Sistema de giro para sistema de transporte por cinta.
(06/03/2019) Un sistema de giro para un sistema de transporte por cinta, siendo la cinta de la variedad formada por una pluralidad de pallets , comprendiendo el sistema de transporte una entrada de giro y una salida de giro, dispuestas en el mismo plano horizontal, comprendiendo también el sistema de giro un tramo curvado , que conecta dicha entrada de giro y dicha salida de giro, y estando dispuesto dicho tramo curvado en el mismo plano horizontal que la entrada de giro y la salida de giro caracterizado porque
- el tramo curvado del sistema de giro comprende:
- una guía externa correspondiente a la guía externa de la entrada de giro y de la entrada de giro,
- una guía interna correspondiente a la guía interna de la entrada de giro y de la salida de giro,
estando dispuestos los pallets de la cinta entre las…
Sistema de accionamiento para pasamanos de vías peatonales y de escaleras mecánicas.
(03/08/2016) Sistema de accionamiento para pasamanos de vías peatonales y escaleras mecánicas que comprende una pluralidad de carros , los cuales, a su vez, comprenden:
- un cuerpo ;
- una pluralidad de rodillos conductores configurados para rodar a lo largo de una guía que define una trayectoria de pasamanos ;
en el que comprende:
- unos medios de bloqueo / liberación del carro con una cadena de accionamiento del pasamanos, que comprenden:
- una rueda configurada para rodar a lo largo de un perfil de leva para desplazar los medios de bloqueo entre:
- una posición operativa, en la que el carro está fijado a la cadena ;
- una posición inoperativa, en la que el carro está liberado de la cadena ;
- un gancho conectado a la rueda configurado para desplazarse…
Sistema de frenado para escaleras mecánicas y pasillos móviles.
(06/07/2016) Un sistema de frenado para escaleras mecánicas y pasillos móviles, que comprende:
- al menos un dispositivo de frenado , cada uno con un freno principal del tipo que se libera cuando no hay tensión eléctrica en sus medios eléctricos de activación, y un freno auxiliar del tipo que se cierra cuando no hay tensión eléctrica en sus medios eléctricos de activación; y
- medios de control para controlar el al menos un dispositivo de frenado configurado para activar el al menos un freno auxiliar para llevar la escalera mecánica o pasillo móvil a una posición segura cuando hay un fallo en el sistema;
obtener la carga de la escalera mecánica o pasillo móvil;
caracterizado porque los medios de control …
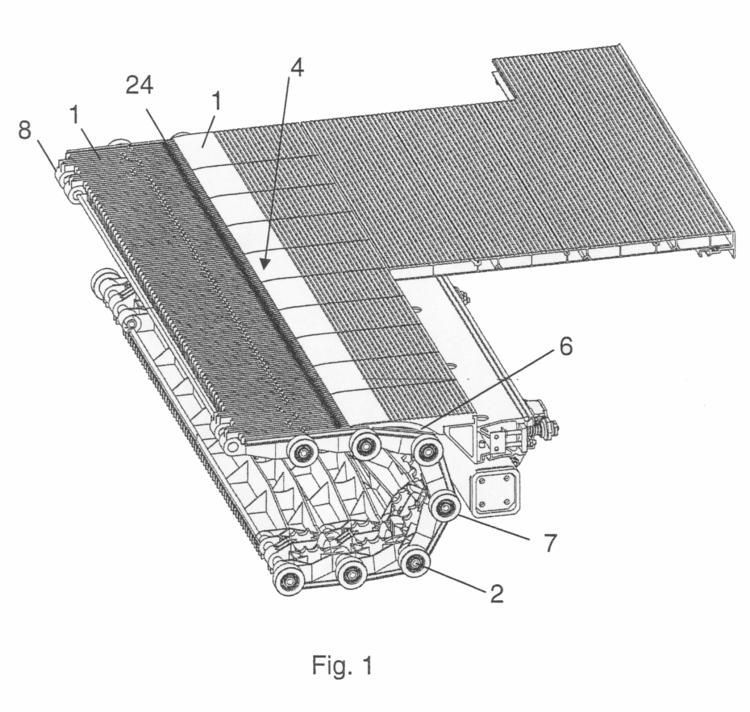
Peldaño de escalera mecánica.
(16/03/2016) Un peldaño escalera mecánica que comprende:
una primera superficie en un área de marcha donde la primera superficie comprende un primer material que tiene un primer coeficiente de fricción controlado para aumentar la estabilidad de los pasajeros, teniendo dicho primer coeficiente de fricción controlado un valor comprendido entre 0,3 y 0,8;
una estructura de soporte que tiene:
una superficie de soporte configurada para soportar la primera superficie ;
una superficie de conexión configurada para alojar el primer medio de conexión configurado para conectarse a los medios de accionamiento;
rodillos de accionamiento configurados para rodar sobre una primera pista que define una trayectoria que ha de ser seguida por el peldaño;
rodillos (31') de soporte configurados para rodar sobre una segunda…
(21/12/2015) Una acera mecánica formada por medio de una serie de tramos , con un contorno rectangular que tiene una superficie de paso y conectada con medios de accionamiento, conectados consecutivamente entre sí a largo de secciones extremas de sus bordes paralelos adyacentes, mediante medios de conexión que definen articulaciones con un pasador perpendicular a la dirección de movimiento de los tramos y colocado únicamente en los extremos de los tramos , y que tienen entre dichas secciones medios que definen, en la trayectoria de movimiento de avance de la acera, soportes mutuos entre tramos consecutivos coplanarios, caracterizada porque los…
Pasillo mecánico que comprende un sistema de guiado auto-soportado.
(02/12/2015) Un sistema de pasillo mecánico por medio de plataformas provistas con rodillos que comprende medios de guiado auto-soportados para el guiado del movimiento de las plataformas , que comprende:
un primer elemento longitudinal y un segundo elemento longitudinal dispuesto simétrico respecto al primer elemento longitudinal en relación a un plano medio longitudinal del sistema transportador para definir una pista de movimiento de avance y una pista de retorno de los rodillos ;
al menos una traviesa de conexión para la conexión de los elementos longitudinales;
en el que los elementos longitudinales comprenden:
una superficie superior que comprende la pista de movimiento de avance sobre la que ruedan los rodillos ;
una superficie inferior…
SISTEMA DE TRANSPORTE DE VELOCIDAD VARIABLE.
Sección de la CIP Técnicas industriales diversas y transportes
(02/04/2015). Ver ilustración. Solicitante/s: THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A. Clasificación: B66B23/02, B66B21/12.
Un sistema de tracción para un sistema de transporte que tiene: dispositivos de accionamiento para transmitir un movimiento de accionamiento desde al menos un motor ; primeros dispositivos de arrastre configurados para transmitir un movimiento de arrastre desde dispositivos de accionamiento hasta el sistema de transporte en un tramo de velocidad de transición situado entre una zona de embarque/desembarque y una zona media; segundos dispositivos de arrastre configurados para transmitir un movimiento de arrastre desde los primeros dispositivos de arrastre hasta el sistema de transporte en un tramo de alta velocidad situado en una zona de media del sistema de transporte.
SISTEMA DE ACCIONAMIENTO DE ESCALERAS Y PASILLOS MÓVILES.
(30/07/2014) Sistema de accionamiento de escaleras y pasillos móviles, que comprende el accionamiento del pasamanos de la escalera o pasillo, a través de dos ruedas de tracción que están dotadas de un acabado periférico y de medios de engrane con otros tantos piñones relacionados con el motor de accionamiento, y el accionamiento de la banda de paletas o peldaños se lleva a cabo mediante una sola rueda de tracción que dispone de medios de engrane con un piñón relacionado con el motor de accionamiento y de medios de actuación sobre la banda de paletas o peldaños .
Sistema de tracción para un sistema de transporte.
(04/04/2014) Un sistema de tracción para un sistema de transporte que tiene: dispositivos de accionamiento para transmitir un movimiento de accionamiento desde al menos un motor ; primeros dispositivos de arrastre configurados para transmitir un movimiento de arrastre desde dispositivos de accionamiento hasta el sistema de transporte en un tramo de velocidad de transición situado entre una zona de embarque/desembarque y una zona media; segundos dispositivos de arrastre configurados para transmitir un movimiento de arrastre desde los primeros dispositivos de arrastre hasta el sistema de transporte en un tramo de alta velocidad situado en una zona de media del sistema de transporte.
Sistema para arrastre de pasamanos de pasillos y escaleras móviles.
(02/04/2014) Sistema para arrastre de pasamanos de pasillos y escaleras móviles, formado por una pluralidad de carros , los cuales tienen un cuerpo con varios rodillos conductores (7, 7') para rodar sobre una guía que define un recorrido del pasamanos , dispositivos de enclavamiento/desenclavamiento del carro con una cadena de arrastre del pasamanos, y un gancho conectado con los dispositivos de enclavamiento/desenclavamiento para ser desplazado entre: una posición de enganche, donde el carro está enclavado a la cadena y una posición de desenganche, donde el carro está desenclavado de dicha cadena.
Sistema de transporte para desplazamiento de pasajeros/mercancías.
(13/11/2013) Sistema de transporte para desplazamiento de pasajeros/mercancías que comprende:
una pluralidad de eslabones de tracción conectados entre sí mediante ejes-pasadores perpendiculares a un sentido longitudinal de desplazamiento D para formar una cadena de eslabones detracción ;
medios de accionamiento para transmitir un movimiento de accionamiento desde al menos un motor ;
medios de arrastre configurados para transmitir un movimiento de arrastre desdelos medios de accionamiento hasta la cadena de eslabones de tracción ;
los eslabones de tracción comprenden:
una superficie funcional que tiene primeros medios de engranaje ; y
los medios de…
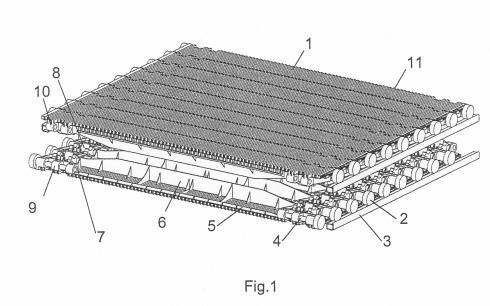
PELDAÑO PARA ESCALERAS MECÁNICAS Y PROCEDIMIENTO DE FABRICACIÓN.
(09/07/2013) Peldaño para escaleras mecánicas y procedimiento de fabricación. El peldaño tiene: una primera superficie en una zona pisable que tiene un material que tiene un coeficiente de fricción entre 0'3 y 0'8, para incrementar una estabilidad de los pasajeros; una estructura portante de la primera superficie para: soportar la primera superficie ; albergar primeros dispositivos de conexión a sistemas de arrastre . El peldaño permite una mayor facilidad para desmontar los componentes, una disminución de ruido de funcionamiento, una mejora en la resistencia del peldaño y un zócalo más rígido frente a cargas laterales. En el procedimiento, la primera superficie es obtenida mediante un procedimiento como: moldear un material compuesto que tiene una resina; inyectar a una baja presión una resina; termoconformar mediante vacío una lámina de una resina.
SISTEMA DE ACCIONAMIENTO PARA ESCALERAS Y PASILLOS MÓVILES, MEJORADO.
(27/06/2013) Mejoras introducidas en la patente de invención nº 200931290 relativa a un sistema de accionamiento para escaleras y pasillos móviles constituidos por una banda de peldaños o paletas , que comprende una pluralidad de árboles consecutivos accionados por un mecanismo de transmisión y una primera rueda portadora de un primer juego de rodillos que engranan con la banda a través de unas primeras conformaciones . Los árboles comprenden una segunda rueda (3'), paralela a la primera rueda , portadora de un segundo juego de rodillos (4') de giro libre desfasados angularmente respecto al primer juego de rodillos , que engranan con la banda a través de unas segundas…
Rampa para transporte de personas y/o mercancias.
(18/04/2013) Rampa para transporte de personas y/o mercancías, que comprende una banda móvil , compuesta por una infinidad de paletas que se deslizan entre guías laterales; unas placas fijas superior e inferior para embarque y desembarque; y balaustradas con pasamanos que limitan lateralmente la banda móvil , caracterizada porque las placas fijas inferiores y las paletas de la bande móvil no son paralelas, estando dispuestas las placas fijas inferiores en posición sensiblemente horizontal, mientras que las paletas de la banda móvil se desplazan en posición inclinada, a partir de dichas placas fijas, con la inclinación de la banda móvil…
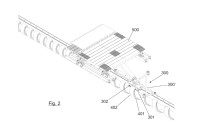
Sistema de volteo para sistema de transporte por banda.
(17/04/2013) Sistema de volteo para sistema de transporte por banda, en el que la banda está formada por una pluralidad de paletas , y el sistema de transporte tiene un tramo entrada al volteo y un tramo de salida del volteo dispuestos en el mismo plano horizontal. El sistema de volteo presenta un tramo curvo que conecta la entrada y la salida del volteo , estando dispuesto el tramo curvo en el mismo plano horizontal que la entrada y la salida del volteo .
Pasillo móvil de acceso lateral.
(11/04/2013) Pasillo móvil de acceso lateral, que comprende una pluralidad de paletas consecutivas que conforman un circuito cerrado que presenta caminos de ida y de vuelta transitables; y medios de accionamiento que permiten un movimiento de avance (F) de las paletas a lo largo de dicho circuito y un volteo horizontal (T) de las mismas en zonas extremas de embarque y desembarque . Cada paleta comprende un tramo horizontal transitable y un tramo vertical que se encuentran unidos; donde las paletas se encuentran ensambladas y articuladas verticalmente de forma consecutiva para conformar una balaustrada central que discurre a lo largo del circuito cerrado , por el contorno interior del mismo, permitiendo el acceso a los tramos horizontales desde zonas laterales de embarque y desembarque contiguas al contorno exterior de…
SISTEMA DE ACIONAMIENTO DE PASILLOS MOVILES.
(24/07/2012) Sistema de accionamiento de pasillos móviles, que comprende una unidad motriz (2-2') dispuesta en cada extremo del pasillo , medios de control (3-3') para cada unidad motriz y medios de control general del conjunto de unidades motrices (3-3').
Sistema de accionamiento de pasillos y escaleras móviles.
(06/06/2012) Sistema de accionamiento de pasillos y escaleras móviles mediante cadenas de arrastre horizontales , quecomprende un mecanismo motriz de accionamiento y cadenas de arrastre encargadas de provocar eldesplazamiento de las placas del pasillo móvil o peldaños de la escalera, donde las cadenas de arrastre y laspaletas o peldaños disponen de medios de engrane mutuo directo, que quedan enfrentados y se acoplan entre sí a lo largo de al menos un tramo recto del trayecto de la cinta o escalera, caracterizado por que dichos medios deengrane consisten en rodillos deformables (5-5'-5'') que van montados en los eslabones de la cadena dearrastre y engranan en cavidades complementarias que presentan las placas o escalones en el reverso;discurriendo los rodillos (5-5'-5'') de la cadena de arrastre en posición enfrentada a las cavidades de laspaletas o…
Junta longitudinal transversal.
(01/06/2012) Junta longitudinal transversal que comprende una pluralidad de lamas que tienen un eje principal (11e), una superficie practicable (11s), una superficie funcional (11f) opuesta a la superficie practicable (11s), caras de conexión entre la superficie practicable (11s) y la superficie funcional (11f), donde las lamas están:
engarzadas una a continuación de otra según el eje principal (11e) para formar una estructura de fuelle, donde las lamas tienen un movimiento de desplazamiento sin solución de continuidad con 2 grados de libertad, para modificar la forma del fuelle entre una posición desplegada, donde la junta tiene una anchura/longitud máxima, y una posición replegada, donde la junta tiene una anchura/longitud mínima:
un primer grado de…
SISTEMA DE FRENADO PARA ESCALERAS MECÁNICAS Y PASILLOS MÓVILES.
(16/04/2012) Sistema de frenado para escaleras mecánicas y pasillos móviles, que comprende:
- dispositivo de frenado con freno principal , de tipo liberado en ausencia de tensión en sus medios eléctricos de activación, y freno auxiliar , de tipo cerrado en ausencia de tensión en sus medios eléctricos de activación;
- medios de control del dispositivo de frenado , preparado para:
- ante la recepción de una orden de frenado, obtener la carga de la escalera mecánica o pasillo móvil, calcular en función de dicha carga el par de frenado requerido cada dispositivo de frenado y activar el dispositivo de frenado para obtener el correspondiente par durante el frenado;
- ante…
(09/03/2012) Pasillo móvil constituido por una pluralidad de paletas que forman una banda continua, con una superficie ranurada habilitada para los usuarios y que voltean por medio de curvas de manera que en el volteo se incluyen 3 o más eslabones de la cadena de tracción, donde dicho pasillo tiene peines , los cuales copian la trayectoria de los extremos de ranura de la paleta tanto en el valle como en la cresta dejando el hueco suficiente para evitar la interferencia ,donde las paletas están unidas entre si y articulan respecto a un eje que atraviesa cada dos paletas consecutivas constituyendo la cadena de tracción,…
SISTEMA DE CURVA DE VOLTEO PARA SISTEMA DE TRANSPORTE POR CADENA.
(17/01/2012) Sistema de curva de volteo para sistema de transporte por cadena, que comprende una cadena que tiene tracción lineal que está conducida en tramos de volteo mediante guías de volteo, teniendo dichas guías de volteo una geometría obtenida mediante una familia de curvas que corresponden con trayectorias definidas por seis puntos , correspondiendo dichos seis puntos con seis posiciones de articulaciones de eslabones consecutivos de la cadena en los tramos de volteo, tales que: la primera trayectoria entre el primer punto y el segundo punto y la quinta trayectoria entre el quinto punto y el sexto punto definen una velocidad lineal, constante…
SISTEMA DE ACCIONAMIENTO PARA ESCALERAS Y PASILLOS MOVILES.
(20/05/2011) Sistema de accionamiento para escaleras y pasillos móviles, que comprende un conjunto de ruedas portadoras de rodillos de giro libre, de ejes paralelos al de las ruedas, y uno o más árboles perpendiculares a la dirección de desplazamiento de la banda de peldaños o paletas , en los que van montadas dichas ruedas de rodillos. Los árboles y ruedas quedan dispuestos entre los tramos de ida y retorno de la banda de peldaños o paletas . Las ruedas engranan a través de los rodillos con los peldaños o paletas a través de conformaciones de engrane de la banda de escalones o peldaños . Los árboles van relacionados con un conjunto motriz a través de un mecanismo de transmisión
SISTEMA ROTATIVO DE ACCIONAMIENTO LINEAL DE PASAMANOS PARA ESCALERAS MECANICAS Y PASILLOS RODANTES.
(13/04/2011) Sistema rotativo de accionamiento lineal de pasamanos para escaleras mecánicas y pasillos rodantes, que comprende un pasamanos , con primeros medios de fricción en una cara, constituidos por rodillos de presión , medios de arrastre, constituidos por segundos medios de fricción, consistentes en rodillos de tracción , configurados para acoplarse a los primeros y arrastrar dicha banda en la dirección de desplazamiento (D), y sistema de presión, comprendiendo una primera capa de soporte cinemática, formado por manivela , eje articulado , biela conductora , ejes y manivelas conducidas , y una segunda capa de medios de fricción formada…
RAMPA PARA TRANSPORTE DE PERSONAS Y/O MERCANCIAS.
(27/12/2010) Rampa para transporte de personas y/o mercancías, que comprende una banda móvil limitada entre placas fijas superior e inferior de embarque y desembarque. La banda móvil está compuesta por infinidad de paletas (4-4'') inclinadas, que no son paralelas a las placas fijas inferiores sensiblemente horizontales, teniendo dichas paletas la inclinación de la banda móvil
SISTEMA DE TRANSPORTE PARA DESPLAZAMIENTO DE PASAJEROS/MERCANCIAS.
(06/04/2010) Sistema de transporte para desplazamiento de pasajeros/mercancías.
Sistema de accionamiento de paletas que mueve las paletas de un pasillo móvil a través de cadenas de arrastre que se engranan directamente a la parte inferior de las cadenas de eslabones de tracción. La cadena de arrastre tiene rodillos de arrastre separados que están hechos de materiales deformables y elásticos. Los eslabones de las cadenas de tracción están conectados entre sí por ejes de unión y poseen dientes y garras en la parte inferior para engranar con la cadena de arrastre y los rodillos
JUNTA LONGITUDINAL TRANSVERSAL.
(16/03/2010) Junta longitudinal transversal que tiene lamas que tienen un eje principal (11e), una superficie practicable (11s), una superficie funcional (11f) opuesta a la superficie practicable (11s), caras de conexión entre la superficie practicable (11s) y la superficie funcional (11f). Las lamas están engarzadas una a continuación de otra según el eje principal (11e) para formar una estructura de fuelle, con un movimiento de desplazamiento sin solución de continuidad con 2 grados de libertad, para modificar la forma del fuelle entre una posición desplegada y una posición replegada. Las lamas conforman una superficie retráctil . Cada lama intermedia tiene elementos…
Sección de la CIP Técnicas industriales diversas y transportes
(24/08/2009). Ver ilustración. Solicitante/s: THYSSENKRUPP ELEVATOR (ES/PBB) LTD.
THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A. Clasificación: B66B29/06.
Pasillo móvil que transporta a las personas sobre una superficie ranurada incluida en unas paletas que tienen el mismo paso que la cadena de tracción pudiendo estar todas ellas unidas por medio de ejes conformando entre ellas la propia cadena de tracción, donde las paletas se voltean por medio de una guía en la cual solamente se encuentran tres paletas produciendo un volteo rápido que permite que el peine tenga la suficiente inercia en sus nervios como para soportar las cargas que los usuarios le aplicarán en la dirección.
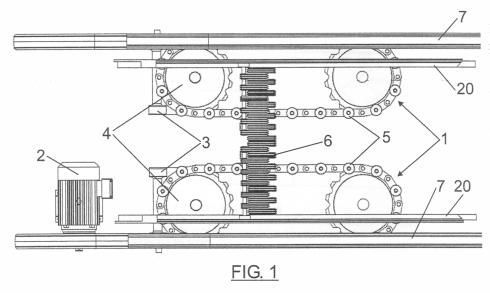
SISTEMA DE ACCIONAMIENTO DE PASILLOS Y ESCALERAS MOVILES.
Sección de la CIP Técnicas industriales diversas y transportes
(24/08/2009). Ver ilustración. Solicitante/s: THUSSENKRUPP ELEVATOR INNOVATION CENTER, S.A.
THYSSENKRUPP ELEVATOR (ES/PBB) LTD. Clasificación: B66B23/02, B65G23/16.
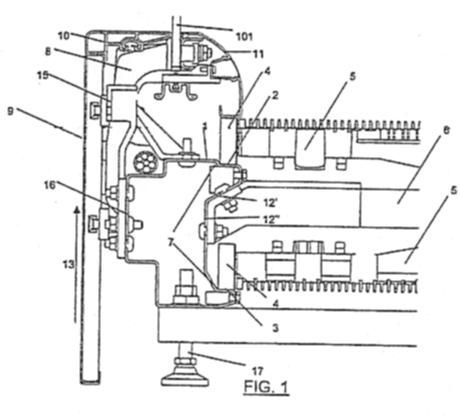
Sistema de accionamiento de pasillos y escaleras móviles mediante cadenas de arrastre horizontales, que tiene un mecanismo motriz de accionamiento y cadenas de arrastre encargadas de provocar el desplazamiento de las placas del pasillo o peldaños de la escalera. Las cadenas de arrastre y las paletas o peldaños disponen de dispositivos de engrane mutuo directo, que quedan enfrentados y se acoplan entre sí a lo largo de un tramo recto del trayecto de la cinta o escalera. Los dispositivos tienen rodillos deformables que van montados en los eslabones de la cadena de arrastre y engranan en cavidades complementarias que presentan las placas o escalones en el reverso. (Ver figura).
Sección de la CIP Técnicas industriales diversas y transportes
(12/06/2009). Ver ilustración. Solicitante/s: THYSSENKRUPP ELEVATOR (ES/PBB) LTD.
THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A. Clasificación: B65G17/08, B66B23/12, B66B21/10.
Pasillo móvil, constituido por una sucesión de paletas de contorno rectangular que presentan una superficie transitable y van relacionadas con medios de arrastre. Las paletas van consecutivamente relacionadas entre sí a lo largo de tramos extremos de sus cantos paralelos adyacentes, mediante dispositivos de conexión que definen articulaciones de eje perpendicular a la dirección de desplazamiento de las paletas, y disponen entre dichos tramos de medios que definen, en el trayecto de avance del pasillo, apoyos mutuos entre paletas consecutivas coplanarias.
SISTEMA DE GUIADO AUTOPORTANTE PARA PASILLOS RODANTES.
Sección de la CIP Técnicas industriales diversas y transportes
(12/06/2009). Ver ilustración. Solicitante/s: THYSSENKRUPP ELEVATOR (ES/PBB) LTD.
THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A. Clasificación: B66B23/22, B66B23/14.
Sistema de guiado autoportante para pasillos rodantes.#El sistema tiene: un primer larguero y un segundo larguero colocado simétrico del primer larguero respecto de un plano medio longitudinal del sistema de transporte, para definir un camino de rodadura de avance y un camino de rodadura de retorno de los rodillos ; un travesaño de unión para unir los largueros. Los largueros tienen: una superficie superior que define el camino de rodadura de avance sobre el que ruedan los rodillos ; una superficie inferior que define el camino de rodadura de retorno sobre el que ruedan los rodillos ; una superficie interior provista de medios de fijación de los largueros; una superficie exterior. El primer larguero está unido con el segundo larguero por medio de un travesaño de unión para garantizar una tolerancia necesaria entre los largueros.
ACSTEMA DE CURVA DE VOLTEO PARA SISTEMA DE TRANSPORTE POR CADENA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/04/2009). Ver ilustración. Solicitante/s: THYSSENKRUPP ELEVATOR INNOVATION CENTER, S.A.
THYSSENKRUPP ELEVATOR (ES/PBBL) LTD. Clasificación: B66B23/02B, B66B23/02.
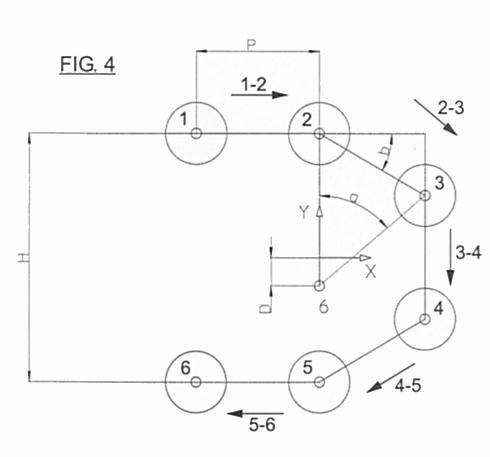
Sistema de curva de volteo para sistema de transporte por cadena que tiene una cadena que tiene tracción lineal que está conducida en tramos de volteo mediante guías de volteo. Las guías de volteo tienen una geometría obtenida mediante una familia de curvas que corresponden con trayectorias definidas por seis puntos , correspondiendo los seis puntos con seis posiciones de articulaciones de eslabones consecutivos de la cadena en los tramos de volteo. El sistema permite que los tramos de volteo sean más compactos y alarga la vida de los rodillos de la cadena, pues las cargas a las que los rodillos son sometidos son menores.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}