Procedimiento de estimación de un parámetro de un máximo o mínimo local de una función de correlación derivada de una señal recibida.
(17/05/2012) Un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida, realizado en un sistema de GPS usando muestras de la función, incluyendo las muestras un máximo o mínimo local muestreado, comprendiendo el procedimiento:
realizar la interpolación sobre las muestras de la función en, o cerca de, un máximo o mínimo 5 local, dando como resultado un máximo o mínimo local interpolado;
derivar un desplazamiento de interpolación que comprende una desviación entre ubicaciones del máximo o mínimo local interpolado y el máximo o mínimo local muestreado; y
derivar una estimación del parámetro a partir…
SISTEMA DE MARCA DE AGUA DE FRECUENCIAS DE UN REPETIDOR DE ENLACE DIRECTO.
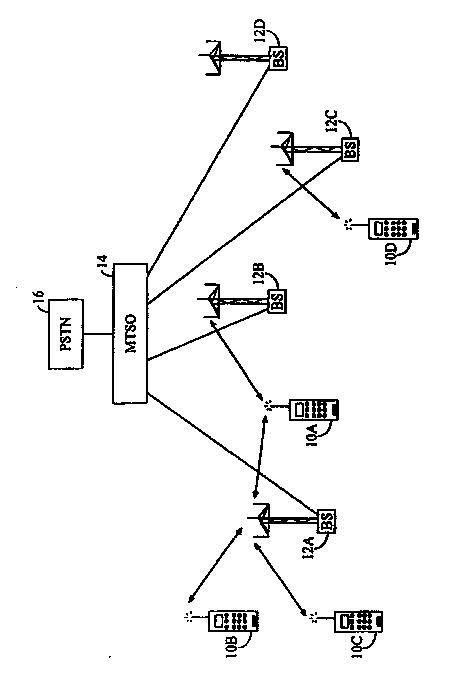
(21/02/2011) Un repetidor para amplificar una señal de enlace directo desde una estación base a una estación móvil , en el que la estación móvil tiene un bucle de seguimiento de la frecuencia, comprendiendo el repetidor: un amplificador para amplificar la señal de enlace directo desde la estación base a la estación móvil; y caracterizado por un modulador de frecuencia rápida que modula la frecuencia de la señal de enlace directo con una marca de agua de frecuencia rápida identificativa según pasa por el repetidor, en el que dicha marca de agua tiene una frecuencia tal que el bucle de seguimiento de la frecuencia sustancialmente no detecta dicha marca de agua en dicha estación móvil
EFICIENCIA MEJORADA DE MENSAJERÍA DE DATOS PARA UN SISTEMA DE DETERMINACIÓN ASISTIDA DE POSICIÓN INALÁMBRICA.
(21/01/2011) Un procedimiento para la información de mensajería basado en el posicionamiento en un sistema de determinación asistida de posición inalámbrica, comprendiendo el procedimiento: la obtención de información de estimación de hora aproximada, de información de estimación de posición aproximada y de información de calendario del GPS, Sistema de Posicionamiento Global; la comprobación de un estado de una primera efeméride para un satélite de posicionamiento; la determinación de si dicho estado de dicha primera efeméride es menor que un primer umbral temporal; la determinación de si dicho satélite de posicionamiento está por encima de un horizonte visible de un dispositivo inalámbrico si dicho estado no es menor que dicho primer umbral temporal; la configuración de una máscara para solicitar una segunda efeméride para dicho satélite…
SISTEMA Y PROCEDIMIENTO PARA INTEGRACION DE UNA RED INFORMATICA INALAMBRICA EN TECNOLOGIA DE DETERMINACION DE POSICION.
(18/10/2010) Un dispositivo de comunicación móvil para suministrar información de posición a una aplicación, que comprende:
primeros medios para recibir una solicitud de información de posición desde la aplicación ;
segundos medios para transmitir una solicitud de asistencia de determinación de posición a una entidad de determinación de posición externa denominada como PDE ;
segundos medios para recibir la información de posición y un valor de error desde la PDE ;
en el que los segundos medios de transmisión y los segundos medios de recepción están adaptados además para comunicarse con la PDE según la norma de comunicación IS 801.11 o sucesivas ;
primeros medios para transmitir la solicitud de información de posición a un punto de acceso si el…
EFICIENCIA MEJORADA DE MENSAJERIA DE DATOS PARA UN SISTEMA DE DETERMINACION ASISTIDA DE POSICION INALAMBRICA.
(16/12/2009) Un procedimiento de mensajería de información basada en la posición en un sistema de determinación asistida de posición inalámbrica, que comprende:
recibir en un dispositivo inalámbrico de posición a determinar, una primera información de asistencia desde una entidad de determinación de posición - abreviada en lo sucesivo como EDP - , mediante un enlace de comunicación inalámbrica, comprendiendo la información de asistencia información referida a una primera pluralidad de satélites ;
caracterizado por:
determinar un conjunto específico de satélites para los cuales se requiere información de asistencia, sobre la base de dicha primera información de asistencia…
BUSCADOR PROGRAMABLE DE FILTRO ADAPTADO PARA LA BUSQUEDA DE MULTIPLES SEÑALES PILOTO.
Secciones de la CIP Electricidad Física
(16/12/2007). Ver ilustración. Solicitante/s: QUALCOMM INCORPORATED. Clasificación: H04B7/26, H04B1/707, H04J13/04, G06F17/15.
Un buscador programable de filtro adaptado que comprende: un registro de desplazamiento (401A-K, 403A-K, 800A-K) que funciona como un registro de desplazamiento único cuando recibe un primer tipo de datos y que funciona como registros de desplazamiento múltiples cuando recibe un segundo tipo de datos, siendo el primer tipo de datos recibido a partir de una fuente única y siendo recibido el segundo tipo de datos a partir de una pluralidad de fuentes; una pluralidad de generadores PN para generar una pluralidad de secuencias PN; un filtro adaptado cargable para cargar dicha pluralidad de secuencias PN, des-escalonar dichos conjuntos de datos entrantes y sumar los resultados intermedios; y un acumulador para recibir dichas sumas y acumularlas en conjuntos para producir un conjunto de sumas acumuladas.
{kind=link}