Procedimiento y disposición de control para el manejo en paralelo de al menos dos dispositivos de elevación, en particular grúas.
Procedimiento para el manejo de al menos dos dispositivos de elevación,
en particular de al menos dos grúas (1a,1b), en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico (6a, 6b) con un control asignado (3a, 3b) que está unido a una botonera de control (9a, 9b), controlándose los al menos dos dispositivos de elevación mediante un bus común (7), controlándose conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control (9a, 9b) mediante el bus (7), caracterizado por que en el funcionamiento en grupo, una de las botoneras de control (9a, 9b) se encuentra en estado activo y la o las botoneras de control restantes (9b, 9a) se encuentran en estado pasivo, por que para la preparación del funcionamiento en grupo se puede cancelar la selección del funcionamiento normal mediante todas las botoneras de control que se encuentran en el funcionamiento normal, exceptuando una de las botoneras de control (9a, 9b), el funcionamiento en grupo se conecta a continuación mediante la otra botonera de control (9b, 9a) y esta otra botonera de control (9b, 9a) se encuentra ahora en estado activo en el funcionamiento en grupo, y por que para la preparación del funcionamiento normal se cancela la selección del funcionamiento en grupo mediante la botonera de control (9a, 9b) en estado activo en el funcionamiento en grupo, se selecciona el funcionamiento normal y la otra botonera de control (9a, 9b) o las otras botoneras de control (9a, 9b) en el funcionamiento en grupo pasivo se conectan a continuación para el funcionamiento normal.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/066454.
Solicitante: Terex MHPS GmbH.
Nacionalidad solicitante: Alemania.
Dirección: FORSTSTRASSE 16 40597 DUSSELDORF ALEMANIA.
Inventor/es: BEHNKE,KLAUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Sistemas o dispositivos de control (exclusivamente para mecanismos de rodadura de cuerdas, cables o cadenas B66D 1/40).
- B66C13/40 B66C 13/00 […] › Utilización de dispositivos para transmitir impulsos de control; Utilización de dispositivos de control a distancia (controles en general G05).
PDF original: ES-2538118_T3.pdf
Fragmento de la descripción:
Procedimiento y disposición de control para el manejo en paralelo de al menos dos dispositivos de elevación, en particular grúas Descripción La invención se refiere a un procedimiento para el manejo de al menos dos dispositivos de elevación, en particular al menos dos grúas, en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico con un control asignado que está unido a una botonera de control, controlándose los al menos dos dispositivos de elevación mediante un bus común, controlándose conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control mediante el bus.
La invención se refiere también a una disposición de control para el manejo de al menos dos dispositivos de elevación, en particular al menos dos grúas, en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico con un control asignado que está unido a una botonera de control.
En general es conocido utilizar a la vez dos mecanismos elevadores de grúa en un llamado funcionamiento en tándem para la subida y bajada de cargas pesadas y/o largas. A este respecto, la carga está suspendida de dos medios de toma de carga que se suben o se bajan respectivamente mediante un mecanismo elevador de grúa propio. Por distintas razones, la carga se puede desviar de su posición horizontal. En el caso, por ejemplo, de mercancías largas que están suspendidas normalmente de los medios de toma de carga con ayuda de eslingas, tales como gazas, este tipo de inclinación de la carga podría provocar que la carga se deslice hacia afuera de las eslingas. Estas situaciones peligrosas se deben evitar. Normalmente, cada uno de los mecanismos elevadores de grúa se puede manejar mediante una botonera de control. Una de las dos botoneras de control está diseñada para el funcionamiento en tándem. Sólo por medio de esta botonera de control se cambia al funcionamiento en tándem o se sale del funcionamiento en tándem. Esto puede originar situaciones peligrosas que deben ser evitadas. Por una parte, el cambio de los modos operativos se lleva a cabo sin confirmación de posición, de modo que el operario debe confiar en que el funcionamiento en tándem está activado, y, por otra parte, la botonera de control, diseñada para el funcionamiento en tándem, interviene inmediatamente en el funcionamiento de la otra grúa, lo que puede originar aquí situaciones peligrosas.
En relación con este tema es conocido, por ejemplo, de la publicación para información de solicitud de patente alemana DE3147158A1, unir dos mecanismos elevadores de grúa para el funcionamiento en tándem mediante un dispositivo de control común. Este dispositivo de control tiene la función de impedir la posición inclinada descrita arriba. A tal efecto, un sensor se encuentra dispuesto sobre un travesaño de carga suspendido de medios de toma de carga de los dos mecanismos elevadores de grúa. Este sensor determina la posición del travesaño de carga. En caso de que el travesaño de carga abandone su posición horizontal deseada, se abandona el funcionamiento en tándem, se detiene uno de los dos mecanismos elevadores de grúa y el travesaño de carga se mueve de nuevo a la posición horizontal con el otro mecanismo elevador de grúa.
Asimismo, de la patente europea EP1380533A1 es conocida una grúa de puente, cuyo accionamiento de carro, accionamiento de traslación de grúa, mecanismo elevador y botonera de control están unidos entre sí mediante un bus. Mediante el bus se transmiten y se reciben señales de funcionamiento y seguridad.
Del modelo de utilidad alemán DE9115537U1 es conocido un control de grúa simple para una grúa simple y un control de grúa en tándem para una primera grúa con un primer carro y una segunda grúa con un segundo carro. Para el control de la grúa en tándem está previsto un bus de transmisión bidireccional que permite controlar mediante botoneras de control, conectadas al mismo, las dos grúas y sus carros. No se describe el control de una de las dos grúas dentro del control de grúa en tándem.
La solicitad de patente alemana DE102006040782A1 divulga además un funcionamiento en tándem de dos grúas dentro de un sistema de seguridad, así como un control separado de las grúas en un funcionamiento individual. Cada una de las grúas dispone de un bus CAN de a bordo, al que se conecta un sistema de control. Para correcciones necesarias dentro del funcionamiento en tándem, se cancela la selección del funcionamiento en tándem, se realiza la corrección y se vuele a seleccionar el funcionamiento en tándem.
Partiendo de este estado de la técnica, la presente invención tiene el objetivo de crear un dispositivo de control para el manejo seguro en paralelo de al menos dos dispositivos de elevación, en particular grúas.
Este objetivo se consigue mediante un procedimiento con las características de la reivindicación 1 y una disposición de control con las características de la reivindicación 3. En las reivindicaciones 2, 4 a 8 aparecen configuraciones ventajosas del dispositivo de control.
Según la invención, un procedimiento seguro y simple para el manejo de al menos dos dispositivos de elevación, en particular al menos dos grúas, en un funcionamiento en grupo y en un funcionamiento normal, presentando cada
dispositivo de elevación un motor de mecanismo elevador eléctrico con un control asignado que está unido a una botonera de control, controlándose los al menos dos dispositivos de elevación mediante un bus común, controlándose conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control mediante el bus, se consigue porque en el funcionamiento en grupo, una de las botoneras de control se encuentra en estado activo y la o las botoneras de control restantes se encuentran en estado pasivo, porque para la preparación del funcionamiento en grupo se cancela la selección del funcionamiento normal mediante todas las botoneras de control que se encuentran en el funcionamiento normal, exceptuando una de las botoneras de control (9a, 9b) , el funcionamiento en grupo se conecta a continuación mediante la otra botonera de control y esta otra botonera de control se encuentra ahora en estado activo en el funcionamiento en grupo, y porque para la preparación del funcionamiento normal se cancela la selección del funcionamiento en grupo mediante la botonera de control (9a, 9b) en estado activo en el funcionamiento en grupo, se selecciona el funcionamiento normal y la otra botonera de control (9a, 9b) o las otras botoneras de control en el funcionamiento en grupo pasivo se conectan a continuación para el funcionamiento normal.
Está previsto de manera particularmente ventajosa que la botonera de control en estado activo dentro del funcionamiento en grupo se maneje en tres modos operativos y que los modos operativos estén definidos como funcionamiento en tándem, en el que varios dispositivos de elevación se controlan en paralelo mediante la botonera de control en estado activo, como primer funcionamiento individual, en el que sólo un primer dispositivo de los dispositivos de elevación se controla mediante la botonera de control en estado activo, y como segundo funcionamiento individual, en el que sólo un segundo dispositivo de los dispositivos de elevación se controla mediante la botonera de control en estado activo.
Según la invención, una disposición de control segura y simple para el manejo de al menos dos dispositivos de elevación, en particular al menos dos grúas, en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico con un control asignado que está unido a una botonera de control, pudiéndose controlar los al menos dos dispositivos de elevación mediante un bus común, pudiéndose controlar conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control mediante el bus, se consigue porque en el funcionamiento en grupo, una de las botoneras de control se encuentra en estado activo y la o las botoneras de control restantes se encuentran en estado pasivo, porque para la preparación del funcionamiento en grupo se puede cancelar la selección del funcionamiento normal mediante todas las botoneras de control que se encuentran en el funcionamiento normal, exceptuando una de las botoneras de control (9a, 9b) , antes de que la otra botonera de control pueda conectar el funcionamiento en grupo, y esta botonera de control (9b, 9a) se encuentra ahora en estado activo... [Seguir leyendo]
Reivindicaciones:
Reivindicaciones
1. Procedimiento para el manejo de al menos dos dispositivos de elevación, en particular de al menos dos grúas (1a, 1b) , en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico (6a, 6b) con un control asignado (3a, 3b) que está unido a una botonera de control (9a, 9b) , controlándose los al menos dos dispositivos de elevación mediante un bus común (7) , controlándose conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control (9a, 9b) mediante el bus (7) , caracterizado por que en el funcionamiento en grupo, una de las botoneras de control (9a, 9b) se encuentra en estado activo y la o las botoneras de control restantes (9b, 9a) se encuentran en estado pasivo, por que para la preparación del funcionamiento en grupo se puede cancelar la selección del funcionamiento normal mediante todas las botoneras de control que se encuentran en el funcionamiento normal, exceptuando una de las botoneras de control (9a, 9b) , el funcionamiento en grupo se conecta a continuación mediante la otra botonera de control (9b, 9a) y esta otra botonera de control (9b, 9a) se encuentra ahora en estado activo en el funcionamiento en grupo, y por que para la preparación del funcionamiento normal se cancela la selección del funcionamiento en grupo mediante la botonera de control (9a, 9b) en estado activo en el funcionamiento en grupo, se selecciona el funcionamiento normal y la otra botonera de control (9a, 9b) o las otras botoneras de control (9a, 9b) en el funcionamiento en grupo pasivo se conectan a continuación para el funcionamiento normal.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que la botonera de control (9a, 9b) en estado activo dentro del funcionamiento en grupo se maneja en tres modos operativos y los modos operativos están definidos como funcionamiento en tándem, en el que varios dispositivos de elevación se controlan en paralelo mediante la botonera de control (9a, 9b) en estado activo, como primer funcionamiento individual, en el que sólo un primer dispositivo de los dispositivos de elevación se controla mediante la botonera de control (9a, 9b) en estado activo, y como segundo funcionamiento individual, en el que sólo un segundo dispositivo de los dispositivos de elevación se controla mediante la botonera de control (9a, 9b) en estado activo.
3. Disposición de control para el manejo de al menos dos dispositivos de elevación, en particular al menos dos grúas (1a, 1b) , en un funcionamiento en grupo y en un funcionamiento normal, presentando cada dispositivo de elevación un motor de mecanismo elevador eléctrico (6a, 6b) con un control asignado (3a, 3b) que está unido a una botonera de control (9a, 9b) , pudiéndose controlar los al menos dos dispositivos de elevación mediante un bus común (7) , pudiéndose controlar conjuntamente los al menos dos dispositivos de elevación en el funcionamiento en grupo con ayuda de una de las botoneras de control (9a, 9b) mediante el bus (7) , caracterizada por que en el funcionamiento en grupo, una de las botoneras de control (9a, 9b) se encuentra en estado activo y la o las botoneras de control restantes (9b, 9a) se encuentran en estado pasivo, por que para la preparación del funcionamiento en grupo se puede cancelar la selección del funcionamiento normal mediante todas las botoneras de control que se encuentran en el funcionamiento normal, exceptuando una de las botoneras de control (9a, 9b) , antes de que la otra botonera de control (9b, 9a) pueda conectar el funcionamiento en grupo, y esta botonera de control (9b, 9a) se encuentra ahora en estado activo en el funcionamiento en grupo, y por que para la preparación del funcionamiento normal se puede cancelar la selección del funcionamiento en grupo mediante la botonera de control activa (9a, 9b) en el funcionamiento en grupo y se puede seleccionar el funcionamiento normal, antes de que la otra botonera de control (9a, 9b) o las otras botoneras de control en el funcionamiento en grupo pasivo se puedan conectar para el funcionamiento normal.
4. Disposición de control de acuerdo con la reivindicación 3, caracterizada por que la botonera de control (9a, 9b) en estado activo dentro del funcionamiento en grupo se puede manejar en tres modos operativos y los modos operativos están definidos como funcionamiento en tándem, en el que la botonera de control (9a, 9b) en estado activo controla en paralelo varios dispositivos de elevación, como primer funcionamiento individual, en el que la botonera de control (9a, 9b) en estado activo controla sólo un primer dispositivo de los dispositivos de elevación, y como segundo funcionamiento individual, en el que la botonera de control (9a, 9b) en estado activo controla sólo un segundo dispositivo de los dispositivos de elevación.
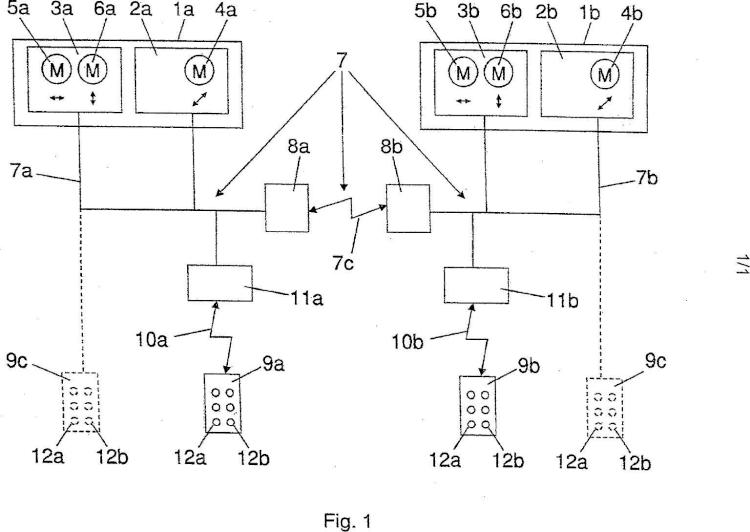
5. Disposición de control de acuerdo con la reivindicación 3 o 4, caracterizada por que el bus (7) está subdividido por cada dispositivo de elevación en una sección de bus alámbrica (7a, 7b) y entre los dispositivos de elevación, en un bus inalámbrico (7c) .
6. Disposición de control de acuerdo con una de las reivindicaciones 3 a 5, caracterizada por que los controles (3a, 3b) y las botoneras de control (9a, 9b) están conectadas al bus común (7) .
7. Disposición de control de acuerdo con una de las reivindicaciones 3 a 6, caracterizada por que la conexión y desconexión de las botoneras de control (9a, 9b) se pueden monitorizar mediante los controles (3a, 3b) .
8. Disposición de control de acuerdo con una de las reivindicaciones 3 a 6, caracterizada por que los al menos dos
dispositivos de elevación están configurados como grúas (1a, 1b) , por que las grúas (1a, 1b) presentan, además de los motores de mecanismo elevador (6a, 6b) , motores de traslación de grúa (4a, 4b) y motores de traslación de carro (5a, 5b) , por que los controles (3a, 3b) están asignados a los motores de mecanismo elevador (6a, 6b) y a los motores de traslación de carro (5a, 5b) y los controles de grúa (2a, 2b) están asignados a los motores de traslación 5 de grúa (4a, 4b) y por que los controles de grúa (2a, 2b) están conectados al bus (7) .
Patentes similares o relacionadas:
Sistema para mover automáticamente un brazo articulado, en particular de una grúa de carga, hacia una posición objetivo, del 23 de Octubre de 2019, de FASSI GRU S.p.A: Sistema para mover automaticamente un brazo articulado hacia una posicion objetivo, que comprende: - dicho brazo articulado que comprende una pluralidad de […]
Sistema para mover automáticamente un brazo articulado, particularmente de una grúa articulada, del 23 de Octubre de 2019, de FASSI GRU S.p.A: Sistema para mover automáticamente un brazo articulado , que comprende: - dicho brazo articulado , que comprende una pluralidad de cuerpos conectados […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Grúa torre rotatoria, del 3 de Abril de 2019, de Liebherr-Components Biberach GmbH: Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable un […]
Freno para una máquina eléctrica y máquina eléctrica equipada con un freno de este tipo, del 2 de Noviembre de 2018, de MOTEURS LEROY-SOMER: Freno para motor eléctrico , que comprende: - una culata , - por lo menos un disco de freno destinado a ser accionado […]
Grúa torre rotatoria, del 26 de Septiembre de 2018, de Liebherr-Components Biberach GmbH: Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable […]
Controlador de grúa, del 4 de Abril de 2018, de LIEBHERR-WERK NENZING GMBH: Un controlador de grúa para el control semiautomático de una grúa giratoria, comprendiendo la grúa al menos un accionador giratorio para crear un movimiento de giro […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]