor eléctrico (6) que va relacionado con la columna (2) de la dirección a través de una transmisión mecánica, un embrague electromagnético que va dispuesto entre el eje del motor eléctrico (6) y la transmisión mecánica, y medios de control automático del motor eléctrico y electroimán (12).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330627.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: NARANJO HERNANDEZ,JOSE EUGENIO, JIMÉNEZ ALONSO,Felipe, GONZALEZ CAMPA,Miguel, GOMEZ CASADO,Oscar.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
Fragmento de la descripción:
EQUIPO PARA CONTROLAR AUTOMÁTICAMENTE LA DIRECCIÓN DE UN VEHÍCULO
CAMPO DE LA INVENCIÓN.
La presente invención se refiere a un equipo que permite controlar la dirección de un vehículo desde un controlador, sin intervención del conductor, mediante la automatización del volante.
Constituye un dispositivo incorporado a vehículos a motor que se encuadra en el sector de la ingeniería de vehículos de carretera a motor y es una herramienta diseñada para proporcionar un sistema integrado al vehículo que permite ayudar al conductor en la realización de maniobras de forma segura, tanto como asistencia ante situaciones de riesgo como en conducción autónoma.
ANTECEDENTES DE LA INVENCIÓN.
El número de accidentes de tráfico y los muertos y lesionados que se producen en la carretera han venido estimulando, tanto por parte de los gobiernos como de los fabricantes de automóviles, la búsqueda de soluciones para reducir este problema. En el año 2010, solo en Estados Unidos, se produjeron 42.527 accidentes de tráfico, de los cuales 33.877 (79.6%) están directamente relacionados con conductas indebidas del control lateral del vehículo tales como atropellos, salidas de carril, alcances traseros, cambios de carril o choques en ángulo (Fatality Analysis Reporting System, National Center for Statistics&Analysis, US DOT). Evitar este tipo de accidentes es el objetivo fundamental de los Sistemas Avanzados de Asistencia a la Conducción (ADAS) [S. Kato, N. Minobe, S. Tsugawa (2004). Driver-adaptive driver assistance system based on precise navigation, environment sensing and driver monitoring: system proposal and experiments. FISITA World Automotive Congress, Barcelona, 23-27 Mayo 2004], cuyo objetivo es el desarrollo de herramientas tecnológicas que puedan ser implantadas en los vehículos de carretera a fin de ayudar al conductor y, en algunos casos, tomar el control del vehículo en determinadas situaciones. Así, nos encontramos con sistemas que pueden tomar el control de los dos actuadores fundamentales de un automóvil: el volante y la velocidad, también denominados control lateral y control longitudinal respectivamente. En lo que respecta al aparato objeto de esta invención nos centraremos fundamentalmente en los sistemas de asistencia a la conducción basados en actuación sobre el control lateral del vehículo.
Tradicionalmente, la dirección asistida de un vehículo utiliza una bomba hidráulica para facilitar su manejo por parte del conductor, disminuyendo el par que es necesario efectuar sobre el volante para mover las ruedas. Dicha bomba hidráulica general presión que es regulada por una válvula situada al final de la barra de dirección, que se abrirá en un sentido u otro según el movimiento del volante, generando la asistencia deseada [patentes ES2229111 - Sistema de bombeo con una bomba hidráulica, en particular para un sistema de dirección - y ES 2303673 - Servodirección hidráulica -, entre otras]. Este tipo de direcciones asistidas son las más comunes y equipadas por la mayoría de los vehículos automóviles. No obstante, en algunos coches modernos, este sistema hidráulico ha sido sustituido por un sistema electromecánico, compuesto por un motor eléctrico acoplado en algún punto de la dirección y un sensor de par instalado en la columna de dirección [W. Ijiri y T. Tsutsui, "Technical Trends of Electric Power Steering Systems", Koyo Engineering journal English Edition, n° 162E, 2003; y patente ES2337837 - Procedimiento de control de un motor eléctrico de un dispositivo de asistencia de dirección de vehículo, y dispositivo de asistencia asociado]. Este sensor de par calcula el par que está ejerciendo el conductor en cada momento para girar el volante, enviando una señal electrónica al motor, que asistirá este par del conductor con un par adicional, proporcional al medido por el sensor.
Los sistemas de asistencia activa a la dirección de los vehículos se llevan estudiando desde hace más de 30 años, como se muestra en el trabajo de Kasselmann y Keranen [J. Kasselmann y T. Keranen, "Adaptive Steering", Bendix Technical Journal, vol. 2, pp. 26-35, 1969], en el que se desarrolló un sistema de control activo que mide el error angular de las ruedas del vehículo respecto de la posición deseada por el conductor, mediante un giróscopo y utiliza realimentación proporcional para generar una salida incremental para manejar el volante. Este estudio nunca se convirtió en un producto comercial, pero la idea central que postulaba el manejo automático de la dirección, de forma parcial o total, aún se mantiene vigente.
Las soluciones adoptadas para la automatización de la dirección han sido tradicionalmente diferentes en función del tipo de asistencia que tuviese el vehículo.
Así, para los vehículos que no disponen de dirección asistida eléctrica es necesario el acoplamiento de algún tipo de dispositivo, habitualmente motores eléctricos, en algún punto de la dirección del vehículo a fin de proceder a su automatización o, al menos, permitir su control desde un sistema externo. En [R. García, T. de Pedro, J.E. Naranjo, J. Reviejo, C.
González, "Frontal and Lateral Control for Unmanned Vehicles in Urban Tracks", IEEE
Intelligent Vehicles Symposium, Versailles, France, 2002], [J.E. Naranjo, C. González, R. García, T. de Pedro, R.E. Haber, "Power-Steering Control Architecture for Automatic Driving", IEEE Transactions on Intelligent Transportation Systems, vol. 6, n° 4, December 2005, pp. 406-415] y [J.E. Naranjo, C. González, R. García, T. de Pedro, "ACC+Stop&Go Maneuvers With Throttle and Brake Fuzzy Control", IEEE transactions on Intelligent Transportation Systems, vol. 7, n° 2, Junio 2006, pp. 213-225] se describen los trabajos en automatización y control de una dirección asistida hidráulicamente utilizando un motor eléctrico acoplado a la barra de dirección mediante un engranaje, que se engrana y desengrana utilizando la regulación en altura el propio volante.
En trabajos llevados a cabo por el grupo VisLab de la Universidad de Parma, se ha desarrollado un sistema de control de la dirección de un coche que se basa en un sencillo controlador analítico proporcional, optimizado para el seguimiento de rutas, que maneja el volante mediante un motor acoplado a la barra de dirección mediante una polea [A: Broggi et al., "The ARGO Autonomous Vehicles Vision and Control Systems", International Journal of Intelligent Control and Systems, Vol. 3, n° 4, pp. 409-441, 1999], el cual se acopla y desacopla manualmente.
En Estados Unidos, dentro del programa California PATH, se desarrolla un enfoque similar [T. Hessburg and M. Tomizuka, "Fuzzy Logic Control for Lateral Vehicle Guidance", IEEE Control Systems, Agosto, 1994], donde se realiza un control de la dirección basado en control borroso, cuya automatización se ha realizado mediante un motor eléctrico acoplado a una polea y engranaje y desengranaje manual.
Otro desarrollo experimental se presenta en [G. Meier et al., "Automatic Lateral Vehicle Guidance Using Tracking Control", IEEE Intelligent Vehicles Symposium, University of Parma, Italia, pp. 145-149, 2004], donde se describe el diseño e implementación de un control lateral automático instalado en un Audi A8. La adquisición de datos se hace mediante visión artificial y la actuación con un motor acoplado a la barra de dirección.
En la patente [ES2262884 - Mecanismo de dirección con un sistema de engranaje epicicloidal propulsado para la producción de un par motor manual específico sobre el volante] se presenta un sistema basado en motores eléctricos para asistir el movimiento del volante de un vehículo automóvil.
De forma similar, en la patente [US6768944 (B2) - Method and system for controlling a
vehicle] se reivindica un sistema para automatizar la conducción de un vehículo mediante,
entre otras cosas, la instalación de un servomotor acoplado a la dirección del vehículo, pero sin ningún detalle adicional sobre el montaje o características técnicas al respecto. Esto mismo ocurre en las patentes [DE19709319 (A1) - Motor vehicle controlling method], [JP10250417 (A) - Control method of vehicle and device thereof] y [US6154688 (A) - Method and arrangement for controlling a vehicle].
Aquellos vehículos con asistencia eléctrica de la dirección no requieren de un aparato mecánico específico para su control automático, sino un nuevo controlador adicional que envíe las señales oportunas al sistema de asistencia en vez de controlador convencional del vehículo, cuya señal no se considera en caso de disponer de la primera [J.E. Naranjo, F. Jiménez, O. Gómez, J.G. Zato (2012). Low level control layer definition for autonomous vehicles based on fuzzy logic. Intelligent Automation and Soft...
Reivindicaciones:
1.- Equipo para controlar automáticamente la dirección de un vehículo, con independencia 5 del tipo de asistencia que tenga la dirección, que comprende un motor eléctrico (6), que va
relacionado con la columna (2) de la dirección a través de una transmisión mecánica, caracterizado por que comprende un embrague electromagnético, que va dispuesto entre el eje del motor eléctrico y la transmisión mecánica, y medios de control automático del motor eléctrico (6) y electroimán (12), cuyos medios incluyen una centralita (25) que procesa 10 señales procedentes del giro de volante y señales procedentes del vehículo y genera órdenes de funcionamiento para el motor eléctrico (6) y órdenes de activación y desactivación para el embrague electromagnético.
2.- Equipo según reivindicación 1, caracterizado por que la transmisión mecánica comprende una primera corona dentada (4), que va montada sobre la columna de dirección
(2), y una segunda corona dentada (5) que va montada en un eje (11) coaxial e
independiente del eje (6') del motor (6), cuyas primera y segunda ruedas dentadas van relacionadas entre sí para la transmisión del giro entre una y otra; y por que el embrague electromagnético va dispuesto entre el eje (6') del motor eléctrico (6) y el eje (11) de la segunda corona dentada (5).
3.- Equipo según reivindicación 2, caracterizado por que el embrague electromagnético está
compuesto por un núcleo ferromagnético integrado en la segunda corona dentada (5), y un electroimán (12) coaxialmente solidario del eje (6') del motor (6); cuyo núcleo y electroimán (12) van dispuestos en posiciones enfrentadas y próximos entre sí, separados una pequeña distancia que se elimina para asegurar la transmisión del giro entre el eje (6') del motor (6) y 25 la segunda rueda dentada (5), al activar el electroimán (12).
4.- Equipo según reivindicación 2, caracterizado por que las dos coronas dentadas (4 y 5) van relacionadas mediante una cadena de transmisión (3).
5.- Equipo según reivindicación 2, caracterizado por que las dos coronas dentadas engranan directamente entre sí.
6.- Equipo según reivindicación 2, caracterizado por que el electroimán (12) del embrague electromagnético está alimentado a través de una banda circular (17) conductora solidaria de dicho electroimán, sobre la que hace contacto, al menos, una escobilla (18) fija.
7.- Equipo según reivindicación 1, caracterizado por que los medios de control incluyen un 5 encoder (26) asociado al volante, el cual genera las señales de giro de dicho volante para la
centralita (25).
8.- Equipo según reivindicación 1, caracterizado por que los medios de control incluyen un relé de conmutación (28) para el electroimán (12), a través del que se transmiten a dicho electroimán las órdenes de funcionamiento procedentes de la centralita (25).
9.- Equipo según reivindicación 1, caracterizado por que los medios de control incluyen un
controlador (30) para el motor eléctrico (6) y un encoder (7) asociado a dicho motor, cuyo controlador recibe las órdenes de la centralita (25) así como las señales del encoder (7) de dicho motor.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]