Aparato y procedimiento para determinar una correspondencia de una posición con una posición de referencia.
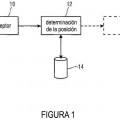
Un aparato (30) para determinar una correspondencia de una posición (21) con una posición de referencia (24),
en el que señales radioeléctricas de radiotransmisores estacionarios (22) pueden recibirse en la posición, que comprende:
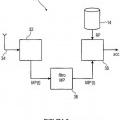
un medio de determinación (32) de una identificación de un cierto radiotransmisor (22e) y de determinación de una característica de señal de una señal radioeléctrica del cierto radiotransmisor en un primer momento (t1), en el que la identificación y la característica de señal de la señal radioeléctrica del cierto radiotransmisor representan al menos parte de un paquete de medición (MP) para la posición (21);
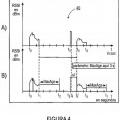
un medio de postprocesamiento (36) del paquete de medición (MP) para obtener un paquete de medición postprocesado (MP') para la posición (21), en el que el medio de postprocesamiento está implementado para sintetizar al menos temporalmente la característica de señal del cierto radiotransmisor, comenzando desde el primer momento (t1) hasta un segundo momento (t2) después del primer momento (t1), para el cual la identificación del cierto radiotransmisor (22e) no puede determinarse, cuando el primer momento (t1) era el último momento antes del segundo momento (t2) cuando la identificación del cierto radiotransmisor (22e) era determinable, donde un primer plazo de tiempo (Δt) es el tiempo entre el primer y el segundo momentos, siendo este primer plazo (Δt) mayor o igual a 0,5 segundos; y
un medio de comparación (38) del paquete de medición postprocesado (MP') con al menos un paquete de medición de referencia determinado previamente (RP) para la posición de referencia (24), para determinar la correspondencia
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/068228.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: MEYER, STEFFEN, HUPP, JURGEN, HAIMERL,STEPHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
PDF original: ES-2517341_T3.pdf

Fragmento de la descripción:
Aparato y procedimiento para determinar una correspondencia de una posición con una posición de referencia
[1] La presente invención se refiere a aparatos y procedimientos para determinar una correspondencia de
una posición con una posición de referencia, tal como puede usarse en particular para localizar o gobernar dispositivos terminales móviles en una red de comunicación inalámbrica.
[2] Para localizar dispositivos terminales móviles, están disponibles diferentes tecnologías de localización. 1 El sistema probablemente mejor conocido para localización o navegación en exteriores es el sistema de
posicionamiento global asistido por satélite (GPS). Para localización o navegación dentro de edificios o en interiores, se conocen diferentes estrategias, tales como, por ejemplo, sistemas infrarrojos, sistemas RFID o también evaluaciones de la intensidad del campo de redes IEE 82.11 WLAN (WLAN = red de área local inalámbrica). Actualmente, el sistema GPS está disponible de forma fiable solamente para exteriores. Las últimas extensiones, 15 tales como receptores altamente sensibles o el llamado A-GPS (GPS asistido) representan intentos de hacer a la tecnología también utilizable en el interior de edificios. El A-GPS combina el uso del sistema GPS basado en satélite con una recepción de la llamada información de asistencia procedente de redes de radio móviles celulares. Sin embargo, actualmente, estas tecnologías no tienen todavía las precisiones promedio deseadas. Sistemas infrarrojos y sistemas RFID generalmente no están disponibles con cobertura completa y están limitados a requisitos 2 específicos.
[3] Debido a la creciente distribución de redes de radio inalámbricas basadas, por ejemplo, en la norma WLAN, estas redes inalámbricas se ofrecen como la base para nuevos procedimientos de localización.
[4] Los procedimientos de localización habituales usados previamente se basan, por ejemplo, en la
triangulación, relaciones con el vecindario, lateración por medio de medición temporal o lateración por medio de evaluación de la intensidad del campo. Estos procedimientos son procedimientos de localización donde debe conocerse una posición de radiotransmisores estacionarios de estaciones base, o donde hay que realizar previamente capacitación en posiciones de referencia en un entorno que será cubierto mediante el procedimiento de 3 localización.
[5] En sistemas de localización a base de WLAN, frecuentemente, se usa la llamada "huella digital" (flngerprlnt) de Intensidad de señal recibida (RSS) como un procedimiento básico. Este procedimiento se basa en la suposición de que las Intensidades de señal de señales radloeléctrlcas de varias estaciones de radio recibidas o que
pueden recibirse en una ubicación actual caracterizan únicamente la ubicación actual o la posición actual. Si existe una base de datos de referencia, que incluye, para una serie de ubicaciones de referencia o posiciones de referencia, identificaciones de transmisor de estaciones de radio recibidas o que pueden recibirse allí en momentos de referencia, así como las intensidades de señal de las señales radioeléctricas correspondientes, la posición actual puede inferirse a partir de un conjunto de valores de medición actuales (identificación del transmisor y valores de 4 intensidad de señal asociados) mediante comparación entre valores de medición medidos actualmente y los valores de referencia de la base de datos. Esta comparación evalúa, para cada punto de referencia, lo similar que son sus valores de medición registrados previamente o valores de referencia a los valores de medición actuales de las posiciones actuales. El punto o puntos de referencia más similares se usan a continuación como base para un valor estimado para la ubicación actual del dispositivo terminal móvil.
[6] La intensidad de señal de un radiotransmisor que puede recibirse en una posición de referencia en un tiempo de medición de referencia se determina experimentalmente para una base de datos de referencia mediante una medición de referencia. Esto da como resultado una base de datos que incluye, para cada posición de referencia donde se ha realizado una medición de referencia, una lista de radiotransmisores (puntos de acceso) que
incluye las respectivas intensidad y calidad del campo recibido asociado. Esta lista también puede denominarse como paquete de referencia. Con una implementación WLAN, dicha base de datos de referencia puede incluir, por ejemplo, los siguientes parámetros:
| RID | MAC | RSSI | PGS | X | Y | Z | MAPNR | CREADO |
| .D.54.9E.17.81 | 4653 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .D.54.9E.1A.BA | 6726 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .D.54.9E.1D.64 | 722 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .E.6A.D3.B9.8B | 59531 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .F.A3.1.7.6C | 46464 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .F.A3.1.7.FB | 74488 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .F.A3.1.9.SF | 72375 | 5795 | 15627 | 12.3.7 12:42 | ||||
| .D.54.9E.17.81 | 54138 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .D.54.9E.18.1D | 7656 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .D.54.9E.1A.BA | 62318 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .D.54.9E.1D.64 | 71348 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .E.6A.D3.B9.8B | 45393 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .F.A3.1.7.6C | 66853 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .F.A3.1.7.FB | 72251 | 14399 | 15451 | 12.3.7 12:43 |
| .F.A3.1.9.5F | 799 | 14399 | 15451 | 12.3.7 12:43 | ||||
| .D.54.9E.17.81 | 58291 | 24583 | 15627 | 12.3.7 12:43 | ||||
| .D.54.9E.18.1D | 7861 | 24583 | 15627 | 12.3.7 12:43 | ||||
| .D.54.9E.1A.BA | 62153 | 24583 | 15627 | 12.3.7 12:43 | ||||
| .D.54.9E.1D.64 | 64187 | 24583 | 15627 | 12.3.7 12:43 | ||||
| .E.6A.D3.B9.8B | 32851 | 24583 | 15627 | 12.3.7 12:43 | ||||
| .F.A3.1.7.6C ... [Seguir leyendo]
Reivindicaciones:1. Un aparato (30) para determinar una correspondencia de una posición (21) con una posición de referencia (24) , en el que señales radioeléctricas de radiotransmisores estacionarios (22) pueden recibirse en la 5 posición, que comprende: un medio de determinación (32) de una identificación de un cierto radiotransmisor (22e) y de determinación de una característica de señal de una señal radioeléctrica del cierto radiotransmisor en un primer momento (t1) , en el que la identificación y la característica de señal de la señal radioeléctrica del cierto radiotransmisor representan al menos parte de un paquete de medición (MP) para la posición (21) ; un medio de postprocesamiento (36) del paquete de medición (MP) para obtener un paquete de medición postprocesado (MP') para la posición (21) , en el que el medio de postprocesamiento está implementado para sintetizar al menos temporalmente la característica de señal del cierto radiotransmisor, comenzando desde el primer momento (t1) hasta un segundo momento (t2) después del primer momento (t1) , para el cual la identificación del cierto radiotransmisor (22e) no puede determinarse, cuando el primer momento (t1) era el último momento antes del segundo momento (t2) cuando la identificación del cierto radiotransmisor (22e) era determinable, donde un primer plazo de tiempo (ât) es el tiempo entre el primer y el segundo momentos, siendo este primer plazo 20 (ât) mayor o igual a 0, 5 segundos; y un medio de comparación (38) del paquete de medición postprocesado (MP') con al menos un paquete de medición de referencia determinado previamente (RP) para la posición de referencia (24) , para determinar la correspondencia. 2. El aparato según la reivindicación 1, en el que el medio de postprocesamiento (36) está adaptado para asignar la característica de señal del cierto radiotransmisor (22e) recibida en un primer momento (t1) al cierto radiotransmisor (22e) dentro del primer plazo de tiempo (ât) después del primer momento (t1) . 3. El aparato según una de las reivindicaciones anteriores, que comprende además un medio para determinar un valor de frecuencia recibida, en base a una serie de identificaciones del cierto radiotransmisor (22e) determinadas dentro de un segundo plazo de tiempo (MaxAge) , que es un límite superior del primer plazo de tiempo (ât) , que indica en cuántas mediciones recibidas dentro del segundo periodo (MaxAge) podría recibirse una señal radioeléctrica del cierto radiotransmisor (2e) . 4. El aparato según la reivindicación 3, implementado para combinar el valor de frecuencia recibida determinado junto con la identificación y la característica de señal de la señal radioeléctrica del cierto radiotransmisor (22e) como al menos parte de un paquete de referencia para la posición (21) . 5. El aparato según una de las reivindicaciones anteriores, en el que el medio de postprocesamiento (36) comprende un medio de filtrado con un filtro de paso bajo digital de la característica de señal determinada de la señal radioeléctrica del cierto radiotransmisor (22e) para suavizar una forma de onda de la característica de señal determinada. 6. El aparato según la reivindicación 5, en el que el medio de filtrado con un filtro de paso bajo digital 45 comprende un filtro IIR de primer orden. 7. El aparato según una de las reivindicaciones anteriores, en el que la característica de señal de la señal radioeléctrica del cierto radiotransmisor (22e) comprende una característica de señal electromagnética de la señal radioeléctrica. 8. El aparato según una de las reivindicaciones anteriores, en el que el medio de determinación (32) se implementa para proporcionar características de señal de la señal radioeléctrica en la posición (21) que están relacionadas con una intensidad de campo recibida. 9. El aparato según la reivindicación 8, en el que el medio de determinación (32) se implementa para proporcionar un valor de RSSI, un espectro de potencia recibida o una relación de señal con respecto a ruido de la señal radioeléctrica del cierto radiotransmisor (22e) en la posición (21) . 10. El aparato según una de las reivindicaciones anteriores, en el que el cierto radiotransmisor (22e) es 14 una estación base WLAN. 11. El aparato según la reivindicación 10, en el que la identificación del cierto radiotransmisor (22e) es una dirección MAC del cierto radiotransmisor. 5 12. El aparato según una de las reivindicaciones anteriores implementado en un dispositivo terminal móvil con capacidad WLAN. 13. Un procedimiento para determinar una correspondencia de una posición (21) con una posición de referencia (24) , en el que señales radioeléctricas de radiotransmisores estacionarios (22) pueden recibirse en la posición, que comprende: determinar una identificación de cierto radiotransmisor (22e) y determinar una característica de señal de una señal radioeléctrica del cierto radiotransmisor en un primer momento (t1) , en el que la identificación y la característica de señal de la señal radioeléctrica del cierto radiotransmisor representan al menos parte de un paquete de medición (MP) para la posición (21) ; postprocesar el paquete de medición (MP) para obtener un paquete de medición postprocesado (MP') para la posición (21) , en el que el medio de prostprocesamiento se implementa para sintetizar al menos temporalmente la 20 característica de señal del cierto radiotransmisor, comenzando desde el primer momento (t1) hasta un segundo momento (t2) después del primer momento (t1) , para el cual la identificación del cierto radiotransmisor (22e) no puede determinarse, cuando el primer momento (t1) era el último momento antes del segundo momento (t2) cuando la identificación del cierto radiotransmisor (22e) era determinable, donde un primer plazo de tiempo (ât) que es el tiempo entre los primer y segundo momentos, siendo este primer plazo de tiempo (ât) mayor o igual de 0, 5 segundos; y comparar el paquete de medición postprocesado (MP') con al menos un paquete de medición de referencia determinado previamente (RP) para la posición de referencia (24) , para determinar la correspondencia. 14. Un programa informático que comprende un código de programa para realizar el procedimiento para determinar una correspondencia según la reivindicación 13, cuando el programa informático se ejecuta en un ordenador.
Patentes similares o relacionadas:Método y sistema computarizados de seguimiento y advertencia de proximidad para el personal, la planta y el equipo que funcionan tanto por encima como por debajo del suelo o su movimiento entre ellos, del 1 de Julio de 2020, de EMB Safety Helmet Pty Ltd: Un sistema informatizado de advertencia de proximidad y seguimiento de seguridad para el personal , la planta y el equipo […] CASCO INTELIGENTE PARA MOTOS, del 19 de Junio de 2020, de JURADO SECO, Sacha: 1. Casco inteligente para motos, caracterizado porque está formado por un casco de moto con conectividad, que incorpora un micrófono , auriculares , cámaras de […] Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […] Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […] MÉTODO PARA DETERMINAR EL MODO DE TRANSPORTE DE UNA POBLACIÓN A PARTIR DE DATOS DE FACTURACIÓN DE SERVICIOS MÓVILES, del 14 de Mayo de 2020, de UNIVERSIDAD DEL DESARROLLO: La presente invención se relaciona al campo de los sistemas y métodos para procesamiento de datos, más específicamente con métodos de procesamiento de datos con […] Procedimiento y sistema de geolocalización para el cálculo directo de elementos de desplazamiento, del 13 de Mayo de 2020, de THALES: Procedimiento para determinar la posición de uno o varios objetos susceptibles de desplazarse en una red, estando dotados uno o varios objetos […] Dispositivo, sistema y procedimiento de lector de etiquetas de datos portátil para identificar la localización de una etiqueta de datos, del 1 de Abril de 2020, de SYMBOL TECHNOLOGIES, LLC: Procedimiento para identificar la localización de una etiqueta de datos portátil, comprendiendo el procedimiento: leer la etiqueta de datos […] Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […] Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
|