Aplicador de pinzas quirúrgicas.
Un aplicador de pinzas quirúrgicas (10) que comprende:
una carcasa (12);
un gatillo (16) acoplado con 5 la carcasa (12);
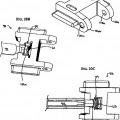
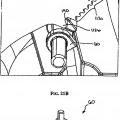
un ensamblaje de avance de pinzas (30, 34, 38) y un ensamblaje de formación de pinzas (42, 44) dispuesto dentro de la carcasa (12), el ensamblaje de avance de pinzas (30, 34) conteniendo una barra alimentadora (38); un ensamblaje de mandíbulas (20) formado en un extremo distal de la carcasa (12); y
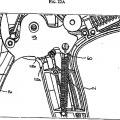
una conexión alimentadora (52) conectada entre la barra alimentadora (38) y el gatillo (16);
en el que el movimiento del gatillo (16) una primera distancia hacia la posición cerrada acciona el ensamblaje de avance de pinzas (30, 34, 38) donde la barra alimentadora (38) hace avanzar una pinza (36) en el ensamblaje de mandíbulas (20) y la barra alimentadora (38) alcanza su posición más distal;
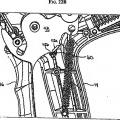
caracterizado porque la conexión alimentadora (52) está configurada para flexionarse bajo movimiento adicional del gatillo (16) hacia la posición cerrada mientras permanece conectada entre la barra alimentadora (38) y el gatillo (16), que a su vez permite al gatillo (16) continuar moviendose una segunda distancia hacia la posición cerrada para accionar el ensamblaje de formación de pinzas (42, 44) mientas la barra alimentadora (38) está en su posición más distal, formando de esta manera la pinza (36) dispuesta dentro del montaje de mandíbulas (20).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10179743.
Solicitante: ETHICON ENDO-SURGERY, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 4545 Creek Road Cincinnati, OH 45242 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KOCH, ROBERT L., HUITEMA, THOMAS W., VITALI, DARIO, FUCHS, RICHARD P., DAVISON, MARK A., Molitor,Nicholas G, Larson,Kevin A, Bertke,Brian D.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/10 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para poner o quitar los clamps para heridas; Cargadores de clamps para heridas.
- A61B17/122 A61B 17/00 […] › Clamps o pinzas.
- A61B17/128 A61B 17/00 […] › para aplicar o quitar clamps o pinzas.
- A61B19/00
PDF original: ES-2509916_T3.pdf
Fragmento de la descripción:
Aplicador de pinzas quirúrgicas Descripción Campo de la invención La presente invención se refiere en general a dispositivos quirúrgicos y, en particular, a dispositivos para aplicar pinzas quirúrgicas a conductos, vasos, derivaciones, etc.
Antecedentes de la invención En los últimos años, la cirugía ha avanzado notablemente mediante la realización de procedimientos quirúrgicos laparoscópicos y endoscópicos, tales como colecistectomías, gastrostomías, apendectomías y reparación de hernias. Estos procedimientos se realizan mediante un ensamblaje de trocar, que es un instrumento quirúrgico usado para perforar una cavidad corporal. El trocar típicamente contiene una punta obturadora afilada y un tubo o cánula de trocar. La cánula de trocar es insertada en la piel para acceder a la cavidad corporal, usando la punta obturadora para penetrar en la piel. Después de la penetración, el obturador es retirado y la cánula de trocar permanece en el cuerpo. Es a través de esta cánula que se colocan los instrumentos quirúrgicos.
Un instrumento quirúrgico que se usa habitualmente con una cánula de trocar es un aplicador de pinzas quirúrgicas para ligar un vaso sanguíneo, un conducto, derivación o una parte de tejido corporal durante la cirugía. La mayoría de los aplicadores de pinzas tienen, típicamente, un asa con un eje alargado que tiene un par de mandíbulas opuestas amovibles formadas en uno de sus extremos para sujetar y formar una pinza de ligadura entre ambas. Las mandíbulas se posicionan alrededor del vaso o conducto, y la pinza se aplasta o se forma sobre el vaso mediante el cierre de las mandíbulas.
En muchos de los aplicadores de pinzas de la técnica anterior, los mecanismos de suministro y formación requieren temporización precisa y movimiento coordinado de los componentes para funcionar. Esta necesidad de temporización y control precisos ha dado como resultado la necesidad de complejos diseños mecánicos, aumentando de este modo el coste de los aplicadores de pinzas. Muchos aplicadores de pinzas de la técnica anterior también usan un ensamblaje de avance de pinzas accionado por resorte para hacer avanzar a una o más pinzas a través del eje del dispositivo. Como resultado, las mandíbulas deben contener un mecanismo para impedir la proyección accidental de la pinza desde el dispositivo antes de que la pinza se haya formado. Otros inconvenientes de los actuales aplicadores de pinzas incluyen la incapacidad de manejar una sobrecarga aplicada a las mandíbulas por el gatillo en diversas condiciones. Muchos dispositivos requieren el cierre completo de las mandíbulas, que puede dar como resultado una sobrecarga sobre las mandíbulas cuando el vaso o conducto posicionado entre ambas es demasiado grande para permitir el cierre completo, o cuando un objeto extraño está situado entre las mandíbulas.
El Documento EP 0769274 A1 describe un instrumento que aplica una pinza quirúrgica que incluye una porción de mango que tiene un primer mango y un segundo mango montador para movimiento relativo. Los mangos definen un recorrido de cierre único entre una posición abierta y una posición cerrrada. El instrumento que aplica la pinza incluye una porción de cuerpo que se extiende distalmente desde la porción del mango y que define un eje longitudinal, y una pila de pinzas quirúrgicas dispuestas dentro de la porción del cuerpo. Las pinzas se mueven deslizablemente a lo largo de una carcasa inferior por un empujador de pinzas configurado para moverse en relación a los toques del mango donde las pinzas son empujadas juntas por un conjunto de mordaza. Las pinzas quirúrgicas son mantenidas en una pila en la carcasa inferior. Un empujador de pinzas, activado por el recorrido de cierre de los mangos, hace avanzar una pinza en la pila de pinzas hacia el conjunto de mordaza. El conjunto de mordaza está montado en la porción del extremo distal de la porción del cuerpo y es movible entre una posición aproximada y una posición separada. Un mecanismo de control de la mordaza está configurado para mover el conjunto de mordaza a la posición separada para la recepción de la pinza más distal en respuesta al lanzamiento inicial de los mangos.
Por consiguiente, sigue existiendo una necesidad de procedimientos y dispositivos mejorados para aplicar pinzas quirúrgicas a vasos, conductos, derivaciones, etc.
Resumen de la invención La presente invención proporciona dispositivos para aplicar una pinza quirúrgica a un vaso, conducto, derivación, etc. Un aplicador de pinzas quirúrgicas de acuerdo con la presente invención se reivindica en la reivindicación añadida 1. CAracterísticas preferidas adicionales se definen en las reivindicaciones subordinadas añadidas.En una realización ejemplar, se proporciona un aplicador de pinzas quirúrgicas que tiene una carcasa con un gatillo acoplado, de forma que pueda moverse, a ésta y un eje alargado que se extiende desde ésta con mandíbulas opuestas formadas en un extremo distal del mismo. El gatillo está adaptado para hacer avanzar a una pinza para colocar a la pinza entre las mandíbulas, y para mover a las mandíbulas de una posición abierta a una posición cerrada para plegar a la pinza situada entre ambas.
El aplicador de pinzas quirúrgicas puede tener diversas configuraciones, y puede incluir diversas características para facilitar el avance y la formación de una pinza quirúrgica. En una realización, el aplicador de pinzas quirúrgicas puede incluir una zapata alimentadora que se dispone, de forma que pueda deslizarse, dentro del eje alargado y que está adaptada para impulsar a al menos una pinza quirúrgica a través del eje alargado. En una realización ejemplar, la zapata alimentadora puede estar adaptada para moverse solamente en una dirección distal, de modo que el movimiento proximal de la zapata alimentadora se impide sustancialmente. El eje alargado también puede incluir un carril para pinzas dispuesto en su interior y adaptado para asentar al menos a una pinza quirúrgica. La zapata alimentadora puede disponerse, de forma que pueda deslizarse, dentro del carril para pinzas.
Pueden usarse diversas técnicas para facilitar el movimiento distal e impedir el movimiento proximal de la zapata alimentadora. En una realización ejemplar, la zapata alimentadora puede incluir una espiga adaptada para acoplarse al carril para pinzas para impedir el movimiento proximal de la zapata alimentadora dentro del carril para pinzas, pero permitir el movimiento distal de la zapata alimentadora dentro del carril para pinzas. El carril para pinzas puede incluir varias aberturas formadas en su interior para alojar a la espiga para impedir el movimiento proximal de la zapata alimentadora dentro del carril para pinzas. En otra realización ejemplar, la zapata alimentadora puede incluir una espiga y la barra alimentadora puede incluir varios topes formados en su interior y adaptados para acoplarse a la espiga para mover a la zapata alimentadora distalmente cuando la barra alimentadora se mueve distalmente.
En otra realización, el eje alargado puede incluir una barra alimentadora dispuesta, de forma que pueda deslizarse, en su interior y acoplada al gatillo, de modo que el movimiento del gatillo hacia una posición cerrada está adaptado para hacer avanzar a la barra alimentadora distalmente haciendo avanzar de este modo a la zapata alimentadora distalmente. A modo de ejemplo no limitante, la barra alimentadora puede acoplarse al gatillo mediante un inserto de gatillo que está emparejado con el gatillo, y mediante una conexión que se extiende entre el inserto de gatillo y el extremo proximal de la barra alimentadora. El extremo proximal de la barra alimentadora puede incluir un acoplador que está adaptado para alojar a una parte de la conexión. La barra alimentadora también puede incluir un extremo distal que tiene un impulsor que está adaptado para acoplar una pinza más distal y para impulsar a la pinza más distal al interior de las mandíbulas. En algunas realizaciones ejemplares, la barra alimentadora puede estar adaptada para acoplarse a, e iniciar el avance de, una pinza más distal al interior de las mandíbulas antes de iniciar al avance de la zapata alimentadora.
En otra realización, se proporciona un ensamblaje de avance de pinzas para hacer avanzar a una pinza a través de un aplicador de pinzas quirúrgicas. El ensamblaje de avance de pinzas puede usarse con diversos aplicadores de pinzas quirúrgicas, incluyendo aquellos conocidos en la técnica. En una realización ejemplar, el ensamblaje de avance de pinzas puede incluir un carril para pinzas que está adaptado para asentar al menos a una pinza, y una zapata alimentadora que está adaptada para emparejarse, de forma que pueda deslizarse, con el carril para pinzas y para moverse en una dirección... [Seguir leyendo]
Reivindicaciones:
1. Un aplicador de pinzas quirúrgicas (10) que comprende: una carcasa (12) ;
un gatillo (16) acoplado con la carcasa (12) ; un ensamblaje de avance de pinzas (30, 34, 38) y un ensamblaje de formación de pinzas (42, 44) dispuesto dentro de la carcasa (12) , el ensamblaje de avance de pinzas (30, 34) conteniendo una barra alimentadora (38) ; un ensamblaje de mandíbulas (20) formado en un extremo distal de la carcasa (12) ; y una conexión alimentadora (52) conectada entre la barra alimentadora (38) y el gatillo (16) ;
en el que el movimiento del gatillo (16) una primera distancia hacia la posición cerrada acciona el ensamblaje de avance de pinzas (30, 34, 38) donde la barra alimentadora (38) hace avanzar una pinza (36) en el ensamblaje de mandíbulas (20) y la barra alimentadora (38) alcanza su posición más distal; caracterizado porque la conexión alimentadora (52) está configurada para flexionarse bajo movimiento adicional del gatillo (16) hacia la posición cerrada mientras permanece conectada entre la barra alimentadora (38) y el gatillo (16) , que a su vez permite al gatillo (16) continuar moviendose una segunda distancia hacia la posición cerrada para accionar el ensamblaje de formación de pinzas (42, 44) mientas la barra alimentadora (38) está en su posición más distal, formando de esta manera la pinza (36) dispuesta dentro del montaje de mandíbulas (20) .
2. El aplicador de pinzas quirúrgicas de la reivindicación 1, en el que el ensamblaje de formación de pinzas (42, 44) es flexible en relación al ensamblaje de mandíbulas (20) durante el accionamiento del mismo.
3. El aplicador de pinzas quirúrgicas de la reivindicación 2, en el que el ensamblaje de formación de pinzas (42, 44)
está en comunicación con un mecanismo de sobrecarga (62) que está adaptado para permitir el cumplimiento del 25 ensamblaje de formación de pinzas (42, 44) en relación al ensamblaje de mandíbulas (20) .
4. El aplicador de pinzas quirúrgicas de la reivindicación 3, en el que el ensamblaje de formación de pinzas (42, 44) está configurado para aplicar una fuerza de cierre al ensamblaje de mandíbulas (20) cuando el el ensamblaje de formación de pinzas (42, 44) es accionado, y en el que la fuerza de cierre es transferida al mecanismo de sobrecarga (62) cuando la fuerza de cierre es mayor que una fuerza umbral del mecanismo de sobrecarga (62) .
5. El aplicador de pinzas quirúrgicas de la reivindicación 1, en el que el ensamblaje de avance de pinzas (30, 34, 38) es accionable para provocar que la barra alimentadora (38) conduzca una pinza (36) más distal dispuesta dentro de un eje alargado (18) en el ensamblaje de amndíbulas (20) , y para conducir distalmente al menos una pinza (36)
adicional dispuesta dentro del eje alargado (18) .
6. El aplicador de pinzas quirúrgicas de la reivindicación 5, que comprende además una zapata alimentadora (34) dispuesta dentro del eje alargado (18) , en la que al menos una pinza (36) adicional es conducida distalmente por la zapata alimentadora (34) y la barra alimentadora (38) .
7. El aplicador de pinzas quirúrgicas de la reivindicación 6, en el que la barra alimentadora (38) está configurada para iniciar el avance de la pinza (36) más distal antes de iniciar el avance de la zapata alimentadora (34) .
8. El aplicador de pinzas quirúrgicas de la reivindicación 6, en el que la barra alimentadora (38) puede ser retraida
proximalmente dentro del eje alargado (18) mientras que la zapata alimentadora (34) se mantiene en una posición sustancialmente fija. .
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]