PROCEDIMIENTO DE CONTROL DE UN ROBOT INDUSTRIAL QUE SE DESPLAZA SEGUN UNA TRAYECTORIA DADA.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO PPARA EL CONTROL DEL MOVIMIENTO DE UN ROBOT INDUSTRIAL A LO LARGO DE UN CAMINO DADO (P1-P4) CON UNA VELOCIDAD DESEADA (V),
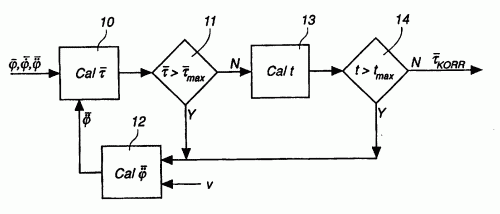
DICHO ROBOT INDUSTRIAL TIENE UN NUMERO DE EJES DE MOVIMIENTO Y POR CADA EJE EQUIPO DE SERVOCONTROL DEL MOVIMIENTO AXIAL DE ACUERDO CON VALORES DE REFERENCIA ( TA KORR ) SUMINISTRADOS CON ESE FIN. PRIMERO, SE CALCULAN ESOS ANGULOS ( HI I ) QUE SE NECESITAN P PARA ASUMIR LA PROXIMA POSICION SOBRE EL CAMINO. DEPENDIENDO DE LOS ANGULOS AXIALES Y DE UN PRIMER MODELO MATEMATICO, QUE DESCRIBE LAS PROPIEDADES DINAMICAS Y ESTATICAS DEL ROBOT, SE CALCULA PPARA CADA UNO DE LOS EJES DE MOVIMIENTO EL PAR ( TA =( TA SUB,1 , TA 2 ... TA 6 )) QUE SE NECESITA PPARA ASU MIR LA PROXIMA POSICION. LA CARGA (T) SE CALCULA EN UNO O MAS PUNTOS CRITICOS MECANICAMENTE PPARA LOS ANGULOS AXIALES CALCULADOS ( HI I ) CON LA AYUDA DE UN SEGUNDO MODELO MATEMATICO, QUE DESCRIBE LA CARGA DEL ROBOT EN LOS PUNTOS CRITICOS. PPARA CADA UNO DE LOS EJES, EL PAR CALCULADO ( TA ) SE COMPPARA CON UN PAR MAXIMO PERMISIBLE ( TA MAX ), Y LA CARGA (T) SE COMPPARA CON UNA CARGA MAXIMA PERMISIBLE (T MAX ) PPARA EL PUNTO CRITICO. SI EL PAR CALCULADO EXCEDE EL PAR MAXIMO PERMISIBLE PPARA CUALQUIER EJE, O SI LA CARGA CALCULADA EXCEDE LA CARGA MAXIMA PERMISIBLE PPARA CUALQUIER PUNTO CRITICO, ENTONCES LA VELOCIDAD (V) SE REDUCE Y LOS VALORES DE REFERENCIA PPARA EL SISTEMA SERVO TA KORR = ( TA KORR1 , TA KORR2 ... TA KORR6 ) SE CALCULAN DEPENDIENDO DE LA VELOCIDAD REDUCI DA.
Tipo: Resumen de patente/invención.
Solicitante: ASEA BROWN BOVERI AB.
Nacionalidad solicitante: Suecia.
Dirección: ,721 83 VASTERAS.
Inventor/es: ELFVING, STAFFAN, SNELL, JOHN-ERIK.
Fecha de Publicación: .
Fecha Solicitud PCT: 15 de Enero de 1997.
Fecha Concesión Europea: 17 de Julio de 2002.
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Países PCT: Bélgica, Alemania, España, Francia, Reino Unido, Italia, Suecia, Oficina Europea de Patentes.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]