14 inventos, patentes y modelos de SIMON MATA,ANTONIO
Dispositivo intra-oral de regulación mandibular.
(13/11/2019) Dispositivo intra-oral de regulación mandibular, que comprende:
- una férula superior configurada para adaptarse a un maxilar superior de un paciente y una férula inferior configurada para adaptarse a una mandíbula inferior de dicho paciente;
- al menos un seguidor y al menos una superficie de contacto (3a) sobre la que contacta el seguidor ; donde la férula superior y la férula inferior interactúan entre sí mediante el seguidor y la superficie de contacto (3a); y donde la mandíbula inferior es situable en diferentes posiciones respecto del maxilar superior ; caracterizado por que la superficie de contacto (3a) está definida por una curva según la…
DISPOSITIVO ABSORBEDOR DE VIBRACIONES PARA CATENARIAS RÍGIDASBAJO CUBIERTA.
(16/10/2017) 1. Dispositivo absorbedor de vibraciones para catenarias rígidas bajo cubierta, destinado a reducir los despegues producidos entre un pantógrafo y una catenaria rígida que discurre bajo una cubierta , dispositivo que comprende:
- una estructura de unión superior, para suspensión de una cubierta ,
- una grifa inferior para apoyo sobre la catenaria rígida ,
- un aislador eléctrico vinculado a la grifa para evitar la transmisión de corrientes eléctricas de la catenaria rígida , y
- un mecanismo absorbedor central para atenuación de las vibraciones transmitidas por la catenaria rígida ,
estando el dispositivo absorbedor caracterizado porque el mecanismo absorbedor comprende unos cuerpos elásticos para absorción de las vibraciones…
Sistema de dirección con geometría variable.
(25/11/2014) Sistema de dirección con geometría variable que permite un ajuste rápido y sencillo de la geometría de la dirección del vehículo, lo que permite modificar su comportamiento durante la conducción. La dirección de la invención fundamentalmente comprende: una tija superior y una tija inferior esencialmente paralelas; una horquilla de suspensión que comprende al menos una barra conectada entre la tija superior y a la tija inferior ; y un eje de la dirección conectado entre la tija superior y la tija inferior , donde las conexiones entre las tijas superior e inferior y, respectivamente, la al menos una barra de la horquilla de suspensión y el eje de la dirección , están configuradas para permitir un giro y una traslación relativos entre dicha horquilla de suspensión y dicho eje de la dirección .
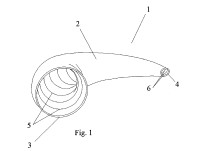
TOBERA DE INYECCIÓN PARA LA MEJORA AERODINÁMICA EN VEHÍCULOS.
(02/08/2013) Tobera de inyección para la mejora aerodinámica en vehículos.
Tobera de inyección para la mejora aerodinámica de vehículos, en particular motocicletas, que comprende un cuerpo principal alargado de forma curvada y sección variable, con una boca de entrada de aire en un primer extremo, para la recogida del flujo de aire incidente y, una boca de salida en un segundo extremo, para la salida del mismo.
El aire recogido por la boca de entrada es conducido a contracorriente por el cuerpo principal hasta la boca de salida, modificando el perfil aerodinámico del vehículo. El cuerpo principal puede comprender medios que eviten el desprendimiento de la capa límite y…
TOBERA DE INYECCIÓN PARA LA MEJORA AERODINÁMICA EN VEHÍCULOS.
Sección de la CIP Técnicas industriales diversas y transportes
(04/07/2013). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B62K11/00, B62D35/00.
Tobera de inyección para la mejora aerodinámica de vehículos, en particular motocicletas, que comprende un cuerpo principal alargado de forma curvada y sección variable, con una boca de entrada de aire en un primer extremo, para la recogida del flujo de aire incidente y, una boca de salida en un segundo extremo, para la salida del mismo. El aire recogido por la boca de entrada es conducido a contracorriente por el cuerpo principal hasta la boca de salida, modificando el perfil aerodinámico del vehículo. El cuerpo principal puede comprender medios que eviten el desprendimiento de la capa límite y medios que aumentan la velocidad de salida del flujo de aire.
(29/11/2011) Robot esférico, que comprende una carcasa esférica en la que se alojan una base portante y un mecanismo de actuación . La base portante apoya sobre la superficie interna de la carcasa mediante elementos de rodadura y tiene el centro de gravedad situado por debajo del centro geométrico de la carcasa esférica. El mecanismo de actuación esta compuesto por dos ruedas , cada una accionada por un motor, que transmite movimiento a la carcasa
SISTEMA DE FRENADO PARA AUTOMOVIL CON PREDICCION DE ADHERENCIA Y CONTROL CONTINUO DE PRESION DE FRENADA.
(17/08/2011) Sistema de frenado para automóvil con predicción de adherencia y control continuo de presión de frenada, que comprende un circuito hidráulico donde es regulada la presión de frenado mediante el control de una válvula proporcional de presión, la cual mantiene la presión necesaria en el pistón de freno para realizar la frenada adecuada. El control de la frenada es realizado en todo momento por un sistema de control capaz de conocer la adherencia existente en cada instante y establecer las condiciones idóneas de presión en el pistón de frenada, produciéndose en todo instante un control óptimo de dicha presión y consiguiendo que en…
APARATO QUIRURGICO DE LAPAROSCOPIA Y ENDOSCOPIA.
(24/05/2010) Aparato quirúrgico de laparoscopia y endoscopia que puede emplearse en operaciones con una sola incisión. Consta de una camisa que se introduce en el tejido a través de la incisión, sobre la que se fija un cuerpo y, sobre éste, una tapa en la que van insertados un número variable de subconjuntos , cuya misión es servir de acceso y soporte a los instrumentos necesarios para hacer la intervención, a la vez que el sistema de cierre garantiza la estanqueidad de sistema. Lleva una entrada de gas provista con una llave de paso , para la introducción del gas que se desee emplear con objeto de propiciar una atmósfera adecuada en la zona de la intervención
PROTESIS DE DISCO INTERVERTEBRAL DE APLICACION UNIVERSAL.
Sección de la CIP Necesidades corrientes de la vida
(18/12/2009). Ver ilustración. Solicitante/s: SYNTHES GMBH. Clasificación: A61F2/44D2, A61F2/44.
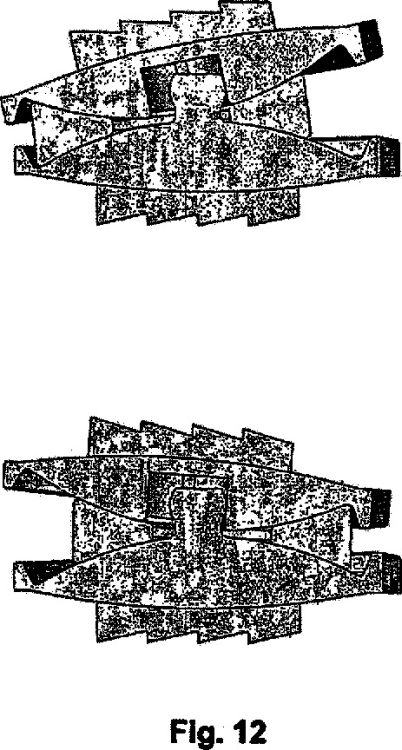
Un Modelo de Prótesis de Disco, Intervertebral, del tipo de los denominados de doble articulación, para sustituir la función y elmovimiento de los discos intervertebrales, de aplicación universal debido a su característica principal de poder usarse como prótesis constreñida, semi-constreñida o no constreñida, especialmenteindicada para tratamiento de patología degenerativa del disco intervertebral, hernias discales por vía anterior, síndromes de transición del disco suprayacente, lumbalgias crónicas resistentes al tratamiento conservador, inestabilidades vertebrales crónicas contiguas, fabricada con materiales de probada biocompatibilidad,dotada de un bajo perfil que la hace óptima para su implantaciónen el ser humano y que consta de tres piezas; dos platillos, superior e inferior, y una pieza intermedia, que sirve para la sustitución de los discos de la columna lumbar y cervical, siendo susceptible de colocarse por vía anterior o por vía lateral.
BANCO DE HOMOLOGACION DE ENGANCHES.
Sección de la CIP Física
(01/02/2009). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M19/00, G01N3/36B, G01N3/36.
Banco de homologación de enganches, para dispositivos mecánicos de acoplamientos de vehículos de motor, sus remolques y su sujeción a dichos vehículos, llevándose a cabo ensayos de resistencia y de funcionamiento. En los dispositivos de acoplamiento se comprobará la resistencia mediante el ensayo dinámico (ensayo de resistencia). El ensayo dinámico se llevará a cabo con carga aproximadamente senoidal (alternativa o pulsátil), con el número de ciclos que resulte adecuado para el material, no debiéndose producir grietas ni fracturas. El banco comprende una estructura rígida que sustenta el cabezal de transmisión de movimientos al enganche, proporcionando mediante un servocilindro la fuerza en módulo y dirección indicada en la directiva 94/20/CE. El sistema también es capaz de controlar los movimientos y leer de los distintos sensores, a través de un computador central, que además hace de interfaz con el usuario.
BANCO DE ENSAYO DINAMICO DE NEUMATICOS DE SUPERFICIE PLANA.
Sección de la CIP Física
(01/02/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M17/02.
Banco de ensayo dinámico de neumáticos de superficie plana, el cual permite simular y estudiar el comportamiento dinámico del neumático en condiciones operativas controlables y repetitivas en laboratorio. El banco se compone de una estructura rígida que sustenta el cabezal de transmisión de movimientos al neumático (ángulo de caída y deriva y desplazamiento vertical) y una banda de rodadura flexible de acero inoxidable, sobre la que se apoya el neumático, esta banda gira mediante unos tambores, uno fijo y otro móvil, con un sistema para la corrección de la banda, que evita la salida de está, el carro que soporta la banda está apoyado sobre unas guías lineales permitiendo el movimiento lateral, con lo cual sobre el neumático se pueden aplicar unas cargas verticales y laterales variables con el tiempo. El sistema también es capaz de controlar los movimientos y leer de los distintos sensores, a través de un computador central, que además hace de interfaz con el usuario.
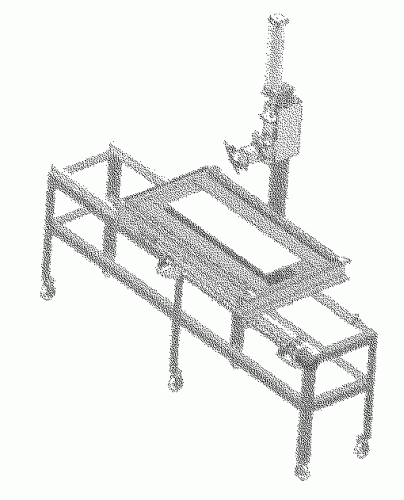
SISTEMA MEDIDOR DE LA DISTRIBUCION DE PRESIONES NORMALES Y DE LA GEOMETRIA DEL CONTACTO EN LA HUELLA DE CONTACTO DE NEUMATICOS CON SU PISTA DE RODADURA.
Sección de la CIP Física
(16/01/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M17/02, G01L17/00.
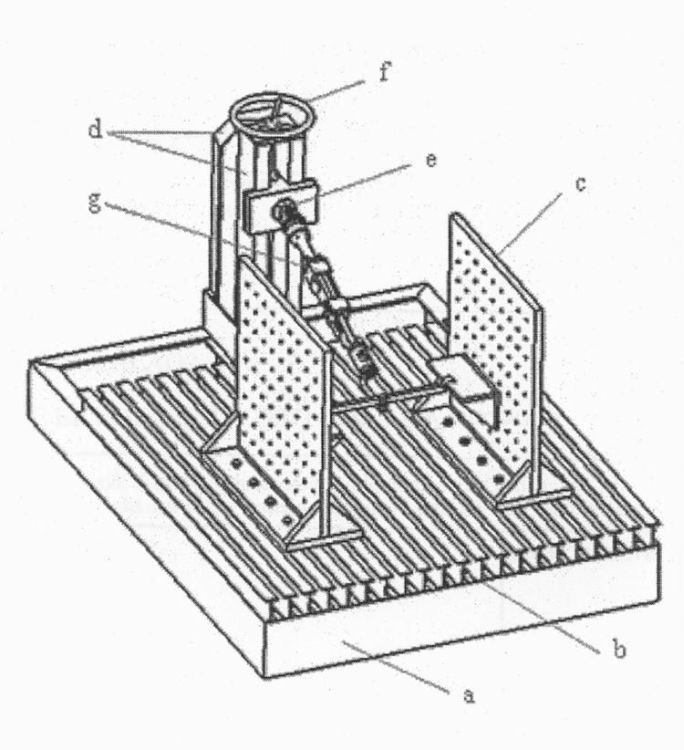
Sistema medidor de la distribución de presiones normales y de la geometría del contacto en la huella de contacto de neumáticos con su pista de rodadura. El sistema comprende una estructura soporte a modo de mesa sobre la que se instalan el resto de dispositivos. Sobre la mesa se dispone el marco soporte en el que se apoyará una plancha de cristal sobre la que rodará el neumático. Entre el neumático y la plancha de cristal se coloca una lámina de material plástico ajustado a las características del ensayo a realizar. El neumático es cargado mediante un sistema cilindro- pistón. El resto de dispositivos necesarios incluyen un motor eléctrico y guías de rodadura lineal para dotar al marco soporte de desplazamiento lineal así como tubos fluorescentes para la iluminación de las planchas de cristal y todo el sistema de adquisición de imágenes.
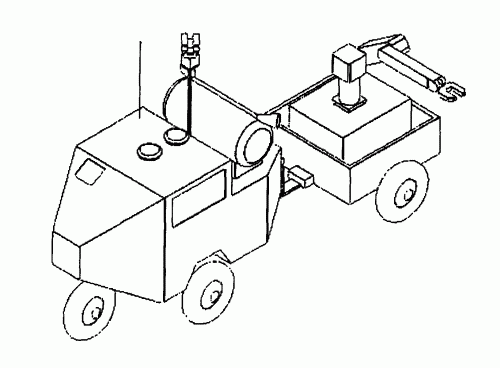
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
VEHICULO ROBOTICO CON CAPACIDAD DE NAVEGACION AUTONOMA DOTADO DE BRAZO ARTICULADO PARA LA MANIPULACION REMOTA DE OBJETOS.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, B25J5/00, B25J9/06, B25J15/02.
Vehículo robótico con capacidad de navegación autónoma dotado de brazo articulado para la manipulación remota de objetos. La presente invención consiste en una máquina programable de uso general compuesta de un vehículo con capacidad de navegación en interiores y de un brazo articulado dotado de una garra servo- controlada para el manejo remoto de objetos. El sistema robot comprende un sistema de manipulación autónomo, un sistema de locomoción que emplea ruedas, un sistema sensorial complejo y diverso, un sistema de control basado en una red de computadores, un sistema de alimentación eléctrica por baterías y un sistema de comunicaciones radio con estaciones remotas. El robot está preparado para desenvolverse en entornos estructurados, como edificios, almacenes o fábricas. Las tareas que es capaz de realizar el sistema robot incluyen coger, transportar y soltar pequeños objetos tales como libros o cintas de video y presionar o girar dispositivos sencillos como interruptores o picaportes.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}