13 inventos, patentes y modelos de MARIN LOPEZ,JOSE MARIA
MECANISMO DE VARIACIÓN DE LA GEOMETRIA DE UN VEHÍCULO DE AL MENOS DOS RUEDAS.
Sección de la CIP Técnicas industriales diversas y transportes
(30/07/2020). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Clasificación: B62K19/00, B62K19/18.
Mecanismo de variación de la geometría de un vehículo de dos ruedas. El mecanismo varía la distancia entre ejes (D) del vehículo y el ángulo de lanzamiento (L) del vehículo. Comprende un primer y segundo cuerpos vinculados mediante un primer elemento de fijación y un segundo elemento de fijación . Comprende un primer conjunto de ajuste para regular la distancia entre ejes (D) mediante un primer tornillo sinfín vinculado a un primer elemento rotatorio vinculado a su vez a un elemento de desplazamiento longitudinal que provoca el desplazamiento longitudinal relativo entre los cuerpos . Comprende un segundo conjunto de ajuste para regular el ángulo de lanzamiento (L) con un segundo tornillo sinfín vinculado a un segundo elemento rotatorio vinculado al segundo elemento de fijación excéntricamente tal que el movimiento de éste provoca la rotación respectiva de los cuerpos.
MODULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO.
Secciones de la CIP Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(04/10/2018). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Clasificación: B25J9/08, B62D57/032, A63H11/20.
Modulo robótico que mediante un actuador único puede moverse por entornos tridimensionales. El módulo robótico es de configuración sencilla y ligera con un bastidor en el interior del que se encuentra un primer eje accionado por el actuador . Para poder realizar el desplazamiento tridimensional comprende al menos dos mecanismos de transmisión encargados del movimiento de unos medios de transmisión solidarios a unos ejes que comprenden medios de adhesión en sus extremos. El desplazamiento se realiza fijando uno de los medios de adhesión a la superficie de forma que el bastidor rota sobre el eje que comprende dicho medio de fijación se describe también un robot modular que comprende una pluralidad de módulos robóticos para permitir el desplazamiento por entornos más complejos.
MÓDULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO.
Secciones de la CIP Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(02/10/2018). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Clasificación: B25J9/08, B62D57/032, A63H11/20.
Módulo robótico y robot modular que comprende dicho módulo robótico.
Modulo robótico que mediante un actuador único puede moverse por entornos tridimensionales. El módulo robótico es de configuración sencilla y ligera con un bastidor en el interior del que se encuentra un primer eje accionado por el actuador .Para poder realizar el desplazamiento tridimensional comprende al menos dos mecanismos de transmisión encargados del movimiento de unos medios de transmisión solidarios a unos ejes que comprenden medios de adhesión en sus extremos. El desplazamiento se realiza fijando uno de los medios de adhesión a la superficie de forma que el bastidor rota sobre el eje que comprende dicho medio de fijación. Se describe también un robot modular que comprende una pluralidad de módulos robóticos para permitir el desplazamiento por entornos más complejos.
PDF original: ES-2684377_A1.pdf
PINZA DE RETRACCIÓN AUTOMÁTICA PARA ROBOT Y ROBOT QUE COMPRENDE
LA PINZA DE RETRACCIÓN AUTOMÁTICA.
Sección de la CIP Técnicas industriales diversas y transportes
(10/05/2018). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Clasificación: B66F3/22, B65G47/90, B25J15/02.
Pinza de retracción automática para robot y robot que comprende la pinza de retracción automática, configurada para vincularse a un robot para recoger y soltar un objeto sobre un plano situado inferiormente a la pinza, que comprende al menos dos módulos enfrentados entre sí que desplazan longitudinalmente para aproximarse y alejarse horizontalmente al objeto , en el que cada uno de dichos módulos comprende a su vez un mecanismo articulado , un mecanismo elástico desplegable compuesto por una pluralidad de módulos de tijera solidariamente vinculados entre sí que se pliegan y despliegan accionada por el actuador , para aproximarse y alejarse verticalmente al objeto , y un dedo para contactar con el objeto , vinculado al segundo extremo del mecanismo elástico desplegable. Un actuador vinculado a un control externo del cual recibe señales acciona a los mecanismos articulados y a los mecanismos elásticos.
PDF original: ES-2667440_A1.pdf
SILLA DE RUEDAS ELÉCTRICA.
Sección de la CIP Necesidades corrientes de la vida
(01/09/2016). Solicitante/s: VALLEJO PINEDA, Robert Andrey. Clasificación: A61G5/04, A61G7/10, A61G5/10, A61G5/12, A61G5/08.
La presente invención se refiere a una silla de ruedas eléctrica que incorpora un mecanismo de grúa, el cual permite trasladar una persona discapacitada o dependiente desde la propia silla de ruedas hasta cualquier superficie que se desee, como puede ser una cama, un inodoro, una camilla, etc., y viceversa, es decir desde dicha superficie a la silla de ruedas, y unos reposabrazos que comprenden un dispositivo de anclaje para la fijación de un arnés de sujeción de un paciente. El chasis de la silla de ruedas comprende un mecanismo de grúa, que a su vez comprende un actuador conectado por un extremo al respaldo y por el otro extremo a los reposabrazos para elevar al paciente, que se encuentra sujeto en el arnés , desplazando los reposabrazos mediante el accionamiento del actuador.
SILLA DE RUEDAS ELÉCTRICA.
Sección de la CIP Necesidades corrientes de la vida
(30/08/2016). Solicitante/s: VALLEJO PINEDA, Robert Andrey. Clasificación: A61G7/10, A61G5/10, A61G5/14.
Silla de ruedas eléctrica.
La presente invención se refiere a una silla de ruedas eléctrica que incorpora un mecanismo de grúa, el cual permite realizar la transferencia de la persona discapacitada o dependiente desde la propia silla de ruedas hasta cualquier superficie que se desee, como puede ser una cama, un inodoro, una camilla, etc y viceversa, desde dicha superficie a la silla de ruedas y unos reposabrazos que comprenden un dispositivo de anclaje para la fijación de un arnés de sujeción de un paciente.
PDF original: ES-2580979_A2.pdf
PDF original: ES-2580979_B1.pdf
PDF original: ES-2580979_R1.pdf
DISPOSITIVO DE CONTROL DE UNA INSTALACIÓN DE AGUA CALIENTE SANITARIA.
(18/07/2013) Dispositivo de control de una instalación de agua caliente sanitaria.
Permite realizar un control completo y preciso de una instalación de agua caliente sanitaria (ACS), tanto para configuraciones de una única vivienda como para un sistema multi-vivienda donde varias viviendas son controladas de forma simultánea empleando varios dispositivos de control objeto de invención, destacando además dicho dispositivo de control por ser totalmente programable. Dicho dispositivo de control destaca fundamentalmente por comprender un microcontrolador conectado a unos módulos de entrada y salida , y que comprende a su vez una unidad de control adaptada para regular los caudales de agua que circulan por la instalación ACS en función de la información recogida por…
MÁQUINA PARA DESTRENZAR CABLES.
(22/04/2013) Máquina para destrenzar cables.
Permite extender la longitud de cualquier tipo de cable rápidamente y con seguridad. Comprende: una bancada dotada de una plataforma horizontal y unas patas de apoyo al suelo; unas ranuras en un extremo de la plataforma , y unos taladros en el extremo opuesto; un primer soporte fijado a las ranuras y un segundo soporte fijado a los taladros ; los soportes comprenden: bases para fijarlos a la bancada ; medios de alojamiento dotados de aberturas en la parte superior para alojar el cable; medios de sujeción para sujetar a cada uno de dichos medios de alojamiento …
MECANISMO Y MODULO ARTICULADO.
(14/09/2012) Mecanismo y módulo articulado.
Se describen un mecanismo y un módulo de posicionamiento que permite alcanzar una posición y orientación determinada del plano móvil respecto al extremo de referencia fijo (plano fijo). Este módulo mecánico puede utilizarse en aquellas aplicaciones en las que sea necesario mover o posicionar materiales, herramientas de manufactura, mantenimiento o de control o inspección, etc., mediante el acoplamiento a uno de sus planos de la herramienta adecuada para la relación de la tarea.
MÓDULO DE VELAS ARTIFICIALES MÓVILES.
(13/07/2012) Módulo de velas artificiales móviles.
Es un módulo de velas artificiales móviles, que comprende al menos una vela artificial móvil que se utiliza para iluminar y decorar simulando el comportamiento de una vela real, tanto en el efecto llama de la parte luminosa, como el movimiento descendente que lleva a cabo la llama, con el transcurso del tiempo propio del consumo de la vela de cera.
Para ello, el módulo de velas artificiales móviles comprende un soporte , sobre el que se ubica las velas artificiales las cuales tienen un cuerpo móvil , capaz de ascender y descender por dentro de dicho soporte , y en cuya parte superior se aloja un elemento emisor de luz . El movimiento del cuerpo móvil se realiza con la intermediación de unos medios de desplazamiento controlables de forma…
CICLOMOTOR ELECTRICO PLEGABLE Y PROCEDIMIENTO DE PLEGADO.
(18/05/2012) Ciclomotor eléctrico plegable y procedimiento de plegado.
Del tipo que comprende dos ruedas, una delantera y otra trasera, unos discos de freno situados en sendas ruedas, un chasis central en cuyo interior se encuentra al menos una batería de alimentación de un motor alojado en la rueda trasera, un sillín sobre el cual va sentado un usuario, un manillar mediante el cual se controla la dirección, y unas estriberas destinados a recibir los pies del usuario, comprendiendo adicionalmente: un basculante delantero que vincula el chasis con la rueda delantera, y un basculante trasero que vincula el chasis con la rueda trasera del ciclomotor, mediante los cuales dichas ruedas quedan ubicadas parcialmente en el interior de una carcasa .
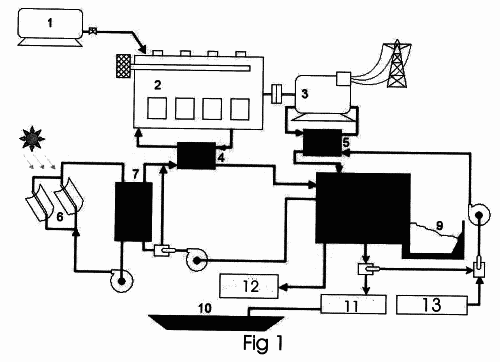
PLANTA COMBINADA DE PRODUCCION DE ELECTRICIDAD, AGUA DESALADA, SALMUERA Y SAL.
Sección de la CIP Química y metalurgia
(01/03/2005). Ver ilustración. Solicitante/s: RIO-HORTEGA PEA,JOSE MARIA VELASCO SANCHEZ,EMILIO MARIN LOPEZ,JOSE MARIA. Clasificación: C02F1/14, C02F1/16.
Planta Combinada de Producción de Electricidad, Agua Desalada, Salmuera y Sal a partir de hidrocarburos y agua salada procedente de cualquier fuente de agua salina, preferentemente del mar en la cual la electricidad se produce mediante un generador acoplado a una máquina de combustión interna , que consume los hidrocarburos . El agua desalada se produce por evaporación de agua salina, mediante un sistema que aprovecha el calor residual que se genera en la combustión . La salmuera, con diferente grado de concentración en función de la aplicación a que se destine, se obtiene del proceso de evaporación de agua salina.
PLATAFORMA PARA EL TRATAMIENTO Y MANIPULACION DE ARBOLES, ESPECIALMENTE PALMERAS.
(16/04/2002) 1. Plataforma para el tratamiento y manipulación de árboles, especialmente palmeras, siendo también de aplicación a cualquier tipo de árbol, báculo o poste, de altura superior a un limite predeterminado, que pueda ser abrazado por la plataforma, mediante la que se proporciona un medio operativo seguro para el operario que está llevando a cabo las distintas operaciones de tratamiento y manipulación sin necesidad de cargar el tronco del árbol, evitando con ello la posibilidad de rotura accidental de este último, que se caracteriza porque en su conjunto adopta en planta forma curva, a modo de herradura, y está compuesta por una pasarela a la que se vincula un medio de anclaje a brazo articulado autopropulsado, para la elevación y posicionamiento adecuados de la plataforma, estando dicha plataforma…
{kind=link}