Procedimiento para manejar un automóvil, así como automóvil con una instalación de detección del entorno.
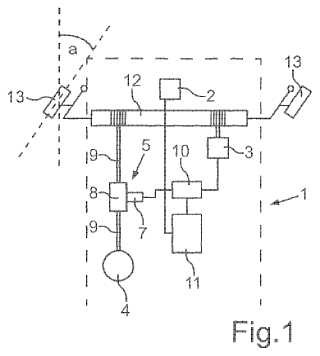
Procedimiento para el manejo de un automóvil (1) con una instalación de detección del entorno (2),
undispositivo de maniobra del ángulo de dirección (3), el cual está configurado para ajustar un ángulo dedirección (a) del automóvil (1) con independencia de un operador, un volante (4) para el ajuste manual deun ángulo de dirección (a) del automóvil (1) por parte de un operador y un dispositivo de desacoplamiento(5) para el desacoplamiento al menos en parte de un movimiento giratorio del volante (4) desde unatransposición del ángulo de dirección (a) del automóvil (1) causado por el dispositivo de maniobra delángulo de dirección (3), con los pasos:
a) detección de un objeto (6) en el entorno (E) del automóvil (1) mediante la una instalación de deteccióndel entorno (2);
b) evaluación de un peligro de colisión del automóvil (1) con el objeto (6), y
c) transposición del ángulo de dirección (a) del automóvil (1) mediante el dispositivo de maniobra delángulo de dirección (3) en dependencia de la evaluación,
caracterizado por el paso
d) desacoplamiento del volante (4) en dependencia de la transposición del paso c) con el dispositivo dedesacoplamiento (5), de manera que el movimiento giratorio del volante (4) es menor debido a latransposición del ángulo de dirección (a), que en el caso de que la misma transposición ocurriese conel volante (4) no desacoplado, donde el grado de desacoplamiento es dependiente de una velocidady/o una frecuencia de transposición del ángulo de dirección (a) y aumenta con el aumento de lavelocidad y/o frecuencia de la transposición.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11009008.
Solicitante: AUDI AG.
Inventor/es: REICHEL,MICHAEL, LIMBACHER,REIMUND.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
PDF original: ES-2445716_T3.pdf
Fragmento de la descripción:
Procedimiento para manejar un automóvil, así como automóvil con una instalación de detección del entorno La invención se refiere a un procedimiento para manejar un automóvil con una instalación de detección del entorno, un dispositivo de maniobra del ángulo de dirección, el cual está configurado para ajustar un ángulo de dirección del automóvil con independencia de un operador, un volante para el ajuste manual de un ángulo de dirección de automóvil por parte de un operador y un dispositivo de desacoplamiento para el al menos desacoplamiento parcial de un movimiento giratorio del volante desde una transposición del ángulo de dirección del automóvil causada por el dispositivo de maniobra del ángulo de dirección, con los pasos: a) detección de un objeto en el entorno del automóvil mediante la instalación de detección del entorno; b) evaluación de un peligro de colisión del automóvil con el objeto; y c) transposición del ángulo de dirección del automóvil en dependencia de la evaluación mediante el dispositivo de maniobra del ángulo de dirección. La invención se refiere también a un automóvil con una instalación de detección del entorno.
Se conocen los más diversos sistemas de asistencia al conductor para la asistencia a un conductor de vehículo durante la conducción de un automóvil. Se conocen por ejemplo sistemas de asistencia al conductor, los cuales asumen tareas de conducción transversal, en cuanto que aplican sobre el sistema de dirección del automóvil un momento de giro del volante adicional. Con este momento de giro de volante adicional el vehículo ha de guiarse a un carril determinado conforme a parámetros predeterminados. Un ejemplo de esto es el llamado Heading Control: este sistema de asistencia al conductor tiene como meta regular el vehículo de tal manera que se mueva a lo largo del centro del carril. Un sistema de cámaras con procesamiento de imágenes incorporado detecta para ello los datos del entorno necesarios. Adicionalmente se evalúan datos de sensor del vehículo (velocidad, aceleración transversal, etc.) . A partir de ello puede calcularse en una instalación de procesamiento de datos el momento de giro de volante adicional que ha de conseguirse con la ayuda de un algoritmo adecuado.
Los sistemas de asistencia al conductor para la conducción transversal pueden estar configurados como sistemas puramente de alerta o como sistemas de actuación automática. El llamado sistema LDW (Lane Departure Warning) utiliza una alerta vibratoria para alertar al conductor del vehículo del abandono del carril particularmente en la proximidad de los bordes del carril de conducción. El llamado sistema LDW plus aplica además de ello un momento de giro de volante, el cual devuelve el automóvil al carril. Los algoritmos LDW subyacentes aquí son sistemas puramente de alerta. Los llamados sistemas HC (Heading Control Assist) sirven para el mantenimiento del vehículo en el centro del carril. En el caso del sistema HC Assist hay un llamado Fairway, el cual representa una banda de conducción predeterminable, dentro de la cual no se da un movimiento de volante activo. Es a partir de una determinada distancia del vehículo con el centro del carril, cuando el vehículo es devuelto a su carril original. En el caso del sistema HC Continuous desaparece este Fairway, de manera que los movimientos de volante se notan constantemente en el volante. Mediante el acoplamiento fijo del volante con el sistema de dirección automático, el conductor nota todos los movimientos. Con una asistencia de dirección continuada y los movimientos de volante constantes que conlleva, el volante parece desarrollar una vida propia.
Del documento DE 10 2008 008 182 A1 se conoce un automóvil con un volante, una columna de dirección que puede girarse mediante el volante, así como una barra de control desplazable de manera trasversal, que está acoplada en movimiento con dos ruedas a guiar. Además de ello, el automóvil comprende un mecanismo transmisor de superposición asignado a la columna longitudinal, mediante el cual puede superponerse un ángulo de giro generado por el giro del volante a un ángulo de giro generado mediante un servomotor acoplado con el mecanismo transmisor de superposición para generar un ángulo de giro de superposición que sirve para el movimiento de la barra de control. Además de ello, el automóvil comprende también un sistema de asistencia al conductor con una instalación para dar un momento de giro de volante separado que sirve para el movimiento de la barra de control para la conducción transversal activa del vehículo. El mecanismo transmisor de superposición puede regularse en este caso de tal manera mediante el servomotor, que un giro de la columna de dirección generado por la instalación como consecuencia de un momento de giro de volante separado es compensado al menos en parte de tal manera que el movimiento de giro del volante real resultante es menor en comparación con el movimiento de giro del volante teórico resultante del momento de giro del volante dado.
Del documento DE 10 2007 016 799 B4 se conoce un procedimiento para la asistencia al conductor de un vehículo. El vehículo comprende en este caso una dirección con un accionamiento de volante para conseguir un movimiento de giro en el volante.
En el marco del procedimiento se detecta un objeto en el entorno del vehículo que representa un peligro para el vehículo. En este momento ocurre un desacoplamiento del volante desde una rueda del vehículo encarrilada, llevándose a cabo un movimiento de giro en el volante que se realiza en la dirección que es contraria a la dirección de la maniobra de desvío. Se ejerce por lo tanto activamente un movimiento de giro brusco en forma de impulso sobre el volante para alertar al conductor del peligro y para provocar una conducción contraria tipo reflejo.
Del documento DE 199 52 227 B4 se conoce un procedimiento para el control de una conducción de un vehículo, donde la dirección del vehículo comprende tanto un volante convencional como también un accionamiento regulador de ángulo de rueda que puede llevar a cabo un proceso de conducción de manera autónoma e independiente de un operador. El volante está en este caso desacoplado del accionamiento regulador de ángulo de rueda durante un proceso de conducción autónomo mediante un acoplamiento. En el marco del procedimiento puede insertarse el acoplamiento en caso de avería del accionamiento regulador de ángulo de rueda.
En el documento DE 10 2006 044 179 A1 se describen un procedimiento y un dispositivo para asistir a un conductor al llevar a cabo la maniobra de dirección. El conductor ha de realizar la maniobra de conducción en este caso al menos en una gran parte de manera automática, con lo que el conductor experimenta al aplicar un impulso de rotación sobre un dispositivo de conducción una intervención indicadora de la conducción en la vía de conducción del vehículo. En una rueda manejable del automóvil puede ajustarse en la rueda un ángulo de dirección adicional además del ángulo de dirección ordenado por el conductor. La magnitud del momento de giro ejercido sobre el dispositivo de conducción se determina con independencia de la velocidad del automóvil y/o de la velocidad relativa del automóvil en relación con un objeto.
En el documento US 2005/0203705 A1 se describe un sistema de asistencia al conductor que puede detectar obstáculos delante del vehículo y que ajusta con independencia de la detección una relación de trasferencia de un mecanismo transmisor de conducción del vehículo. De esa manera se da a un conductor la posibilidad de lograr un gran ángulo de dirección ya con un movimiento de conducción pequeño.
Es tarea de la invención poner a disposición un procedimiento, así como un automóvil con los cuales se reduzca el riesgo para el conductor del vehículo, así como para otros participantes en el tráfico.
Esta tarea se soluciona mediante un procedimiento, el cual presenta las características de la reivindicación 1, así como con un automóvil, el cual presenta las características de la reivindicación 8.
La invención se refiere a un procedimiento para manejar un automóvil con una instalación de detección del entorno, la cual puede estar configurada particularmente como sensor para la detección de un espacio anterior. El automóvil comprende también un dispositivo de maniobra de ángulo de dirección, que está configurado para ajustar un ángulo de dirección del automóvil con independencia de un operador. Junto a ello el automóvil comprende un volante para el ajuste manual del ángulo de dirección del automóvil por parte de un operador. Finalmente el automóvil comprende un dispositivo de desacoplamiento para el desacoplamiento al menos... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el manejo de un automóvil (1) con una instalación de detección del entorno (2) , un dispositivo de maniobra del ángulo de dirección (3) , el cual está configurado para ajustar un ángulo de dirección (a) del automóvil (1) con independencia de un operador, un volante (4) para el ajuste manual de un ángulo de dirección (a) del automóvil (1) por parte de un operador y un dispositivo de desacoplamiento (5) para el desacoplamiento al menos en parte de un movimiento giratorio del volante (4) desde una transposición del ángulo de dirección (a) del automóvil (1) causado por el dispositivo de maniobra del 10 ángulo de dirección (3) , con los pasos:
a) detección de un objeto (6) en el entorno (E) del automóvil (1) mediante la una instalación de detección del entorno (2) ;
b) evaluación de un peligro de colisión del automóvil (1) con el objeto (6) , y
c) transposición del ángulo de dirección (a) del automóvil (1) mediante el dispositivo de maniobra del 15 ángulo de dirección (3) en dependencia de la evaluación,
caracterizado por el paso d) desacoplamiento del volante (4) en dependencia de la transposición del paso c) con el dispositivo de desacoplamiento (5) , de manera que el movimiento giratorio del volante (4) es menor debido a la transposición del ángulo de dirección (a) , que en el caso de que la misma transposición ocurriese con el volante (4) no desacoplado, donde el grado de desacoplamiento es dependiente de una velocidad y/o una frecuencia de transposición del ángulo de dirección (a) y aumenta con el aumento de la velocidad y/o frecuencia de la transposición.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que en el paso d) ocurre un desacoplamiento completo del volante (4) , de manera que el volante (4) no realiza ningún movimiento 25 giratorio con cada transposición del ángulo de dirección (a) .
3. Procedimiento según la reivindicación 1, caracterizado por el hecho de que para una transposición del ángulo de dirección (a) en el paso c) en lo que se refiere a un ángulo de dirección de modificación (Δa) , el cual es menor que un nivel determinado (a0) predeterminado, no ocurre en el paso d) un desacoplamiento del volante (4) y para una transposición del ángulo de dirección (a) en el paso c) en lo que se refiere a un ángulo de dirección de modificación (Δa) , el cual es mayor o igual al nivel determinado (a0) predeterminado, ocurre en el paso d) un desacoplamiento del volante (4) .
4. Procedimiento según una de las reivindicaciones anteriores caracterizado por el hecho de que el dispositivo de desacoplamiento comprende un dispositivo de superposición (5) con un servomotor (7) y particularmente un mecanismo transmisor (8) , el cual se engrana de tal forma de manera desacoplante en el movimiento giratorio de una columna de dirección (9) giratoria a través del volante (4) , que un giro de la columna de dirección (9) causada por el dispositivo de maniobra del ángulo de dirección (3) , conduce a un movimiento giratorio menor del volante (4) , que en el caso de que no hubiese tenido lugar la intervención.
5. Procedimiento según la reivindicación 4, caracterizado por el hecho de que el desacoplamiento es causado por un dispositivo de control (10) , el cual está configurado para accionar de tal manera el dispositivo de maniobra del ángulo de dirección (3) , que genera una transposición del ángulo de dirección (a) del automóvil (1) , y está configurado para accionar el servomotor (7) en dependencia del accionamiento del dispositivo de maniobra del ángulo de dirección (3) .
6. Procedimiento según una de las reivindicaciones anteriores, caracterizado por el hecho de que el desacoplamiento del volante (4) con el dispositivo de desacoplamiento (5) siempre ocurre cuando ocurre 45 una transposición del ángulo de dirección (a) del automóvil (1) mediante el dispositivo de maniobra del ángulo de dirección (3) .
7. Procedimiento según una de las reivindicaciones anteriores, caracterizado por el hecho de que la instalación de detección del entorno comprende un sensor de distancia (2) y/o un sensor de ultrasonidos y/o una cámara y/o un sensor de radar y/o un sensor lidar.
8. Automóvil (1) con una instalación de detección del entorno (2) , la cual está configurada para detectar un
objeto (6) en el entorno del automóvil (1) , un dispositivo de maniobra del ángulo de dirección (3) , el cual
está configurado para ajustar un ángulo de dirección (a) del automóvil (1) con independencia de un
5 operador, un volante (4) para el ajuste manual de un ángulo de dirección (a) del automóvil (1) por parte de un operador, un dispositivo de desacoplamiento (5) para el desacoplamiento al menos en parte de un
movimiento giratorio del volante (4) desde una transposición del ángulo de dirección (a) del automóvil (1)
causado por el dispositivo de maniobra del ángulo de dirección (3) , y un dispositivo de procesamiento de
datos (11) , el cual está configurado para evaluar en dependencia de datos relativos a un objeto (6)
10 detectado por la instalación de detección del entorno (2) un peligro de colisión del automóvil (1) con el objeto (6) y establecer en dependencia de la evaluación una transposición del ángulo de dirección (a) del
automóvil (1) , donde
el dispositivo de procesamiento de datos (11) está configurado para determinar de tal manera, en
dependencia de la transposición determinada, un desacoplamiento del volante (4) mediante el dispositivo
15 de desacoplamiento (5) de manera que el movimiento giratorio resultante del volante (4) es menor durante la realización de la transposición determinada del ángulo de dirección (a) , que en el caso de que la misma
transposición ocurriese con un volante (4) no desacoplado,
caracterizado por el hecho de que
el grado de desacoplamiento es dependiente de una velocidad y/o una frecuencia de transposición del
ángulo de dirección (a) , y aumenta con el aumento de la velocidad o frecuencia de la transposición.
20
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]
Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]