Disposición y procedimiento para la generación de un impulso de referencia para un aparato de medición de la posición.
Disposición para la generación de un impulso de referencia (Rl) para un aparato de medición de la posición,
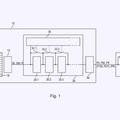
que comprende una incorporación de medición (10) con al menos una pista incremental (20) y con al menos una marca de referencia (32), así como comprende una unidad de exploración (40) para la generación de señales de posición (P0, P90) a través de exploración de la al menos una pista incremental (20) y para la generación de un impulso analógico de referencia (Rl_A) a través de la exploración de la al menos una marca de referencia (32), en la que
• la aparición del impulso analógico de referencia (Rl_A) es registrada en una unidad de memoria de impulsos de referencia (200) como impulso de referencia memorizado (Rl_M),
• el impulso de referencia memorizado (Rl_M) y al menos una señal de posición (P0, P90) son alimentados a una unidad de generación de impulsos de referencia (220), que conecta el impulso de referencia (Rl) en función del impulso de referencia memorizado (Rl_M) y de la aparición de una condición de ajuste y se desconecta en el caso de que aparezca una condición de reposición y la condición de ajuste y de reposición se pueden derivar a partir de la al menos una señal de posición (P0, P90).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/059363.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DR. JOHANNES-HEIDENHAIN-STRASSE 5 83301 TRAUNREUT ALEMANIA.
Inventor/es: BÖHM,GERD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/245 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › utilizando un número variable de pulsos en un tren.
PDF original: ES-2455118_T3.pdf
Fragmento de la descripción:
Disposición y procedimiento para la generación de un impulso de referencia para un aparato de medición de la posición La invención se refiere a una disposición así como a un procedimiento para la generación de un impulso de referencia de acuerdo con la reivindicación 1 y de acuerdo con la reivindicación 6, respectivamente. Además, la invención se refiere a un aparato de medición de la posición con una disposición correspondiente para la generación de un impulso de referencia de acuerdo con la reivindicación 11. Un impulso de referencia se necesita en aparatos incrementales de medición de la posición, para establecer un punto de referencia para la medición de la posición.
Se conocen aparatos incrementales de medición de la posición a partir de una pluralidad de publicaciones. Sirven sobre todo para la determinación de desplazamientos relativos o de la posición absoluta de partes de máquinas, por ejemplo en máquinas herramientas o máquinas de medición.
Tales aparatos de medición de la posición están constituidos esencialmente por una incorporación de medición, sobre la que se aplican una o varias pistas de división, y por una instalación de exploración, que explora las pistas de división y convierte las modificaciones del recorrido o modificaciones angulares en señales eléctricas. En el caso de aparatos de medición de longitudes, la incorporación de medición está configurada, por ejemplo, como escala. Si se emplea un aparato de medición de longitudes para la medición de movimientos relativos de las máquinas, se puede montar la escala estacionaria en la máquina, mientras que la unidad de exploración está fijada en una parte móvil de la máquina, por ejemplo un carro de la herramienta, cuyo movimiento relativo debe medirse con respecto a la máquina. En el caso de un movimiento de desplazamiento de carro de la herramienta, se mueve la unidad de exploración en un plano de exploración en la dirección de medición paralelamente a las pistas de división dispuestas sobre la escala, que se encuentran en un plano de la escala y explora las pistas de división. En este caso, se generan señales de posición, que indican la modificación de la posición relativa de la unidad de exploración con respecto a la escala.
Las pistas de división en aparatos incrementales de medición de la posición están constituidas por elementos codificados dispuestos unos detrás de los otros de manera uniforme en la dirección de medición. Tales pistas de división se designan también como pistas incrementales. A partir de la exploración de una pista incremental o bien se obtienen la mayoría de las veces dos señales de posición desplazadas 90º entre sí o cuatro señales de posición, que presentan las posiciones de fases 0º, 90º, 180º, 270º. Además, se conocen también aparatos de medición de la posición, que generan tres señales de posición con las posiciones de fases 0º, 120º, 240º. En el caso de movimiento uniforme de la unidad de exploración con relación a la incorporación de medición, estas señales de posición son en gran medida de forma sinusoidal. La determinación de la posición se realiza a través de recuento de periodos de señales transcurridos. Para poder calcular a partir de la medición de posiciones relativas una posición absoluta, debe crearse el punto de referencia. A tal fin sirve al menos una llamada marca de referencia, que está dispuesta, por ejemplo, sobre una pista de referencia junto a la pista de división incremental y que es leída de la mima manera por la unidad de exploración. Durante el paso por la marca de referencia aparece una pista analógica de la corriente y de la tensión, a partir de la cual se genera en el procesamiento siguiente una señal digital rectangular, el llamado impulso de referencia.
El impulso de referencia sirve finalmente en una electrónica siguiente para la determinación de la posición de referencia, que se utiliza como punto de referencia para la medición de la posición. El procesamiento del impuso de la corriente o de la tensión analógica con respecto al impulso de referencia se puede realizar, por ejemplo, por medio de un comparador, en el que la señal de entrada analógica es comparada con un umbral de conmutación definido y cuya salida es conmutada de forma correspondiente.
Requerimientos centrales en el impulso de referencia son una posición y una anchura definidas con respecto a las señales de posición. Si éstas no se cumplen, se pueden producir errores en la electrónica siguiente durante el enlace lógico el impulso de referencia con las señales de posición para la determinación del punto de referencia: si el punto de referencia es demasiado pequeño, puede suceder que no sea reconocido, si es demasiado ancho, se puede detectar en determinadas circunstancias en dos lugares. También es especialmente problemático que en ambos casos la posición del impulso de referencia con respecto a las señales de posición puede decidir sin se reconoce correctamente o no. De esta manera, en casos límite, incluso una modificación insignificante de la posición del impulso de referencia, provocada, por ejemplo, por oscilaciones de la temperatura, puede decidir sobre el reconocimiento correcto del impulso de referencia. Tanto un impulso de referencia erróneo como también un impulso de referencia reconocido doble conduce, sin embargo, a un caso de error, que puede significar un fallo de la máquina, en la que se acciona el aparato de medición de la posición.
La posición del impulso de referencia se ajusta hasta ahora en una medida predominante a través de ajuste mecánico costoso de la unidad de exploración después del montaje del aparato de medición de la posición en la aplicación de destino, por ejemplo una máquina herramienta o un escáner de obleas. De esta manera, en muchos principios de exploración a través de la rotación de la unidad de exploración, el impulso de referencia analógico se
desplaza con relación a la pista de división incremental. La anchura del impulso de referencia se puede ajustar a través de la modificación el umbral de comparación, es decir, el umbral de conmutación, que debe exceder o bien no alcanzar el impulso analógico de la señal o bien de la tensión, para generar el flanco de conexión o bien de desconexión del impulso de referencia. De manera alternativa, se puede superponer al impulso de referencia analógico también una desviación positiva o negativa. Cuanto mayor es la altura de la resolución del aparato de medición de la posición, tanto más elevado es el gasto para este ajuste mecánico y eléctrico. En el caso de periodos de división en el intervalo de algunos micrómetros, este método apenas es todavía satisfactorio. A ello hay que añadir que en estas resoluciones, las dilataciones térmicas, los efectos de la contaminación, etc. alcanzan órdenes de magnitud que incluyen sobre la posición y la anchura del impulso digital de referencia incluso en el caso de un ajuste mecánico exacto de la unidad de exploración en entorno crítico.
Por lo tanto, el cometido de la invención es indicar una disposición para la generación de un impulso de referencia con posición y anchura definida con respecto a las señales de posición de la pista incremental.
Este cometido se soluciona por medio de una disposición de acuerdo con la reivindicación 1. Los detalles ventajosos del procedimiento se deducen a partir de las reivindicaciones dependientes de la reivindicación 1.
Se propone ahora una disposición para la generación de un impulso de referencia para un aparato de medición de la posición, que comprende una incorporación de medición con al menos una pista incremental y con al menos una marca de referencia, así como comprende una unidad de exploración para la generación de señales de posición a través de exploración de la al menos una pista incremental y para la generación de un impulso de referencia analógico a través de la exploración de la al menos una marca de referencia, en la que en la disposición, el impulso analógico de referencia es registrado en una unidad de memoria de impulsos de referencia como impulso de referencia memorizado y el impulso de referencia memorizado, así como al menos una señal de posición son alimentados a una unidad de generación de impulsos de referencia, que conecta el impulso de referencia en función del impulso de referencia memorizado y de la aparición de una condición de ajuste y se desconecta en el caso de que aparezca una condición de reposición y la condición de ajuste y de reposición se pueden derivar a partir de la al menos una señal de posición.
Además, el cometido de la invención es indicar un procedimiento para la generación de un impulso de referencia con posición... [Seguir leyendo]
Reivindicaciones:
1. Disposición para la generación de un impulso de referencia (Rl) para un aparato de medición de la posición, que comprende una incorporación de medición (10) con al menos una pista incremental (20) y con al menos una marca de referencia (32) , así como comprende una unidad de exploración (40) para la generación de señales de posición (P0, P90) a través de exploración de la al menos una pista incremental (20) y para la generación de un impulso analógico de referencia (Rl_A) a través de la exploración de la al menos una marca de referencia (32) , en la que ! la aparición del impulso analógico de referencia (Rl_A) es registrada en una unidad de memoria de impulsos de referencia (200) como impulso de referencia memorizado (Rl_M) ,
! el impulso de referencia memorizado (Rl_M) y al menos una señal de posición (P0, P90) son alimentados a una unidad de generación de impulsos de referencia (220) , que conecta el impulso de referencia (Rl) en función del impulso de referencia memorizado (Rl_M) y de la aparición de una condición de ajuste y se desconecta en el caso de que aparezca una condición de reposición y la condición de ajuste y de reposición se pueden derivar a partir de la al menos una señal de posición (P0, P90) .
2. Disposición de acuerdo con la reivindicación 1, en la que al menos dos señales de posición (P0, P90) , que presentan un desplazamiento de fases entre sí, son alimentadas a un discriminador de la dirección (210) , con el que se puede generar a través de la fijación de la posición de las fases de las al menos dos señales de posición (P0, P90) una señal de dirección (DIR) , que indica la dirección del movimiento, porque la señal de dirección (DIR) es alimentada a la unidad de generación de impulsos de referencia (220) y se puede seleccionar la condición de ajuste y la condición de reposición en la unidad de generación de impulsos de referencia (220) en función de la señal de dirección (DIR) .
3. Disposición de acuerdo con la reivindicación 2, en la que el discriminador de la dirección (210) comprende dos comparadores (310) , con lo que a partir de las señales de posición (P0, P90) se pueden generar señales digitales de posición (PD0, PD90) y la señal de dirección (IR) se puede generar a través de la determinación del nivel digital de una segunda señal de posición (PD90) en el instante de un flanco de la señal (T) de una primera señal digital de posición (PD0) .
4. Disposición de acuerdo con una de las reivindicaciones anteriores, en la que la condición de fijación y la condición de reposición son derivadas desde una primera señal de posición (P0) y desde una segunda señal de posición (P90) y en la que la condición de fijación en una primera dirección del movimiento es la transición de la segunda señal de posición (P90) < primera señal de posición (P0) hacia la segunda señal de posición (P90) > primera señal de posición (P0) y en una segunda dirección del movimiento es la transición de la primera señal de posición (P0) < segunda señal de posición (P90) hacia la primera señal de posición (P0) > segunda señal de posición (P90) y en la que la condición de reposición es, respectivamente, la aparición, que sigue a la aparición de la señal de fijación, de la misma transición que la condición de fijación y en la que en la unidad de generación de impulsos de referencia (220) se pueden calcular los instantes de la aparición de la condición de fijación / condición de reposición después de la comparación de los niveles de las señales de posición (P0, P90) en un tercer comparador (330) .
5. Disposición de acuerdo con una de las reivindicaciones anteriores, en la que los componentes digitales de la disposición están integrados en un CPLD o FPGA.
6. Procedimiento para la generación de un impulso de referencia (RI) para un aparato de medición de la posición, que comprende una incorporación de medición (10) con al menos una pista incremental (20) y al menos una marca de referencia (32) , así como una unidad de exploración (40) para la generación de señales de posición (P0, P90) a través de la exploración de la al menos una pista incremental (20) y para la generación de un impulso analógico de referencia (RI_A) a través de la exploración de la al menos una marca de referencia (32) , con las siguientes etapas:
! registro de la aparición del impulso analógico de referencia (RI_A) en la unidad de memoria de impulsos de referencia (200) y emisión del impulso de referencia memorizado (RI_M) a la unidad de generación del impulso de referencia (220) ,
! conexión del impulso de referencia (RI) en la unidad de generación de impulsos de referencia (220) en función del impulso de referencia memorizado (RI_M) y de la aparición de una condición de fijación, que se puede derivar a partir de al menos una señal de posición (P0, P90) ,
! desconexión del impulso de referencia (RI) en la unidad de generación de impulsos de referencia (220) después de la aparición de una condición de reposición, que se puede derivar de al menos una señal de posición (P0, P90) .
7. Procedimiento de acuerdo con la reivindicación 6, en el que la condición de fijación y la condición de reposición se establecen en función de la dirección del movimiento con la ayuda de una señal de dirección (DIR) , que se genera en un discriminador de la dirección (210) .
8. Procedimiento de acuerdo con la reivindicación 7, en el que en el discriminador de la dirección (210) se generan por medio de dos comparadores (310) a partir de las señales de posición (P0, P90) señales digitales de posición (PD, PD90) y la señal de dirección (DIR) es generada a través de la determinación del nivel digital de una segunda señal de posición digital (PD90) en el instante de un flanco de la señal (T) de una primera señal digital de posición (PD0) .
9. Procedimiento de acuerdo con una de las reivindicaciones 6 a 8, en el que la condición de fijación y la condición de reposición son derivadas desde una primera señal de posición (P0) y desde una segunda señal de posición (P90) y en el que la condición de fijación en una primera dirección del movimiento es la transición de la segunda señal de 10 posición (P90) < primera señal de posición (P0) hacia la segunda señal de posición (P90) > primera señal de posición (P0) y en una segunda dirección del movimiento es la transición de la primera señal de posición (P0) < segunda señal de posición (P90) hacia la primera señal de posición (P0) > segunda señal de posición (P90) y en la que la condición de reposición es, respectivamente, la siguiente aparición, que sigue a la aparición de la señal de fijación, de la misma transición que la condición de fijación y se calculan los instantes de la aparición de la condición de fijación / condición de reposición en la unidad de generación de impulsos de referencia (220) a través de la comparación de los niveles de las señales de posición (P0, P90) en un tercer comparador (330) .
10. Procedimiento de acuerdo con una de las reivindicaciones 6 a 9, en el que la unidad de generación de impulsos de referencia (220) genera después de la conexión del impulso de referencia (RI) una señal de reposición (CLR) para el borrado del impulso de referencia memorizado (RI_M) en la unidad de memoria de impulsos de referencia (200) .
11. Aparato de medición de la posición, que comprende una incorporación de medición (10) con al menos una pista incremental (20) y con al menos una marca de referencia (32) , así como una unidad de exploración (40) para la generación de señales de posición (P0, P90) a través de la exploración de la al menos una pista incremental (20) y para la generación de un impulso analógico de referencia (RI_A) a través de la exploración de la al menos una marca de referencia (32) , en el que el aparato de medición de la posición comprende, además, una disposición para la generación de un impulso de referencia (RI) de acuerdo con una de las reivindicaciones 1 a 5.
FIG. 2
FIG. 3
FIG. 4
FIG. 6
FIG. 7
FIG. 8
Patentes similares o relacionadas:
Rodamiento que comprende un captador de desplazamiento angular, del 17 de Junio de 2020, de HUTCHINSON: Rodamiento que comprende un casquillo de rodamiento y un captador inductivo de desplazamiento angular de dicho casquillo de rodamiento, comprendiendo […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Procedimiento y aparato para codificación magnética seccional continua para medición de par en ejes grandes, del 18 de Marzo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para codificación de un eje , de acuerdo con la reivindicación 6, que comprende: (a) suministrar corriente a una primera posición […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Encoder de posición absoluta, del 28 de Agosto de 2019, de FAGOR AUTOMATION S.COOP: Encoder de posición absoluta, que comprende una regla graduada con una pista incremental y una pista absoluta , y una cabeza lectora que puede […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
 Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, del 26 de Junio de 2019, de ROTORK CONTROLS LIMITED: Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, incluyendo el aparato:
[…]
Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, del 26 de Junio de 2019, de ROTORK CONTROLS LIMITED: Aparato adaptado para proporcionar una indicación de una posición angular de un elemento de entrada a lo largo de múltiples vueltas, incluyendo el aparato:
[…]