14 inventos, patentes y modelos de LEITNER, FRANCOIS
SISTEMA DE NAVEGACION QUIRURGICO PARA REALIZAR UNA CAVIDAD DE RECEPCION PARA UN ACETABULO.
(05/10/2010) Sistema de navegación quirúrgico para una herramienta navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico navegado, con un instrumento palpador navegado y con un dispositivo de procesamiento de datos para procesar los datos de posición de las piezas navegadas, caracterizado porque el dispositivo de procesamiento de datos está programado de tal forma que a partir de los datos de posición de un punto de gota de lágrima (figura de lágrima según Köhler) en el hueso pélvico , determinados con la ayuda del instrumento palpador navegado, a partir de los datos de posición del plano de entrada de la pelvis y a partir de los datos de posición de las dos espinas ilíacas anterosuperiores del hueso pélvico , determina un plano de gota de lágrima que se extiende a través del punto de gota de…
PROCEDIMIENTO Y DISPOSITIVO PARA LA PREPARACION DE UN IMPLANTE A PARTIR DE UN MATERIAL DE IMPLANTE.
(13/04/2010) Procedimiento para la preparación de un implante destinado a rellenar un defecto en un cuerpo humano o animal a base de un material de implante , en el cual se facilita una imagen del defecto que presenta un contorno de defecto , sobre el cual está representado un primer cuerpo de calibrado dispuesto en o junto al defecto , donde sobre el material de implante que se trata de mecanizar o junto a éste se dispone un segundo cuerpo de calibrado que se corresponde con el primer cuerpo de calibrado , efectuándose una toma de imagen en tiempo real del material de implante y representándolo en tiempo real sobre un dispositivo visualizador , representándose la imagen del defecto obtenida sobre el dispositivo visualizador superponiéndolo con la imagen en tiempo real de tal modo que el primer…
DISPOSITIVO DE LOCALIZACION PARA VERIFICACION DE POSICION.
(16/06/2009) Un aparato capaz de comprobar de manera cruzada los puntos palpados obtenidos con un dispositivo de localización, comprendiendo dicho aparato: sensores para detectar una herramienta quirúrgica que tiene un marcador , obteniendo al menos cuatro puntos palpados dicha herramienta quirúrgica para palpar un objeto ; una memoria ; y un ordenador acoplado a dichos sensores y dicha memoria , caracterizado porque dicho ordenador está configurado para determinar la precisión de uno de dichos al menos cuatro puntos palpados basándose en dichos al menos cuatro puntos palpados y los puntos correspondientes de datos obtenidos de una imagen preoperatoria de dicho objeto , generando dicho ordenador un indicador si se determina que uno de dichos al menos…
DISPOSITIVO REFERENCIADOR DE ROTULA.
Secciones de la CIP Necesidades corrientes de la vida Física
(16/03/2009). Ver ilustración. Solicitante/s: AESCULAP AG. Clasificación: A61B19/00, A61F2/46, G01S5/18.
Dispositivo referenciador de rótula para determinar la posición espacial de una rótula de una articulación de rodilla humana durante una intervención quirúrgica apoyada por navegación, que comprende un cuerpo base que puede inmovilizarse sobre la rótula , un elemento referenciador que puede detectarse mediante un dispositivo de verificación , caracterizado porque el dispositivo referenciador de rótula comprende además un dispositivo de unión para la unión desmontable del cuerpo base y del elemento referenciador en una primera posición de referencia y en sólo una única segunda posición de referencia adicional, que difiere de la primera posición de referencia y girada 180º con relación a la primera posición de referencia.
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LA MOVILIDAD DE UNA PROTESIS DE ARTICULACION DE CADERA.
Secciones de la CIP Necesidades corrientes de la vida Física
(01/08/2008). Ver ilustración. Solicitante/s: AESCULAP AG. Clasificación: A61B19/00, A61F2/46, A61B5/103, A61B5/107, G01S5/18.
Procedimiento para la determinación de la movilidad de una prótesis de articulación de cadera, con un casquillo de cojinete implantable en el hueso iliaco y un vástago de prótesis implantable en el fémur, que apoya con una superficie de articulación esférica en el casquillo de cojinete, caracterizado porque se gira el fémur con el vástago de prótesis en diferentes direcciones todo lo más posible, porque se comprueba si al hacerlo se separan entre sí el punto central del casquillo de cojinete y el punto central de la superficie de articulación esférica, y porque de este modo se determina para cada dirección de giro el ángulo de giro máximo en el cual los puntos centrales comienzan a distanciarse entre sí.
DISPOSITIVO PARA LA DETERMINACION DEL ANGULO ENTRE FEMUR Y TIBIA.
(16/05/2008) Dispositivo para la determinación del ángulo entre fémur y tibia en la implantación de una prótesis de rodilla unicondilar, con un sistema de navegación , un dispositivo de procesamiento de datos, un instrumento para la definición de la posición de una superficie de apoyo para un implante unicondilar en la tibia y/o en el fémur cuya posición relativa a la posición de la superficie no modificada de la articulación puede determinarse mediante el sistema de navegación , con un instrumento palpador controlado por navegación para la determinación de la posición de la superficie no modificada de la articulación y con una memoria en el dispositivo de procesamiento…
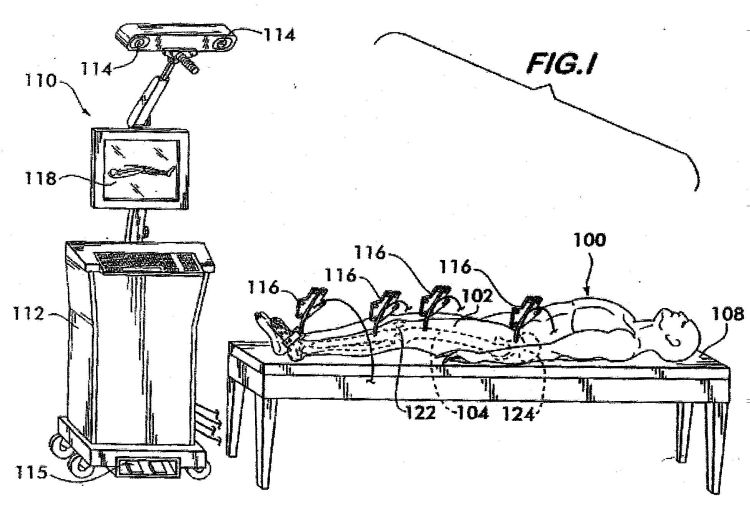
PROCEDIMIENTO Y APARATO PARA CAPTURAR INFORMACION ASOCIADA CON UNA INTERVENCION QUIRURGICA REALIZADA USANDO UN DISPOSITIVO DE LOCALIZACION.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2008). Ver ilustración. Solicitante/s: AESCULAP AG. Clasificación: A61B19/00.
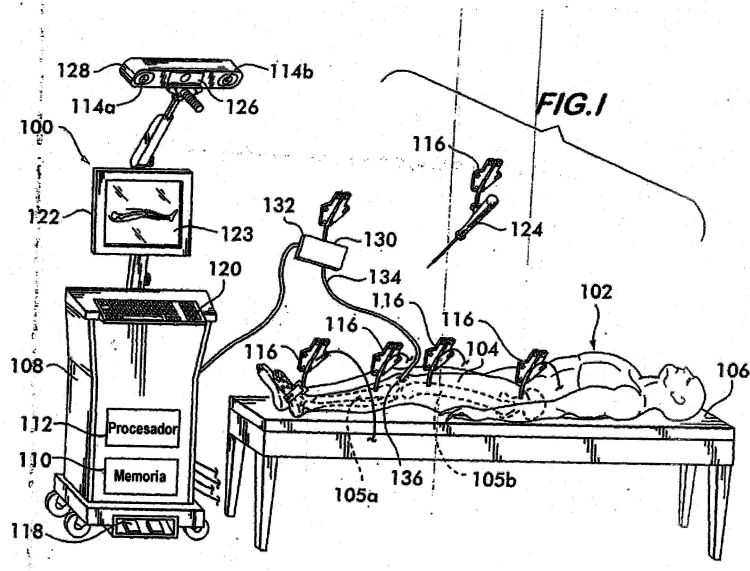
Un procedimiento para capturar información asociada con una intervención quirúrgica, comprendiendo dicho procedimiento las etapas de: controlar las coordenadas de un instrumento con un dispositivo de localización que define un primer campo de visión, ubicado dicho instrumento dentro de dicho primer campo de visión; adquirir una imagen de campo con una cámara que tiene un segundo campo de visión, incluyendo dicho segundo campo de visión al menos una parte de dicho primer campo de visión; y capturar dichas coordenadas de dicho instrumento y una imagen de campo en respuesta a un evento designado, en el que dicho evento designado lo genera automáticamente el dispositivo de localización en un punto predefinido en el tiempo durante la intervención quirúrgica.
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO DE PARAMETROS POSICIONALES DE UN INSTRUMENTO DE UN DISPOSITIVO DE LOCALIZACION.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2008). Ver ilustración. Solicitante/s: AESCULAP AG. Clasificación: A61B19/00.
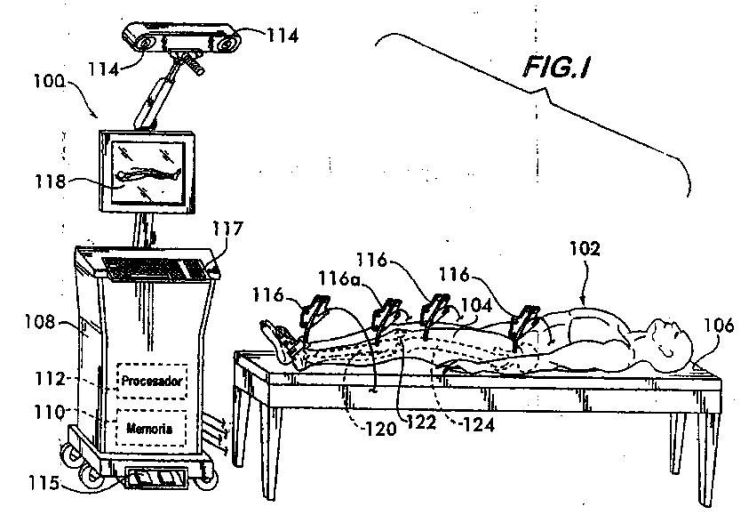
Un procedimiento no quirúrgico para registrar parámetros posicionales de un instrumento manejado usando un dispositivo de localización, comprendiendo el procedimiento las etapas de: controlar la posición de un instrumento con dicho dispositivo de localización; y registrar automáticamente al menos un parámetro posicional asociado con dicho instrumento si una parte de dicho instrumento se mueve menos de una cantidad predeterminada durante un periodo de tiempo predeterminado.
PROCEDIMIENTO PARA DETERMINAR LA POSICION DEL PUNTO ARTICULAR DE UNA ARTICULACION.
(16/10/2007) Un procedimiento para determinar la posición de un punto articular de una articulación central entre dos cuerpos sustancialmente rígidos, estando localizada la articulación central entre unas articulaciones externas primera y segunda localizadas en los extremos de dichos cuerpos rígidos primero y segundo distales a dicha articulación central, respectivamente, comprendiendo dicho procedimiento los pasos de: identificar la posición de un primer punto sobre dicho primer cuerpo rígido localizado sustancialmente en dicha articulación central; determinar la posición de un primer punto articular de dicho primer cuerpo rígido en dicha primera articulación externa ; definir un primer eje entre dicho primer punto articular…
PROCEDIMIENTO Y APARATO DE VISUALIZACION DE UN DISPOSITIVO DE LOCALIZACION.
Sección de la CIP Necesidades corrientes de la vida
(16/08/2007). Ver ilustración. Solicitante/s: AESCULAP AG & CO. KG. Clasificación: A61B17/00, A61B19/00, A61B17/17.
Un procedimiento para generar una visualización para su uso con un dispositivo de localización, identificando el dispositivo de localización una localización de referencia, comprendiendo el procedimiento las etapas de: controlar la distancia entre una punta de un puntero y dicha localización de referencia; y visualizar una vista entre una pluralidad de vistas en base a dicha distancia controlada, en el que dicha etapa de visualización comprende al menos las etapas de: visualizar una primera vista entre una pluralidad de vistas; cambiar de una primera vista a una segunda vista entre dicha pluralidad de vistas cuando dicha punta del puntero esté a una distancia de dicha localización de referencia que sea inferior a una primera distancia; y cambiar de dicha segunda vista a dicha primera vista cuando dicha punta del puntero esté a una distancia respecto de dicha localización de referencia que sea mayor que una segunda distancia, en el que dichas primera y segunda distancias son diferentes.
DISPOSITIVO PARA LA DETERMINACION DE LA POSICION DE UNA ENDOPROTESIS DE ARTICULACION DE LA RODILLA.
(01/09/2006) Sistema para la determinación de la posición de la parte de tibia y/o de la parte de fémur de una endoprótesis de articulación de la rodilla respecto a la cabeza proximal de tibia o al fémur distal con un sistema de navegación para controlar la posición del fémur y de la tibia mediante elementos marcadores que pueden fijarse en éstos, con un equipo de distracción , que desplaza el fémur distal y la cabeza proximal de la tibia con la rodilla estirada y doblada en la dirección lateral y medial con una fuerza definida a una posición separada, con una instalación de procesamiento de datos , que determina las posiciones relativas de fémur y tibia en esta distracción y, por lo tanto, la medida de la rendija entre el fémur y la tibia y que calcula…
DISPOSITIVO PARA DETERMINAR LA POSICION DEL PUNTO DE SALIDA TIBIAL DEL LIGAMENTO CRUZADO DELANTERO.
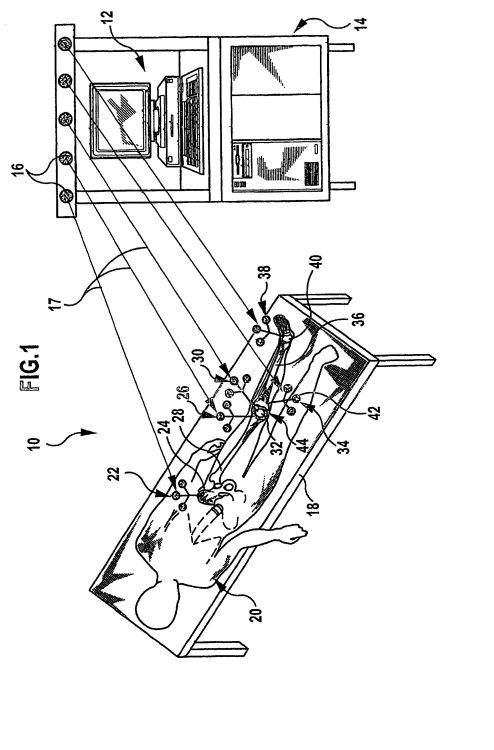
(01/08/2006) Dispositivo para determinar la posición del punto de salida de un implante que sustituye el ligamento cruzado delantero de una articulación de rodilla , en el lado superior de la tibia , con un sistema de navegación , con elementos marcadores unidos fijamente con el fémur y la tibia , con un palpador navegado y con un equipo de procesamiento de datos que presenta una memoria y una unidad de cálculo, al que se pueden suministrar los datos de posición, registrados por el sistema de navegación , relativos a varios puntos a lo largo del canto delantero de la incisura , y depositarlos en la memoria, caracterizado porque la unidad de cálculo está programada de tal forma que proyecte los datos de posición, depositados en la memoria, y por lo tanto la extensión del canto delantero de la incisura con la pierna…
PROCEDIMIENTO Y DISPOSITIVO ARA LA DETERMINACION DEL EJE MECANICO DE UN FEMUR.
Sección de la CIP Necesidades corrientes de la vida
(16/12/2004). Ver ilustración. Solicitante/s: AESCULAP AG & CO. KG. Clasificación: A61B19/00, A61B17/15.
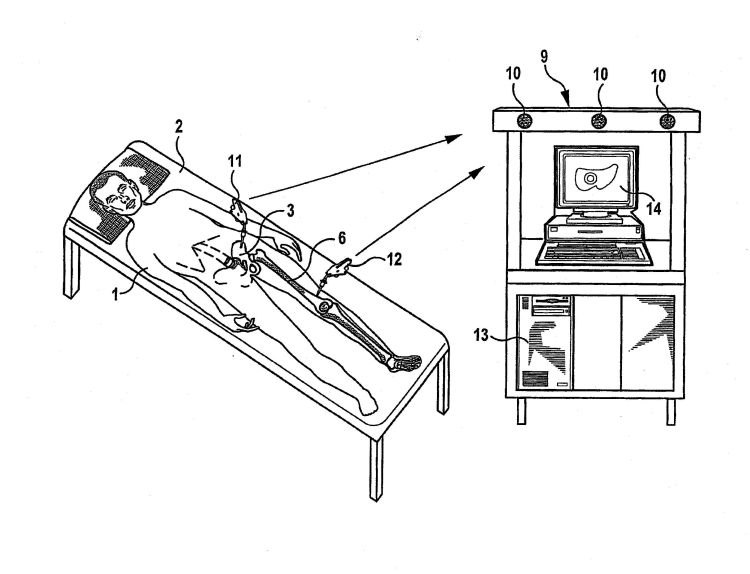
Procedimiento para la determinación del eje mecánico de un fémur, en el que el fémur se mueve alrededor de la articulación de la cadera, se sigue el movimiento del fémur mediante un elemento de marcación en el fémur a través de un sistema de navegación, se almacenan los datos de posición del fémur así obtenidos y a partir de los distintos datos de posición del fémur en distintas posiciones se calcula relativamente respecto a éste la posición del eje mecánico del fémur, caracterizado porque se bascula el fémur en distintas direcciones desde una posición de partida sólo en un ángulo máximo de basculación de 15º y porque se calcula el eje mecánico del fémur a partir de los datos de posición de la superficie barrida por el elemento de marcación y a partir de los datos de posición, determinados de otra manera, de la articulación de la rodilla.
PROCEDIMIENTO Y DISPOSITIVO PAPRA LA DETERMINACION PREOPERATIVA DE LOS DATOS DE LA POSICION DE PIEZAS DE ENDOPROTESIS.
Sección de la CIP Necesidades corrientes de la vida
(01/07/2003). Solicitante/s: AESCULAP AG & CO. KG. Clasificación: A61F2/30.
Se describe un proceso para la determinación preoperativa de datos de posicionamiento de partes de endoprótesis de una articulación central, con relación a los huesos que forman la articulación central. A fin de detectar la posición de los huesos en el cuerpo sin un proceso complejo, un punto de articulación exterior está determinado porque los huesos se desplazan alrededor de una articulación exterior situada en el extremo de ambos huesos, lejos de la articulación central, un punto de la articulación está determinado para cada hueso en la región de la articulación central, una dirección característica para ambos huesos está determinada interconectando los dos puntos de la articulación así detectados para cada hueso con una línea recta, y se determina la orientación de las partes de la endoprótesis con relación a esta dirección característica. Se describe también un dispositivo para poner en práctica este proceso.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}