Procedimiento y dispositivo para la detección automática de la configuración de elementos luminosos conectados en serie.
(27/05/2020) Procedimiento para hacer funcionar un dispositivo de iluminación de una instalación de manejo de vehículos , que comprende un primer tramo con un número N de módulos luminosos conectados en serie, que pueden activarse individualmente y están equipados cada uno de ellos con al menos un elemento luminoso, y que comprende un segundo tramo con un número adicional N' de módulos luminosos conectados en serie, que pueden activarse individualmente y están equipados cada uno de ellos con al menos un elemento luminoso, en donde los módulos luminosos están conectados dentro de un tramo cada uno de ellos mediante un circuito, caracterizado porque el procedimiento comprende los siguientes pasos:
detección de la configuración de los módulos…
Instalación de tratamiento de vehículos con reconocimiento de presencia.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(05/06/2019). Solicitante/s: WASHTEC HOLDING GMBH. Clasificación: B60S3/04, B60S3/00, G07F17/20.
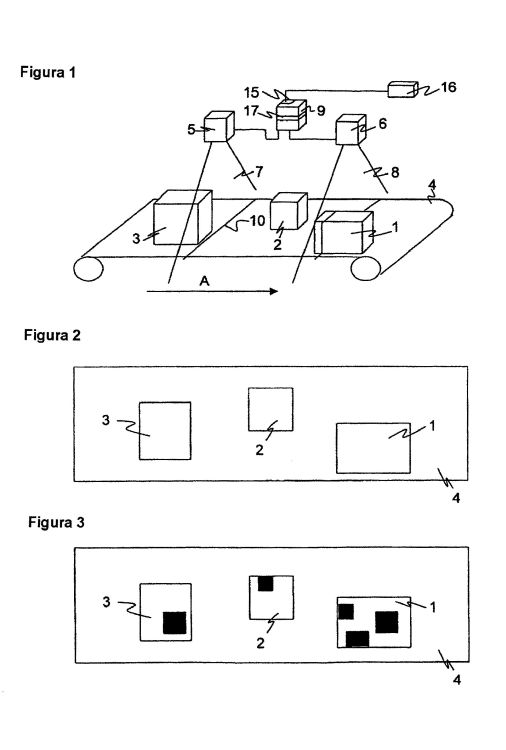
Instalación de tratamiento de vehículos , en particular, instalación de tratamiento de vehículos de autoservicio, con:
al menos un dispositivo de tratamiento ;
un panel de mando sensible al contacto para el manejo de la instalación de tratamiento de vehículos ; y
un dispositivo de control , que está configurado para transformar en un primer modo de funcionamiento una influencia externa que actúa sobre el panel de mando en instrucciones para el control del al menos un dispositivo de tratamiento ,
caracterizada por:
un equipo de detección para detectar la presencia o ausencia de un usuario en un área predefinida de la instalación de tratamiento de vehículos , donde,
en caso de ausencia del usuario en el área predefinida, el dispositivo de control cambia a un segundo modo de funcionamiento en el que la influencia externa no tiene ninguna repercusión sobre las instrucciones emitidas por el dispositivo de control.
PDF original: ES-2741638_T3.pdf
Clasificación de objetos así como reconocimiento de su posición y orientación en el espacio.
(09/07/2012) Procedimiento para la clasificación de objetos y para el reconocimiento de su posición y orientación en elespacio, en que con una disposición captadora con resolución de distancia son generados puntos de datos delobjeto medido para una superficie del objeto medido y con ayuda de datos de objeto modelado previamentedeterminados son planteadas y verificadas a partir de los puntos de datos del objeto medido hipótesis acerca de laclase, la posición y la orientación de un objeto medido , en que varias pruebas de hipótesis diferentes sonrealizadas en cascada de tal modo que sólo en caso de verificación de una hipótesis mediante una prueba dehipótesis es realizada una prueba de hipótesis subsiguiente dentro de la cascada, hasta que por fallo de una pruebade hipótesis una hipótesis es falsificada o por paso completo a través de la cascada…
PROCEDIMIENTO Y DISPOSITIVO PARA LA GENERACION DINAMICA Y TRANSMISION DE DATOS GEOMETRICOS.
Sección de la CIP Física
(21/10/2009). Ver ilustración. Solicitante/s: SICK AG. Clasificación: G01B11/04, G01B21/06.
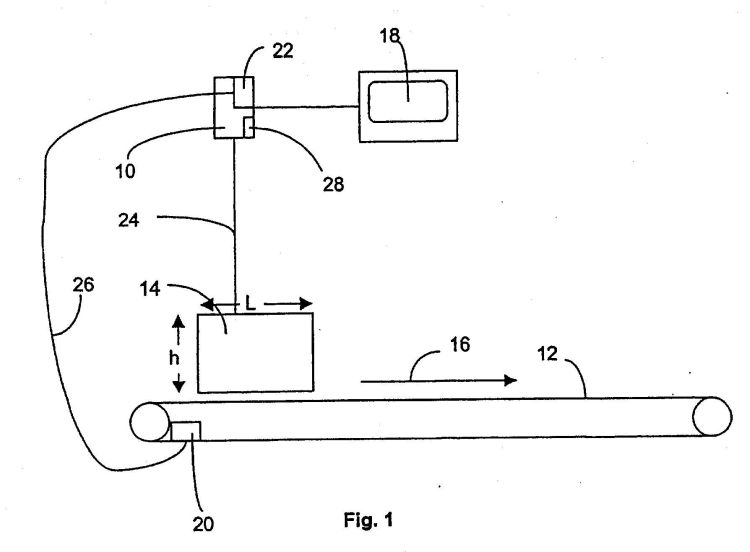
Dispositivo de medición de la geometría de un objeto para la generación y transmisión dinámicas de datos de la geometría de objetos móviles sobre una instalación de transporte , en el que el dispositivo presenta un primer sensor optoelectrónico , que está configurado para la detección de la geometría del objeto en una sección del objeto con la ayuda de distancias y/o del comportamiento de remisión, así como un primer control , que calcula a partir de la geometría de cada sección del objeto datos de la geometría y puede emitirlos a través de una primera interfaz, caracterizado porque el primer control está configurado para adaptar la densidad de información de los datos emitidos de la geometría a una medida para modificaciones de la geometría del objeto de una sección a otra.
DISPOSITIVO Y PROCEDIMIENTO PARA LA VIGILANCIA DE OBJETOS EN MOVIMIENTO.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(16/12/2008). Ver ilustración. Solicitante/s: SICK AG. Clasificación: G01B11/04, B07C3/14.
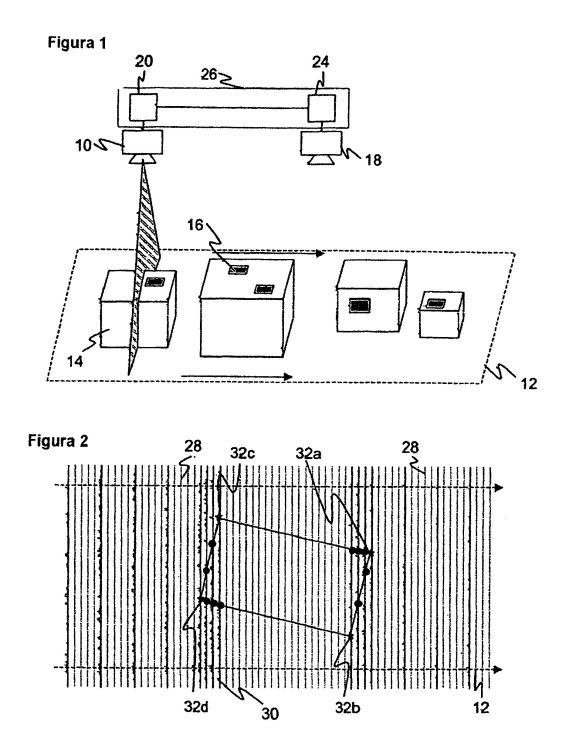
Dispositivo para la vigilancia de objetos móviles a través del campo de visión de una cámara con una instalación para la selección de zonas de interés, que solamente están asociadas en cada caso a una parte del campo de visión de la cámara , en el que un circuito de evaluación está diseñado para evaluar solamente todavía aquellos contenidos de la imagen detectados por la cámara , que están asociados a las zonas de interés determinadas previamente, caracterizado porque un escáner de láser , que está diseñado para la determinación de la distancia de las superficies del objeto dirigidas hacia el mismo y para la determinación de la posición de estas superficies del objeto, está integrado en la cámara o está conectado delante o detrás de ésta en la dirección de movimiento (A) de los objetos , y porque el escáner de láser está acoplado con el circuito de evaluación para el cálculo de las zonas de interés en función de las distancias y posiciones calculadas.
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SENSOR OPTICO.
Sección de la CIP Física
(01/05/2008). Ver ilustración. Solicitante/s: SICK AG. Clasificación: G01B11/04, G01D7/00, G01D3/024.
Procedimiento para el funcionamiento de un sensor óptico para la medición de una magnitud (L) física de un objeto por medio de un escalón definido y sujeto a un certificado de calibrado, dependiendo la exactitud de medición alcanzable de la magnitud (L) a medir de al menos una condición externa, caracterizado porque según la exactitud de medición alcanzable se recurre a un determinado escalón calibrable para la medición de la magnitud física y cuando varía la condición externa se conmuta, se conmuta el escalón alcanzable de acuerdo con la exactitud de medida alcanzable.
DISPOSITIVO Y PROCEDIMIENTO PARA LA VIGILANCIA DE OBJETOS EN MOVIMIENTO.
(01/02/2008) Dispositivo para la detección de objetos móviles a través del campo de visión de un sensor óptico (6, 6'', 6") con una instalación para la selección de zonas de interés, que solamente están asociadas en cada caso a una parte del campo de visión del sensor óptico (6, 6'', 6"), caracterizado porque un medidor de distancia está integrado en el sensor óptico (6, 6'', 6") o está conectado delante o detrás de éste en la dirección de movimiento (A) de los objetos , porque el medidor de distancia está diseñado para la determinación de las distancias de las superficies de los objetos dirigidas hacia el medidor de distancia y está acoplado con un circuito de evaluación (9, 9'', 9") para el cálculo de las zonas de interés en función de las distancias calculadas, porque el circuito de evaluación (9, 9'', 9")…
PROCEDIMIENTO PARA EL RECONOCIMIENTO OPTICO DE CARACTERES ALFANUMERICOS.
(01/12/2006) Procedimiento para el reconocimiento óptico de caracteres alfanuméricos con las siguientes etapas: a) en una base de datos se depositan los contornos exteriores y los contornos interiores poligonales de caracteres de referencia y su asociación de la posición geométrica mutua como curvas de referencia transformadas y normalizadas en el espacio de las tangentes; b) el contorno exterior y los contornos interiores de un carácter a reconocer son explorados ópticamente y son convertidos en datos binarios; c) el contorno exterior y los contornos interiores del carácter a reconocer son aproximados a través de un polígono, cuyas secciones rectas son transformadas y normalizadas para la generación de curvas de caracteres en el espacio de las tangentes; d) para comparar…
{kind=link}
{kind=link}
{kind=link}