34 inventos, patentes y modelos de SALLEN ROSELLO,CESAR
Sistema adaptado a un robot para manipular objetos voluminosos.
(22/05/2019) Un sistema adecuado para adaptarse a un robot que presenta un brazo articulado rematado en pinza, comprendiendo el sistema, para cada una de las hojas que conforma la pinza , un brazo fijado a dicha hoja, estando conformado cada brazo por:
• un primer tramo y un segundo tramo telescópicos entre sí;
• el extremo libre del primer tramo , que se fija a la correspondiente hoja de la pinza , y;
• un cuerpo de asido de los objetos que está unido al extremo libre del segundo tramo por medio de una rótula de unión, estando el sistema caracterizado por que el primer tramo que conforma el brazo telescópico tiene la capacidad de unirse a cualquiera de las hojas de la pinza de manera intercambiable por medio de un cuerpo para anclar dicho primer tramo a la hoja correspondiente de la pinza ; el primer tramo…
Secciones de la CIP Necesidades corrientes de la vida Química y metalurgia
(18/05/2017). Solicitante/s: INGENIERIA Y CONTROL DEL FUEGO, S.L. Clasificación: A62D1/00, C09K21/00.
Composición ignifuga, compuesta por: agua: 45,25-61,25% en peso; conservante: 0,100,14% en peso; cola vegetal: 1,65-1,813% en peso;micro esferas de vidrio: 3,50-3,90% en peso; talco: 27,50-35,90% en peso y arena de sílice: 6,20-10,30% y porque presenta una densidad de 1,042a 1,082g/cm3, facilitando su trasiego y aplicación por los medios antiincendios convencionales, teniendo una doble función al actuar como substancia protectora contra el fuego, a modo de barrera cortafuegos,y como substancia de ataque contra el fuego de aplicación directa para ser apagado. Además, la composición es ecológica y transpirable, por lo que no afecta a las variedades vegetales, permitiendo, la creación de barreras cortafuegos de total eficacia.
SISTEMA SENSOR PARA VALLADO PROTECTOR.
Secciones de la CIP Construcciones fijas Física
(20/10/2016). Solicitante/s: PROYTECSA SECURITY, S.L. Clasificación: E04H17/14, G08B13/12.
Sistema sensor para vallado protector, siendo del tipo de vallados compuestos por una serie de postes anclados al terreno entre los que se disponen diferentes tipos de mallas, incorporando unos medios detectores de intento de intrusión, de forma que el sistema sensor comprende: al menos, un cable sensor, mimetizado y/o embebido en el propio vallado,de un número variable de fibrasópticas; mangueras blindadas de enlace dando continuidad al cable sensor en accesos, túneles, puentes,pasos elevados, etc.; cajas de fusión en el vallado para alojamiento de fusiones de fibras ópticas del cable sensor y de las mangueras blindadas de enlace, y; concentradores de control de zonas, donde confluyen cables sensores en sí mismos o a través de las mangueras blindadas de enlace, donde se dilucidan los diferentes eventos de las distintas zonas allí confluyentes y desde donde se transmiten a un centro de control.
BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO.
(26/05/2016) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico accionado por un tercer cilindro…
SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(26/05/2016). Solicitante/s: PROYTECSA SECURITY, S.L. Clasificación: F41H11/16, F42B33/06, F41B9/00.
Soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena de agua o mezcla de agua y anticongelante, con objeto de que mediante su disparo contra un material explosivo se evite su detonación, siendo fijados a un lateral de un brazo articulado de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos y cuyo soporte, fijado a la cara externa de las hojas de la pinza en la que se remata el brazo articulado del robot, presenta una forma general anular acogiendo, en posición centrada, al disrruptor y estando provisto de un saliente radial en su parte distal, que acoge un elemento óptico o una cámara de video.
Secciones de la CIP Necesidades corrientes de la vida Química y metalurgia
(20/01/2016). Solicitante/s: SALLEN ROSELLO,CESAR. Clasificación: A62D1/00, C09K21/00.
Composición ignifuga, compuesta por: agua: 45,25-61,25% en peso; conservante: 0,10-0,14% en peso; cola vegetal: 1,65-1,813% en peso; microesferas de vidrio: 3,50-3,90% en peso; talco: 27,50-35,90% en peso y arena de silice: 6,20-10,30% y porque presenta una densidad de 1,042 a 1,082 g/cm3, facilitando su trasiego y aplicación por los medios antiincendios convencionales, teniendo una doble función al actuar como substancia protectora contra el fuego, a modo de barrera cortafuegos, y como substancia de ataque contra el fuego de aplicación directa para ser apagado. Además, la composición es ecológica y transpirable, por lo que no afecta a las variedades vegetales, permitiendo, la creación de barreras cortafuegos de total eficacia.
PDF original: ES-2556912_A1.pdf
PDF original: ES-2556912_B2.pdf
Sistema sensor para vallado protector.
(22/10/2015) Sistema sensor para vallado protector, siendo del tipo de vallados compuestos por una serie de postes anclados al terreno entre los que se disponen diferentes tipos de mallas, incorporando unos medios detectores de intento de intrusión, de forma que el sistema sensor comprende: al menos, un cable sensor, mimetizado y/o embebido en el propio vallado, de un número variable de fibras ópticas; mangueras blindadas de enlace dando continuidad al cable sensor en accesos, túneles, puentes, pasos elevados, etc.; cajas de fusión en el vallado para alojamiento de fusiones de fibras ópticas del cable sensor y de las mangueras blindadas de enlace, y; concentradores de control de zonas, donde confluyen cables sensores en sí mismos o a través de las mangueras blindadas de enlace, donde se dilucidan los diferentes eventos de…
Robot para manipulación de artefactos sospechosos.
(17/09/2015) Robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de unos medios móviles de tracción, de especial aplicación, dadas sus reducidas dimensiones, para acceder a espacios reducidos, tales como el interior de autobuses, trenes y aviones, pudiendo inspeccionar, manipular y desactivar artefactos explosivos, incorporando en la superficie superior del cuerpo de tanqueta una base de giro con un sensor de carga y disponiendo de cuatro medios móviles de tracción, flippers, dos a cada lado del cuerpo de tanqueta, accionados por respectivos motores con correspondientes encoders, controlando la posición, velocidad y par, de forma independiente, y con una correa de tracción para cada medio móvil, accionadas por una pareja de motores para su transmisión dos a dos, y, unos sensores inerciales, así como unos sensores…
SISTEMA ADAPTADO A UN ROBOT PARA MANIPULAR OBJETOS VOLUMINOSOS.
(05/08/2015) Sistema adaptado a un robot para manipular objetos voluminosos, siendo del tipo de robots utilizados en operaciones de riesgo que disponen de un brazo articulado rematado en una pinza, giratoria 360º, para la manipulación de los objetos, de forma que el sistema se basa en que cada una de las hojas conformantes de la pinza se fija un brazo constituido por: un primer tramo y un segundo tramo telescópicos entre sí, de manera que el primer tramo, por su extremo libre, se fija a la correspondiente hoja de la pinza, y, al segundo tramo, por su extremo libre se une, a través de una rótula, un cuerpo de asido de los objetos.
Vehículo robotizado telecomandado.
(10/07/2015) Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta…
ROBOT CON SOPORTE PORTA HERRAMIENTAS.
(16/06/2015) Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo articulado, rematado en una pinza, a través de la cual manipulan los artefactos, de forma que el extremo libre del brazo articulado o la pinza incorporan una cámara de visión, y el cuerpo del robot monta un soporte porta herramientas, definido por una estructura de forma general en "U" que por sus alas se ancla al cuerpo del robot y en su alma presenta, al menos, dos habitáculos de alojamiento de respectivas herramientas asociadas a un conjunto definido por: la herramienta en sí; una batería de alimentación…
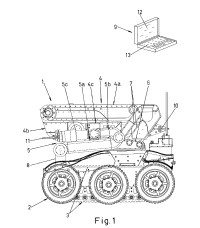
VEHÍCULO ROBOTIZADO TELECOMANDADO.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(28/05/2015). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Clasificación: G05D1/00, G05D1/02, B25J5/00, B25J9/00, B62D55/02.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen.
DISPOSITIVO DETECTOR DE INTRUSIÓN EN VALLAS DE SEGURIDAD.
(19/05/2015) Dispositivo detector de intrusión en vallas de seguridad, el cual es de especial aplicación para su montaje en aquellas vallas de seguridad, ya existentes, para la protección de vías de comunicación, aunque también puede ser aplicado en otro tipo de vallas de seguridad, y permite detectar el lugar donde se produce la intrusión con la ventaja de tener, prácticamente, un 0% de falsas alarmas. El dispositivo, básicamente se constituye por: una pluralidad de cables de fibra óptica multimodal mimetizados con las mallas metálicas conformantes de la valla de seguridad, una serie de analizadores de señal alojados en cajas estancas, a los que…
DISPOSITIVO DETECTOR DE INTRUSIÓN EN VALLAS DE SEGURIDAD.
(23/04/2015) Dispositivo detector de intrusión en vallas de seguridad, el cual es de especial aplicación para su montaje en aquellas vallas de seguridad, ya existentes, para la protección de vías de comunicación, aunque también puede ser aplicado en otro tipo de vallas de seguridad, y permite detectar el lugar donde se produce la intrusión con la ventaja de tener, prácticamente, un 0 % de falsas alarmas. El dispositivo, básicamente se constituye por: una pluralidad de cables de fibra óptica multimodal mimetizados con las mallas metálicas conformantes de la valla de seguridad, una serie de analizadores de señal alojados en cajas estancas, a los que se asocia, al menos, una pareja de cables de fibra óptica; una diversidad de concentradores de tecnología semejante a la de los analizadores de señal, estando alojados…
Brazo articulado telescópico robotizado.
(23/01/2015) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico…
SOPORTE PARA DISRRUPTOR ADAPTADO A UNA PINZA DE UN BRAZO ROBOTIZADO.
(04/12/2014) 1. Soporte para disrruptor adaptado a una pinza de un brazo robotizado, estando basado el disrruptor en un tubo o cañón en cuya recámara aloja un cartucho pirotécnico propelente y cuyo tubo o cañón se rellena de agua o mezcla de agua y anticongelante, con objeto de que mediante su disparo contra un material explosivo se evite su detonación, siendo fijados a un lateral de un brazo articulado de un robot de utilidad en la detección, manipulación y desarticulación de artefactos explosivos, caracterizado porque el soporte para disrruptor se fija a la cara externa de las hojas de una pinza en la que se remata el brazo articulado…
(30/07/2013) Vallado anti-intrusión, siendo de especial utilidad para su montaje en la protección de recintos, viales y largostrazados que requieran disponer de un cierto nivel de seguridad, así como en zonas fronterizas, con objeto de poderdetectar de una forma rápida, segura y fiable cualquier intento de acceso a través del vallado, el cual está basado enuna serie de postes, anclados al suelo, entre los que se montan respectivos módulos definidos por un marco con unentramado de alambre de acero, caracterizado por que:
- integrado en el entramado de los módulos , en posición horizontal hay, al menos, un alambre conductor, que define un detector pre-sensibilizado del entramado…
Secciones de la CIP Construcciones fijas Física
(07/02/2013). Ver ilustración. Solicitante/s: PROYTECSA SECURITY, S.L. Clasificación: E04H17/04, G08B13/12.
Valla anti-intrusión, de especial utilidad para su montaje en la protección de recintos viales y largos trazados que requieren de seguridad y cuya valla se basa en una pluralidad de postes entre los que se disponen mallas de alambre con objeto de poder detectar de una forma rápida, segura y fiable cualquier intento de acceso por corte de la malla de alambre, estando conformada la valla por: una pluralidad de mallas de alambre entrecruzado que incorporan, al menos, un elemento tubular , con un hilo conductor en su interior, enmascarado entre los propios alambres; una pluralidad de postes y; una pluralidad de cuerpos de tapa de cierre sobre las pestañas de los perfiles conformantes de la pluralidad de postes . Así, se consigue una valla de un sencillo y rápido montaje con un reducido coste y obtener una sensorización que ante el corte o vandalismo por impacto provoque una alarma en un centro de control.
SISTEMA DE CONTROL Y GESTIÓN DE LA TENSIÓN MECÁNICA DEL CABLE DE LA CATENARIA EN INFRAESTRUCTURAS FERROVIARIAS.
(05/11/2012) Sistema de control y gestión de la tensión mecánica del cable de la catenaria en infraestructuras ferroviarias, cuya catenaria se conforma por una serie de tramos enlazados desviados por uno de sus extremos para enrollarse en una polea y que están tensionadas por unos contrapesos, que comprende una galga extensiométrica intercalada en el tramo de cable de la catenaria (1a) desviado de la línea; una caja con una electrónica de función, gestión y comunicación; un cable eléctrico de conexión de la galga extensiométrica con la electrónica de función, gestión y comunicación, y; una comunicación de la electrónica…
(01/06/2012) 1. Valla anti-intrusión, la cual es de especial utilidad para su montaje en la protección de recintos viales y largos trazados que requieren de un cierto nivel de seguridad y cuya valla se basa en una pluralidad de postes anclados al terreno entre los que se disponen mallas de alambre con objeto de poder detectar de una forma rápida, segura y fiable cualquier intento de acceso por corte de la malla de alambre, caracterizada porque la valla anti-intrusión se conforma por:
- una pluralidad de mallas de alambre entrecruzado que incorporan, al menos, un elemento tubular , en posición horizontal, con un hilo conductor en su interior, enmascarado entre los propios alambres;
- una pluralidad de postes definidos por un perfil de sección…
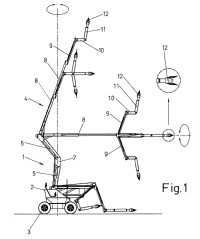
ROBOT TELECOMANDADO PARA OPERACIONES ESPECIALES.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Técnicas industriales diversas y transportes
(29/03/2012). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Clasificación: F41H11/16, B25J5/00, B25J19/02, B25J18/02.
Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia,de forma que el robot incorpora sobre el tren de rodadura una torreta , giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria , pudiendo utilizarse para la vigilancia de puntos estratégicos,así como de zonas fronterizas, e incluso, actuar como medio disuasorio al ser portador de, al menos, un arma defensiva intimidatoria.
SISTEMA DE CONTROL DE LA TENSION MECANICA DEL CABLE DE LA CATENARIA EN LA INFRAESTRUCTURAS FERROVIARIAS.
(04/07/2011) Sistema de control de la tensión mecánica del cable de la catenaria en infraestructuras ferroviarias, de utilidad en instalaciones ferroviarias cuya catenaria se conforma por una serie de tramos enlazados, que por uno de sus extremos se desvían para enrollarse en una primera polea, encontrándose tensionadas por unos contrapesos que comprende: una galga extensiométrica intercalada en el tramo de cable de la catenaria (1a) conducido hasta una primera polea de enrollamiento; una caja con una electrónica de función y comunicación; un cable eléctrico de conexión, y; una comunicación de la electrónica de función y comunicación, con un centro de control , para controlar permanentemente la tensión mecánica del cable de las catenarias de suministro de energía eléctrica a los trenes y conocer el estado de cada tramo de catenaria en tiempo…
ROBOT TELECOMANDO PARA OPERACIONES ESPECIALES.
(06/05/2011) 1. Robot telecomandado para operaciones especiales, siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo, tales como la manipulación de explosivos, los cuales disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, caracterizado porque el robot incorpora sobre el tren de rodadura una torreta , giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al…
COMPOSICION PROTECTORA Y CONTRA EL FUEGO Y USO.
(08/02/2010) Composición protectora y contra el fuego y uso, compuesta por: agua: 25-42% en peso; azul ultramar: 0,015-0,025% en peso; conservante: 0,09-0,15% en peso; ligante vegetal: 1,6-2,7% en peso; blanco de España: 6-10% en peso; carbonato de calcio: 33-56% en peso; sulfato de cal: 9-15% en peso, teniendo una doble función al actuar como sustancia protectora contra el fuego a la par que como sustancia de ataque contra el fuego, de forma que como sustancia protectora contra el fuego permite que al aplicarla o rociar la superficie a proteger, en caso de llegar el fuego a ella, actúe como barrera protectora evitando que el fuego la destruya o deteriore, mientras que como sustancia contra el fuego…
DISPOSITIVO DE CONTROL DE PASO.
(28/07/2009) 1. Dispositivo de control de paso, siendo del tipo de dispositivos montados para el control de personas para el paso a andenes de acceso a un medio de transporte público o acceso a edificios en general, estando constituido por unos muebles, entre los que se define el paso de las personas, cuyos muebles en su interior alojan los componentes de función del dispositivo, en tanto que los pasos se cierran por una pareja de hojas de vidrio, caracterizado porque el dispositivo se define por una estructura de paralelogramo deformable, estando constituido uno de sus lados por una hoja de vidrio y su lado opuesto está constituido por un travesaño , quedando unidos, giratoriamente, a los otros dos lados del paralelogramo deformable…
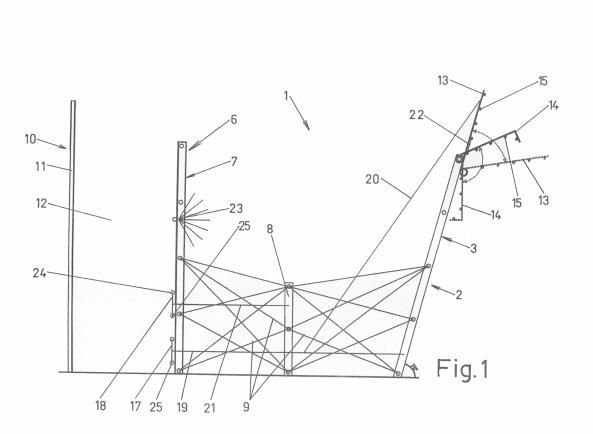
SISTEMA DE VALLADO PROTECTOR FRONTERIZO.
Secciones de la CIP Física Construcciones fijas
(07/05/2009). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.
INDRA SISTEMAS, S.A. Clasificación: G08B13/12, E04H17/02.
Sistema de vallado protector fronterizo, siendo de especial utilidad para su montaje en la protección de zonas fronterizas, que comprende una primera valla constituida por unos perfiles anclados en posición inclinada, entre los que se disponen unas sirgas de acero y una red metálica; una segunda valla , distanciada de la primera valla , constituida por unos perfiles , disponiendo entre ellos unas sirgas de acero y una red metálica; unos perfiles intermedios, de menor altura que los perfiles y de la primera y segunda valla, quedando entre los perfiles intermedios y la primera y segunda valla una diversidad de sirgas de acero entrecruzadas; unos medios y de alarma, montados en relación a la segunda valla , y; unos conductos de un fluido montados en relación a la segunda valla provistos de unas bocas de salida a presión hacia la zona de sirgas entrecruzadas.
(16/03/2009) 1. Valla anti-intrusión, siendo de especial utilidad para su montaje en la protección de recintos viales y largos trazados que requieran disponer de un cierto nivel de seguridad, así como en zonas fronterizas, con objeto, de poder evitar de una forma segura y fiable cualquier intento de acceso a través del vallado, el cual está basado en una serie de postes, anclados al terreno, entre los que se montan respectivos módulos definidos por un marco con un entramado de alambre de acero, caracterizada porque los postes anclados al terreno presentan una sección en "U" adosándose y fijándose a su alma un lateral del marco que conforma los dos módulos contiguos que confluyen en él, quedando…
(16/01/2009) 1. Vallado anti-intrusión, siendo de especial utilidad para su montaje en la protección de recintos viales y largos trazados que requieran disponer de un cierto nivel de seguridad, así como en zonas fronterizas, con objeto de poder detectar de una forma rápida, segura y fiable cualquier intento de acceso a través del vallado, el cual está basado en una serie de postes, anclados al terreno, entre los que se montan respectivos módulos definidos por un marco con un entramado de alambre de acero, caracterizado porque:#- en el entramado de los módulos se integra, en posición horizontal, al menos, un hilo conductor…
DISPOSITIVO DE VALLADO PROTECTOR.
(01/07/2008) 1. Dispositivo de vallado protector, siendo de especial utilidad para su montaje en la protección de recintos y viales que requieran disponer de un cierto nivel de seguridad, así como en zonas fronterizas, con objeto de poder detectar de una forma rápida, segura y fiable cualquier intento de acceso a través del vallado, caracterizada porque el dispositivo comprende:#- una pluralidad de postes anclados al suelo entre los que se monta una malla definida por un entramado rectangular de alambre de acero;#- una pluralidad de pletinas angulares , montadas en la parte superior de la malla por una de sus alas, presentando su otra ala, en posición ortogonal, una pequeña orejeta orificada;#-…
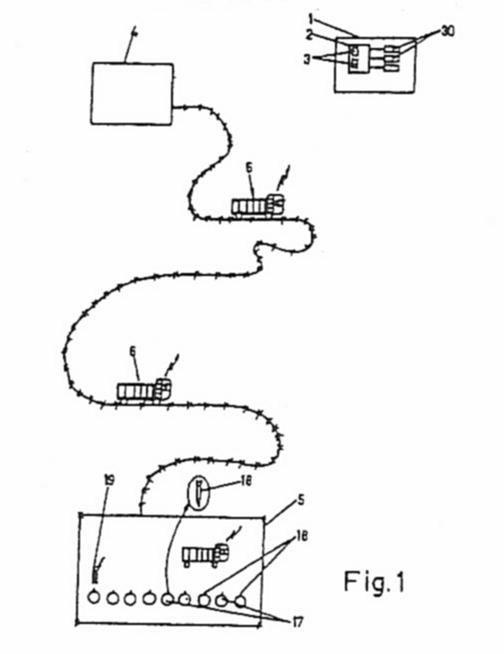
SISTEMA DE IDENTIFICACION, CONTROL, TRANSPORTE Y GESTION DE EXPLOSIVOS.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Física
(01/01/2008). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Clasificación: F42B39/00, G08G1/123M, G06Q10/00D, G08G1/123, G06Q10/00.
Sistema de identificación, control, transporte y gestión de explosivos, para tener un continuo seguimiento del material explosivo desde su salida de fábrica hasta su uso en cantera, que comprende un centro base de control con un ordenador central con unas bases de datos en las que se almacenan los datos identificativos del material explosivo; la dotación en fábrica a todo el material explosivo de una etiqueta inteligente TAG con un número codificado irrepetible: la dotación a los vehículos de transporte del material explosivo de un sistema de posicionamiento GPS, un sistema de comunicación "on line" con el ordenador central y un contenedor blindado para el alojamiento del material explosivo con un sistema integrado de lectura de las etiquetas inteligentes TAG integradas en el material explosivo y una serie de lectores a distancia de unas etiquetas inteligentes TAG asociadas a unas perforaciones en cantera y al material explosivo que alojan lasmismas.
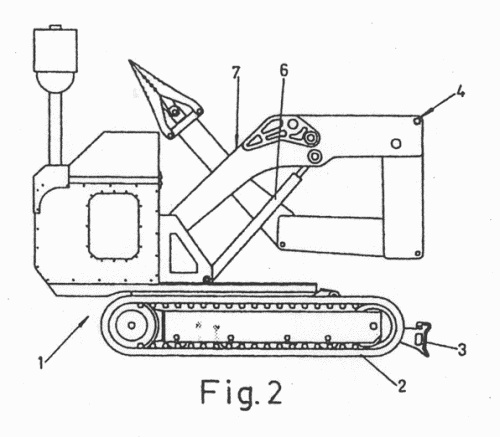
ROBOT AUTOPROPULSADO PARA MANIPULACION DE CARGAS EXPLOSIVAS.
Secciones de la CIP Técnicas industriales diversas y transportes Construcciones fijas
(16/02/2007). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Clasificación: B25J5/00, B62D55/10, E02F9/02, E02F3/815.
Robot autopropulsado para manipulación de cargas explosivas, siendo del tipo de robots autopropulsados manejados a distancia por medio de una consola de mandos, de utilidad para la manipulación de cargas y artefactos explosivos, así como para la realización de operaciones especiales y peligrosas, de forma que el robot autopropulsado comprende unos medios de desplazamiento definidos por sendos trenes laterales de rodadura de oruga , cuyos laterales de rodadura son graduables, y presentan en su parte anterior una pala de arrastre, de longitud graduable, así como un brazo articulado con el primer tramo del brazo en forma de horquilla accionado por una pareja de cilindros y quedando rematado en una pinza.
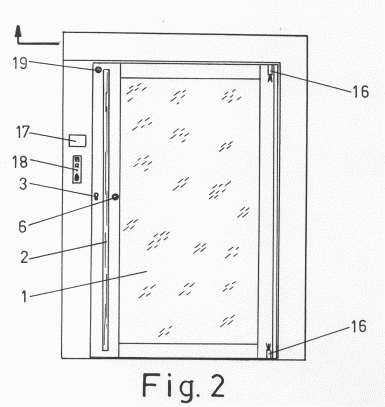
SISTEMA PARA CONTROL DE ACCESO DE PERSONAS.
Secciones de la CIP Física Construcciones fijas
(16/02/2007). Ver ilustración. Solicitante/s: PROYECTOS Y TECNOLOGIA SALLEN, S.L.. Clasificación: G07C9/00, E05G5/00.
Sistema para control de acceso de personas, siendo de especial aplicación para su instalación en el acceso a entidades bancarias, de forma que el sistema comprende una puerta motorizada abatible respecto de una pareja de pivotes y laterales a su lado superior e inferior, estando dotada la puerta de una barra vertical en cada una de sus caras, así como de una cerradura electromecánica, medios detectores de presencia en ambas caras de la puerta , medios de función de la puerta motorizada, medios anti-atrapamiento, y medios de control electrónico del sistema, definidos por una consola de mandos.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}