Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo.
Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos (22) de marcación medidos en diferentes momentos,
que se determinan mediante la recepción de manera selectiva con respecto a la dirección de ondas sonoras radiadas o emitidas por el objetivo por medio de una disposición de captadores (86) de sonido submarino de una instalación receptora de sónar, caracterizado porque el procedimiento presenta las siguientes etapas:
a) calcular una primera evolución (40) de la marcación a partir de un número predeterminado k de ángulos de marcación determinados en último lugar,
b) calcular una segunda evolución (42) de la marcación a partir de un número predeterminado i de ángulos de marcación anteriores determinados antes de los k,
c) calcular en cada caso un ángulo (56, 58) de marcación esperado de ambas evoluciones (40, 42) de marcación en un momento (54) actual,
d) calcular una diferencia de ángulos de marcación (/d/) de ambos ángulos (56, 58) de marcación esperados en el momento (54) actual,
e) comparar la diferencia de ángulos de marcación (/d/) con uno o varios valores umbral (C1, C2),
f) determinar un punto (72) de intersección de ambas evoluciones (40, 42) de marcación así como un momento (74) correspondiente a ese punto (72) de intersección al alcanzar y/o superar la diferencia de ángulos de marcación (/d/) el o los valores umbral (C1, C2),
g) generar una señal (75) de información sobre la detección del cambio de rumbo y/o cambio de velocidad del objetivo y proporcionar el momento (74) determinado del cambio de rumbo y/o cambio de velocidad.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2010/000197.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRÜCKER HEERSTRASSE 235 28309 BREMEN ALEMANIA.
Inventor/es: STEINER, HANS-JOACHIM, STEIMEL, ULRICH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/58 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Sistemas de determinación de velocidad o trayectoria; Sistemas de determinación del sentido del movimiento.
- G01S3/808 G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
PDF original: ES-2458890_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo La invención se refiere a un procedimiento así como a un dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo según el preámbulo de la reivindicación 1 y 9, respectivamente.
En la técnica de los sónares para la determinación pasiva de datos de objetivo de un vehículo portador, por ejemplo un barco de superficie o un submarino, se utilizan habitualmente sensores de diferentes tipos para la recepción de manera selectiva con respecto a la dirección de ondas sonoras. A este respecto, por sensor se entiende una antena receptora hidroacústica, también denominada antena submarina, como por ejemplo una base de cilindro, una antena lateral o una antena colgante.
Para desde el vehículo portador determinar la posición, la velocidad y el rumbo de un objetivo, por ejemplo de un barco de superficie, de un submarino o un cuerpo propulsado submarino, como denominados datos de objetivo sin desvelar los propios, en un procedimiento conocido como procedimiento TMA (procedimiento de análisis de movimiento de objetivo, Target Motion Analyses) para la determinación pasiva de datos de objetivo por medio de una instalación receptora de sónar se recibe el sonido radiado por el objetivo, es decir reflejado o generado obligatoriamente por el objetivo (por ejemplo por la máquina marina o bombas, etc.) , o emitido y se mide un ángulo de marcación con respecto al objetivo. A partir de ángulos de marcación medidos, consecutivos en el tiempo así como posiciones propias del vehículo portador correspondientes a estos ángulos de marcación se estiman los datos de objetivo del objetivo. Para ello se usa por ejemplo un procedimiento, que de manera iterativa determina una banda objetivo, para la que la suma de desviaciones cuadráticas ponderadas entre los ángulos de marcación medidos y los estimados correspondientes a esta banda objetivo es mínima. Un procedimiento de este tipo se describe por ejemplo en el documento DE 34 46 658 C2 o en INCE L ET AL: “An evolutionar y computing approach for the target motion analysis (TMA) problem for underwater tracks”, EXPERT SYSTEMS WITH APPLICATIONS, OXFORD, GB LNKD-DOI: 10.1016/J.ESWA.2008.02.046, tomo 36, n.º 2, 1 de marzo de 2009, páginas 3866-3879.
Por el documento DE 103 52 738 A1 se conoce un procedimiento para acortar el tiempo de iteración. Para ello se preestablecen valores límite para la distancia y/o el rumbo y/o la velocidad del objetivo. Especificaciones aproximadas acortan ya el tiempo de cálculo y posibilitan que se descarten estimaciones de posiciones de objetivo, que sería imposible registrar con la instalación receptora de sónar.
En los procedimientos conocidos para determinar datos de objetivo se recurre en cada caso a ángulos de marcación de un intervalo de tiempo predeterminado anterior para una estimación de datos de objetivo actual. Es decir, se tiene en cuenta la evolución de la marcación de objetivo a lo largo de un intervalo de tiempo predefinido largo y se usa esta evolución para la estimación de datos de objetivo actual. Por tanto, para la determinación de un nuevo conjunto de datos de objetivo se recurre a los ángulos de marcación medidos del periodo de tiempo anterior y se someten a un filtrado. Por tanto, la estimación de datos de objetivo es bastante lenta y eventualmente tras una maniobra del objetivo, es decir un cambio de rumbo y/o de velocidad, no vuelve a proporcionar resultados acertados hasta después de un tiempo que corresponde a la duración del filtrado. Por consiguiente la maniobra del objetivo debe haber sucedido tan atrás en el tiempo, que ya no entre en el periodo de tiempo considerado por la duración del filtrado.
La estimación de datos de objetivo proporciona de manera fiable buenos datos de objetivo cuando el objetivo se mueve de manera uniforme en relación con el vehículo portador. Sin embargo, en cuanto el objetivo cambia su rumbo y/o su velocidad, los datos de objetivo estimados empeoran de manera significativa y no vuelven a converger hasta que el objetivo sigue desplazándose mucho tiempo sin aceleración con un rumbo constante.
Convencionalmente, una maniobra del objetivo se detecta porque una estimación de datos de objetivo buena, ya convergente, de un procedimiento TMA empeora de nuevo. Sin embargo, esto sólo es posible cuando ya existe una solución de TMA convergente. Si una maniobra del objetivo tiene lugar, por ejemplo, poco después del inicio del seguimiento, el TMA aún no ha calculado ninguna solución convergente y por consiguiente no puede detectarse la maniobra del objetivo.
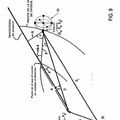
Los ángulos de marcación de un objetivo medidos por medio de la instalación receptora de sónar representan, considerados a lo largo de un periodo de tiempo, una evolución de la marcación de este objetivo detectado. El documento DE 10 2007 019 445 A1 muestra por ejemplo un procedimiento para generar seguimientos de marcación que indican el objetivo para varios objetivos que radian sonido, que se marcan en una zona marítima. Para el caso de que no exista una recepción continua de la instalación receptora de sónar, el documento WO 99/17134 muestra un procedimiento para vincular un seguimiento de marcación fijado tras una pausa con un grupo de seguimientos de marcación fijados antes de la pausa, comparándose el primer seguimiento de marcación con cada seguimiento de marcación del grupo y realizándose para cada comparación cálculos con respecto al movimiento entre dos posiciones. Si se representa gráficamente la evolución de la marcación, por ejemplo en una representación en cascada poniendo en un primer eje los ángulos de marcación medidos y en un segundo eje el tiempo, una maniobra del objetivo genera en la evolución de la marcación un recodo pronunciado de manera diferente. Para un observador del modelo en cascada, en particular un usuario, existe la posibilidad de detectar visualmente una maniobra del objetivo e indicar un momento correspondiente de la maniobra del objetivo. Sin embargo, el requisito previo para ello es un recodo claramente pronunciado en la evolución de la marcación. La desventaja de una detección visual de una maniobra del objetivo por parte del usuario radica en que posiblemente no se detecte un recodo pronunciado de una manera menos clara en la evolución de la marcación.
Por tanto, la invención se basa en el objetivo de detectar automáticamente en todo momento maniobras del objetivo, es decir un cambio de rumbo y/o un cambio de velocidad de un objetivo, e indicar un momento correspondiente a esta maniobra del objetivo.
La invención soluciona el problema mediante un procedimiento con las características de la reivindicación 1 así como un dispositivo con las características de la reivindicación 9.
Por medio de una disposición de captadores de sonido submarino, tales como transductores electroacústicos u optoacústicos de una instalación receptora de sónar, se miden ángulos de marcación para un objetivo, mediante los cuales se determinan dos evoluciones de marcación. Para ello se registran los ángulos de marcación con respecto al objetivo a lo largo del tiempo.
Según la invención se fija un periodo de tiempo de procesamiento. Éste consiste al menos en la suma de un número i y de un número k de ángulos de marcación determinados en último lugar. Puede estar previsto incluir entre el número i y el número k un número h predefinido adicional de ángulos de marcación determinados, que sin embargo no se tienen en cuenta en el cálculo de las evoluciones de marcación.
En primer lugar, a partir de los i+k ángulos de marcación determinados en último lugar se determinan dos evoluciones de marcación, calculándose la 1ª evolución de la marcación a partir de los k ángulos de marcación más actuales y la segunda evolución de la marcación a partir de los i ángulos de marcación antiguos, que se determinaron antes de los k.
Basándose en estas dos evoluciones de marcación en un momento actual en cada caso puede calcularse un ángulo de marcación esperado de ambas evoluciones de marcación. La invención ha reconocido que en el caso de una maniobra del objetivo, es decir de un cambio de rumbo y/o cambio de velocidad del objetivo, los ángulos de marcación esperados de ambas evoluciones de marcación difieren entre sí.
A continuación, a partir del ángulo de marcación esperado de la primera y del ángulo de marcación esperado de la segunda evolución de la marcación se calcula una diferencia de ángulos de marcación en el momento actual. En caso de un movimiento uniforme del objetivo, las dos evoluciones de marcación calculadas están muy cerca la una de la otra. Es decir, la diferencia... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos (22) de marcación medidos en diferentes momentos, que se determinan mediante la recepción de manera selectiva con respecto a la dirección de ondas sonoras radiadas o emitidas por el objetivo por medio de una disposición de captadores (86) de sonido submarino de una instalación receptora de sónar, caracterizado porque el procedimiento presenta las siguientes etapas:
a) calcular una primera evolución (40) de la marcación a partir de un número predeterminado k de ángulos de marcación determinados en último lugar,
b) calcular una segunda evolución (42) de la marcación a partir de un número predeterminado i de ángulos de marcación anteriores determinados antes de los k,
c) calcular en cada caso un ángulo (56, 58) de marcación esperado de ambas evoluciones (40, 42) de marcación en un momento (54) actual,
d) calcular una diferencia de ángulos de marcación (IdI) de ambos ángulos (56, 58) de marcación esperados en el momento (54) actual,
e) comparar la diferencia de ángulos de marcación (IdI) con uno o varios valores umbral (C1, C2) ,
f) determinar un punto (72) de intersección de ambas evoluciones (40, 42) de marcación así como un momento (74) correspondiente a ese punto (72) de intersección al alcanzar y/o superar la diferencia de ángulos de marcación (IdI) el o los valores umbral (C1, C2) ,
g) generar una señal (75) de información sobre la detección del cambio de rumbo y/o cambio de velocidad del objetivo y proporcionar el momento (74) determinado del cambio de rumbo y/o cambio de velocidad.
2. Procedimiento según la reivindicación 1, caracterizado porque los ángulos (22) de marcación medidos a lo largo de un periodo (24) de tiempo predeterminado se someten a un filtrado (32) previo para su suavizado, determinándose para este periodo (24) de tiempo un ruido de marcación ( () así como una velocidad de deriva de marcación (BP) .
3. Procedimiento según la reivindicación 2, caracterizado porque el número k de ángulos (26) de marcación filtrados previamente de la primera evolución (40) de la marcación así como el número i de ángulos (26) de marcación filtrados previamente de la segunda evolución (42) de la marcación se fijan en función del ruido de marcación ( () .
4. Procedimiento según la reivindicación 2 ó 3, caracterizado porque se fijan un primer y un segundo valor umbral (C1, C2) teniendo en cuenta la velocidad de deriva de marcación (BP) para indicar la fiabilidad del cambio de rumbo y/o cambio de velocidad del objetivo detectados.
5. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque en cada caso se realiza una aproximación lineal de la primera evolución (40) de la marcación y la segunda evolución (42) de la marcación.
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la señal (75) de información sobre la detección del cambio de rumbo y/o cambio de velocidad del objetivo se indica de manera óptica y/o acústica a un usuario y/o se pone a disposición como señal de datos para un procesamiento adicional, en particular un procedimiento TMA.
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque se emite un valor correspondiente a la diferencia de ángulos de marcación (IdI) , representando este valor una medida de la probabilidad de un posible cambio de rumbo y/o cambio de velocidad.
8. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la señal (75) de información se inhibe durante la duración de una maniobra propia y/o tras la detección de un cambio de rumbo y/o cambio de velocidad del objetivo durante un periodo de tiempo predeterminado.
9. Dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos (22) de marcación medidos en diferentes momentos, que pueden determinarse mediante la recepción de manera selectiva con respecto a la dirección de ondas sonoras radiadas o emitidas por el objetivo por medio de una disposición de captadores (86) de sonido submarino de una
instalación receptora de sónar, en particular para realizar un procedimiento según una de las reivindicaciones 1 a 8, caracterizado por
un módulo (90) de aproximación para calcular una primera evolución (40) de la marcación a partir de un número predeterminado k de ángulos de marcación determinados en último lugar y una segunda evolución (42) de la marcación de un número predeterminado i de ángulos de marcación anteriores determinados antes de los k ángulos de marcación,
una unidad (92) de cálculo para calcular en cada caso un ángulo (56, 58) de marcación esperado de ambas evoluciones (40, 42) de marcación en un momento (54) actual,
un módulo (94) de diferencia para determinar una diferencia de ángulos de marcación (IdI) en el momento (54) actual,
un módulo (96) de detección de valores umbral para realizar una comparación de la diferencia de ángulos de marcación (IdI) con uno o varios valores umbral (C1, C2) ,
una unidad (98) de cálculo adicional para determinar un momento (74) correspondiente al punto (72) de intersección de ambas evoluciones (40, 42) de marcación al alcanzar y/o superar la diferencia de ángulos de marcación (IdI) de los valores umbral (C1, C2) ,
una unidad (100) de señal para generar una señal (75) de información sobre la detección del cambio de rumbo y/o cambio de velocidad del objetivo,
una unidad (102) de emisión para proporcionar el momento (74) determinado del cambio de rumbo y/o cambio de velocidad así como la señal (75) de información correspondiente.
10. Dispositivo según la reivindicación 9, caracterizado por una unidad (88) de filtrado previo para suavizar los ángulos (22) de marcación medidos a lo largo de un periodo (24) de tiempo predeterminado, pudiendo determinarse para este periodo (24) de tiempo un ruido de marcación ( () así como una velocidad de deriva de marcación (BP) .
11. Dispositivo según una de las reivindicaciones 9 a 10, caracterizado por una unidad (104) de desactivación para inhibir la unidad (102) de emisión durante la duración de una maniobra propia y/o tras reconocer un cambio de rumbo y/o cambio de velocidad del objetivo durante un periodo de tiempo predeterminado.
12. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado por una unidad (97) de determinación de umbral para fijar uno o varios valores umbral (C1, C2) , pudiendo determinarse los valores umbral (C1, C2) en función de límites predeterminados.
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento para generar rutas de localizador que jalonan la puntería, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, […]
 Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Sistemas y métodos para desambiguar posiciones de un tirador, del 23 de Mayo de 2012, de Raytheon BBN Technologies Corp: Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicosseparados cuando una […]
MÉTODO PARA IDENTIFICAR UN REBUFO, del 2 de Marzo de 2012, de Raytheon BBN Technologies Corp: Un método para identificar una señal de rebufo dentro de una señal generada por una matriz de sensores acústicos que forman una antena, que comprende: definir […]
 SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR, del 9 de Febrero de 2011, de BBN TECHNOLOGIES CORP.: Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende: medir señales solamente […]
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETIVOS IRRADIADORES DE SONIDO., del 1 de Enero de 2006, de ATLAS ELEKTRONIK GMBH: Procedimiento para la localización pasiva de objetivos irradiadores de sonido mediante la determinación de un ángulo de marcación con respecto al objetivo y una distancia […]
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS, del 30 de Enero de 2012, de ATLAS ELEKTRONIK GMBH: Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el […]