Método y aparato de transferencia de artículos de un primer transportador a un segundo transportador.
Método para la transferencia de artículos (2) desde una primera línea transportadora (3) a una segunda línea transportadora (4),
que comprende:
- Colocación de un mínimo de dos elementos manipuladores (5,6) cerca de la primera línea transportadora (3) y por encima de la misma;
- Accionamiento de cada uno de los dos elementos manipuladores (5,6) para recoger un par correspondiente de artículos (2) soportados por la primera línea transportadora (3) con un recorrido de recogida prefijado (P*);
- Colocación de cada uno de los dos elementos manipuladores (5,6) cerca de la segunda línea transportadora (4) y por encima de la misma.
- Accionamiento de cada uno de los dos elementos manipuladores (5,6) para colocar el correspondiente par de artículos (2) sobre la segunda línea transportadora (4) con un recorrido de colocación prefijado (R*); caracterizado porque
- antes de la operación de recogida, cada uno de los dos elementos manipuladores (5,6) siguen la primera línea transportadora (3) con una velocidad relativa sustancialmente nula;
- antes de la operación de colocación, cada uno de los dos elementos manipuladores (5,6) sigue la segunda línea transportadora (4) con una velocidad relativa sustancialmente nula; con dichos, como mínimo, dos elementos manipuladores (5,6) accionados independientemente entre si en las operaciones antes mencionadas de situación, seguimiento, recogida y colocación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06005936.
Solicitante: MARCHESINI GROUP S.P.A..
Inventor/es: MONTI, GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/52 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para transferir objetos o materiales entre transportadores, p. ej. para descargar o alimentar (carga o descarga por medios no incorporados o cuyo funcionamiento no está asociado con los transportadores B65G 65/00; transferencia de piezas o mecanizar durante la laminación B21B 41/00).
- B65G47/90 B65G 47/00 […] › Dispositivos para coger o dejar los artículos o los materiales.
PDF original: ES-2321538_T3.pdf
Fragmento de la descripción:
Método y aparato de transferencia de artículos de un primer transportador a un segundo transportador
La presente invención se refiere al embalaje automático de artículos, en particular fármacos, cosméticos y/o alimentos.
De manera más precisa, la presente invención se refiere a un método de transferencia artículos desde una primera línea transportadora a una segunda línea transportadora de acuerdo con el preámbulo de la reivindicación 1, por ejemplo, para alimentar una encajonadora. Además, la invención se refiere a un aparato de acuerdo con el preámbulo de la reivindicación 12, para llevar a cabo el método.
Los aparatos de transferencia conocidos incluyen medios de manipulación para recoger artículos desde una primera línea transportadora, donde se colocan dentro de los compartimentos respectivos o a granel y moverlos a las cajas correspondientes de una segunda línea transportadora, para alimentar una encajonadora. Un método y aparato conocidos de acuerdo con el preámbulo de las reivindicaciones 1 y 12 se desvela en el documento GB-A-1375703.
Los medios de manipulación, que se mueven a lo largo de dos o tres ejes, generalmente incluyen brazos cuyos extremos soportan medios para recoger/liberar los artículos.
En caso de que la primera línea transportadora se haga funcionar de forma continua, el brazo sigue la línea manteniendo la alineación con un artículo, a continuación lo recoge y posteriormente lo libera en un compartimento de la segunda línea transportadora.
En caso de que la primera línea transportadora se haga funcionar de forma escalonada, el artículo se libera en el compartimento preferentemente durante una parada, mientras que en el caso de un funcionamiento continuo, es necesario un movimiento de seguimiento de dos etapas, manteniendo la alineación con el compartimento en primer lugar y liberando posteriormente el artículo.
Existen también medios de manipulación que incluyen dos brazos, actuando el uno sobre el otro o conectados mecánicamente entre sí, con medios de recogida de artículos correspondientes situados en sus extremos.
El problema principal de los aparatos de transferencia conocidos deriva del índice de producción limitado que pueden alcanzar en el sistema, que es Incompatible con los elevados estándares que requiere el mercado actualmente.
Otra desventaja de los aparatos conocidos reside en su insuficiente flexibilidad durante la recogida/liberación de los artículos en lo que respecta a posibles cambios de velocidad y/o configuración de recogida/liberación, así como al cambio del tamaño de los artículos.
El objetivo de la presente invención es proponer un método de transferencia de artículos, en particular fármacos, cosméticos y/o alimentos, desde una primera línea transportadora a una segunda línea transportadora de artículos, que garantice índices de producción y estándares de flexibilidad elevados durante su funcionamiento, independientemente del tamaño del artículo y de la configuración y/o velocidad de recogida/liberación de los artículos.
Otro objetivo de la presente invención es proponer un método de transferencia de artículos que se distingue por etapas operativas particularmente rápidas y fáciles de entender, que garantiza estándares de fiabilidad elevados en cualquier etapa de producción.
Otro objetivo de la presente invención es proponer un aparato para llevar a cabo el método anterior, que garantiza una flexibilidad y versatilidad elevadas sean cuales sean las condiciones de funcionamiento, permitiendo operaciones de adaptación particularmente rápidas y sencillas, requeridas por el cambio de tamaño y/o de etapa.
Otro objetivo adicional de la presente invención es proponer un aparato extremadamente funcional, que garantiza operaciones de instalación y mantenimiento particularmente rápidas y sencillas.
Los objetivos anteriormente mencionados se consiguen de acuerdo con el contenido de la reivindicación del método 1 y la reivindicación del aparato 12.
Las características particulares de la invención se señalan en la siguiente descripción de algunas realizaciones preferidas aunque no exclusivas, con referencia a las figuras adjuntas, en las que:
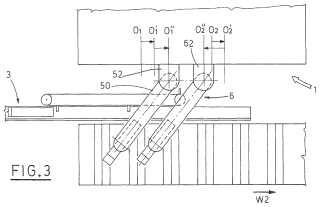
- las Figuras 1,2, 3, 4 son otras tantas vistas superiores, esquemáticas del aparato propuesto en etapas de funcionamiento relativas del método propuesto por la invención;
- la Figura 2A es una vista lateral, esquemática del aparato, tomada a lo largo de la línea A-A Indicada en la Figura 1;
- la Figura 4A es una vista lateral, esquemática del aparato, tomada a lo largo de la línea B-B Indicada en la Figura 4.
Con referencia a las figuras anteriormente descritas, el numero de referencia general 1 indica el aparato propuesto, que lleva a cabo el método propuesto por la Invención para la transferencia de artículos 2, por ejemplo tubos rígidos y/o oprlmlbles desde una primera línea transportadora 3 a una segunda línea transportadora de artículos 4.
Únicamente a modo de ejemplo, los artículos 2 de la primera línea transportadora 3 están alineados longitudinalmente y se liberan en la segunda línea transportadora 4 dispuestos longitudinalmente uno al lado del otro.
Se considera que la primera y segunda líneas 3 y 4 están situadas una al lado de la otra y funcionan en la misma dirección de avance Wi, W2.
La primera línea transportadora 3 se hace funcionar preferentemente de forma continua, mientras que la segunda línea transportadora 4 puede hacerse funcionar de forma escalonada o continua, prefiriéndose esta última.
El aparato de transferencia 1 incluye al menos dos miembros de manipulación 5, 6 que funcionan Independientemente entre sí, en una relación de etapas adecuada, para recoger un par de artículos 2 correspondiente colocados en la primera línea transportadora 3 durante una etapa de recogida P* y para liberarlos en una posición que corresponde a la segunda línea transportadora 4, durante una etapa de liberación R* en una configuración de liberación R que es angular con respecto a la configuración de recogida P, por ejemplo, con una rotación de 90 °.
Los dos miembros de manipulación 5, 6 se mueven preferentemente a lo largo de al menos cuatro ejes [(x-i, co-i, a-i,
z-i), (x2, u>2, a2, z2)j.
De acuerdo con una realización preferida mostrada en las figuras adjuntas, los miembros de manipulación 5, 6 incluyen brazos 50, 60 pertinentes, cada uno de cuales tiene un extremo girado hacia medios de soporte correspondientes 52, 62 y otro extremo provisto de medios 51, 61 para recoger y/o liberar los artículos 2.
Los medios de soporte 52, 62 se pueden trasladar horizontalmente (x-i, x2) y/o verticalmente z2), respectivamente para seguir las líneas 3, 4 y moverse hacia y desde estas líneas 3, 4 durante la acción de recogida/liberación del artículo 2.
Los brazos 50, 60 se giran hacia los medios de soporte 52, 62 correspondientes para balancearse (co-i, io2) con respecto a ejes verticales pertinentes y permitir su colocación cerca de las líneas 3, 4.
De manera similar, los medios de recogida 51, 61 de los artículos 2 se giran hacia los brazos 50, 60 correspondientes para balancearse (a-i, a2) con respecto a los ejes verticales pertinentes y permitir que los artículos 2 se liberen en la configuración R, angular con respecto a la configuración de recogida P, por ejemplo con una rotación de 90 0
Durante la acción de recogida/liberación de los artículos 2, los brazos 50, 60 se hacen funcionar manteniendo por ejemplo una posición coplanaria, para acercarse y/alejarse entre sí.
El método propuesto por la invención, para la transferencia de artículos 2, por ejemplo, tubos rígidos y/u oprimibles desde una primera línea transportadora 3 a una segunda línea transportadora de artículos 4, llevado a cabo por el aparato propuesto 1, incluye:
- colocar al menos dos miembros de manipulación 5, 6, cerca y por encima de la primera línea transportadora 3;
- operar cada uno de los dos miembros de manipulación 5, 6 para seguir la primera línea transportadora 3 con una velocidad relativa, sustancialmente igual a cero;
- operar cada uno de los dos miembros de manipulación 5, 6 para recoger un par de artículos 2 correspondiente llevados por la primera línea transportadora 3 con una etapa de recogida previamente fijada P*;
- colocar cada uno de los dos miembros de manipulación 5, 6 cerca y por encima de la segunda línea transportadora 4;
- operar cada uno de los dos miembros de manipulación 5, 6 para seguir la segunda línea transportadora 4 con una velocidad relativa sustancialmente igual a cero;
- operar cada uno de los dos miembros... [Seguir leyendo]
Reivindicaciones:
1. Método de transferencia de artículos (2) desde una primera línea transportadora (3) a una segunda línea transportadora (4), que incluye:
- colocar al menos dos miembros de manipulación (5, 6) cerca y por encima de la primera línea transportadora
(3);
- operar cada uno de los dos miembros de manipulación (5, 6) para recoger un par de artículos (2) correspondiente llevados por la primera linea transportadora (3) con una etapa de recogida (P*) previamente fijada;
- colocar cada uno de los dos miembros de manipulación (5, 6) cerca y por encima de la segunda linea transportadora (4).
- operar cada uno de los dos miembros de manipulación (5, 6) para liberar el par de artículos (2) correspondiente sobre la segunda línea transportadora (4) con una etapa de liberación (R*) previamente fijada; caracterizado por que
- antes de la operación de recogida, cada uno de los dos miembros de manipulación (5, 6) sigue la primera línea transportadora (3) con una velocidad relativa sustancialmente Igual a cero;
- antes de la operación de liberación, cada uno de los dos miembros de manipulación (5, 6) sigue la segunda línea transportadora (4) con una velocidad relativa sustancialmente igual a cero;
funcionando dichos al menos dos miembros de manipulación (5, 6) independientemente entre si en las anteriores etapas de colocación, seguimiento, recogida y liberación.
2. Método de acuerdo con la reivindicación 1, caracterizado por que incluye, en la relación de etapas estando siguiendo los miembros de manipulación (5, 6) la primera línea transportadora (3):
- operar cada uno de los dos miembros de manipulación (5, 6) para acercarse a la primera linea transportadora
(3);
- operar cada uno de los dos miembros de manipulación (5, 6) para recoger el par de artículos (2) que lleva la primera línea transportadora (3) en una etapa de recogida (P*);
- operar cada uno de los dos miembros de manipulación (5, 6) para alejarse de la primera línea transportadora
(3).
3. Método de acuerdo con la reivindicación 1 o 2, caracterizado por que incluye, en la relación de etapas estando siguiendo los miembros de manipulación (5, 6) la segunda línea transportadora (4):
- operar cada uno de los dos miembros de manipulación (5, 6) para acercarse a la segunda línea transportadora
(4) ;
- operar cada uno de los dos miembros de manipulación (5, 6) para liberar dicho par de artículos (2) sobre la segunda línea transportadora (4) en una etapa de liberación (R*);
- operar cada uno de los dos miembros de manipulación (5, 6) para alejarse de la segunda línea transportadora (4).
4. Método de acuerdo con cualquiera de las reivindicaciones 1 a 3, caracterizado por que la etapa de recogida (P*) es diferente de la etapa de liberación (R*).
5. Método de acuerdo con cualquiera de las reivindicaciones 1 a 4, caracterizado por que la configuración (R) de liberación de los artículos (2) sobre la segunda línea transportadora (4) está a un ángulo con respecto a la configuración de recogida (P) de la primera línea transportadora (3).
6. Método de acuerdo con la reivindicación 1 o 2, caracterizado por que los artículos (2) de la primera línea transportadora (3) están alineados longitudinalmente.
7. Método de acuerdo con la reivindicación 6, caracterizado por que dicha primera línea transportadora (3) se hace funcionar de forma continua.
8. Método de acuerdo con la reivindicación 1 o 3, caracterizado por que los artículos (2) en la segunda línea transportadora (4) están dispuestos longitudinalmente uno al lado del otro.
9. Método de acuerdo con la reivindicación 8, caracterizado por que dicha segunda línea transportadora (4) se hace funcionar de forma continua.
10. Método de acuerdo con cualquiera de las reivindicaciones 1 a 9, caracterizado por que dicha primera línea transportadora (3) y dicha segunda línea transportadora (4) están dispuestas una al lado de la otra y se hacen funcionar en la misma dirección de avance (Wi, W2).
11. Método de acuerdo con cualquiera de las reivindicaciones 1 a 10, caracterizado por que incluye al menos, dos miembros de manipulación (5, 6) que se funcionan independientemente entre sí y que tienen al menos cuatro ejes
[(x-i, coi, ai, z-i), (x2, (a)2, 0.2, z2)].
12. Aparato de transferencia de artículos desde una primera línea transportadora a una segunda línea de transferencia de artículos que tiene al menos dos miembros de manipulación (5, 6) para recoger un par de artículos (2) que se mueven a lo largo de la primera línea transportadora (3) en una etapa de recogida (P*) y para liberar el par de artículos recogidos sobre la segunda línea transportadora (4) en una etapa de liberación (R*), en el que en la configuración de liberación (R) los artículos se disponen de forma angular con respecto a la configuración de recogida (P); operándose dichos al menos dos miembros de manipulación (5, 6) independientemente entre sí y teniendo al menos cuatro ejes [(x-i, uh, a-i, zi), (x2, w2, a2, z2)], caracterizado por que dichos miembros de manipulación (5, 6) incluyen brazos (50, 60) pertinentes soportados, por un extremo, por medios de soporte (52, 62) correspondientes y que tienen, en el otro extremo, medios (51, 61) para recoger y/o liberar los artículos (2); trasladándose dichos medios de soporte (52, 62) horizontalmente (x-i, x2) y verticalmente (z-i, z2) respectivamente para seguir y moverse hacia/desde la primera línea transportadora (3) y la segunda línea transportadora (4) correspondiente; estando articulados dichos brazos (50, 60) a los medios de soporte (52, 62) correspondientes y rotando (wi, w2) con respecto a ejes verticales pertinentes para colocarse cerca de las líneas (3, 4): estando articulados dichos medios de recogida (51, 61) a los brazos (50, 60) correspondientes y rotando (a-i,a2) con respecto a los ejes verticales relevantes, para liberar los artículos (2) con una orientación (R) fijada a un ángulo con respecto a la orientación de recogida (P).
13. Aparato de acuerdo con la reivindicación 12, caracterizado por que los brazos (50, 60) son sustancialmente coplanarios.
14. Aparato de acuerdo con las reivindicaciones 12 y 13, caracterizado por que los brazos (50, 60) se hacen funcionar para acercarse o alejarse entre sí.
15. Aparato de acuerdo con la reivindicación 12, caracterizado por que los artículos (2) en la primera línea transportadora (3) están alineados longitudinalmente.
16. Aparato de acuerdo con la reivindicación 12, caracterizado por que los artículos (2) en la segunda línea transportadora (4) están dispuestos longitudinalmente uno al lado del otro.
17. Aparato de acuerdo con una de las reivindicaciones 12 a 16, caracterizado por que dicha primera línea transportadora (3) se hace funcionar de forma continua.
18. Aparato de acuerdo con una de las reivindicaciones 12 a 16, caracterizado por que dicha segunda línea transportadora (4) se hace funcionar de forma continua.
19. Aparato de acuerdo con una de las reivindicaciones 12 a 18, caracterizado por que dicha primera línea transportadora (3) y dicha segunda línea transportadora (4) están colocadas una al lado de la otra y se hacen funcionar en la misma dirección de avance (Wi, W2).
Patentes similares o relacionadas:
DISPOSITIVO DE SUJECIÓN DE OBJETOS PARA PISTAS DE TRANSFERENCIA Y MÁQUINA PARA MANIPULAR OBJETOS ASOCIADA AL MISMO, del 11 de Febrero de 2020, de MULET VALLES,TOMAS: Dispositivo de sujeción de objetos para pistas de transferencia, que comprende al menos un carro de transferencia configurado para moverse en circuito cerrado […]
Dispositivo de relevo, del 13 de Noviembre de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de relevo que comprenda: una primera sección de transporte que transporta una pluralidad de objetos a transportar, continuamente […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
Sistema para transportar y transferir productos alimenticios, del 21 de Agosto de 2019, de Marel Meat Processing Inc: Sistema para transportar productos alimenticios para envasado, que comprende: - una cinta transportadora que transporta productos alimenticios […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 15 de Mayo de 2019, de LAITRAM L.L.C.: Un transportador que comprende: una correa transportadora que incluye: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras […]
Uso de un sistema de clasificación para artículos de tamaño variable, del 18 de Marzo de 2019, de BEUMER Group A/S: Método de uso de un sistema de clasificación para recibir artículos en una o más ubicaciones de carga y descargar artículos en una o más ubicaciones de descarga, en donde […]
Máquina de desplazamiento de recipientes delante de unos puestos de control, del 13 de Febrero de 2019, de HCV 2: Máquina para llevar a desfilar, según un sentido dado, unos recipientes delante de al menos un puesto de control, incluyendo esta máquina: […]
Correa transportadora que incluye unos rodillos apilados bidireccionales, del 18 de Octubre de 2018, de LAITRAM L.L.C.: Una correa transportadora que comprende: una pluralidad de primeros conjuntos de rodillos dispuestos en unas primeras calles que se extienden […]