ACCCIONAMIENTO DE TORNILLO Y CUERPOS RODANTES.
(09/03/2012) Accionamiento de tornillo y cuerpos rodantes con un husillo de tornillo que está rodeado por una tuerca , en el que una estría de rosca de forma helicoidal del husillo y una estría de rosca correspondiente a ésta en la tuerca forman un canal para cuerpos rodantes portantes que está realizado como una pista continua de circulación de cuerpos rodantes, y en el que está inserta en la pista de circulación una jaula formada por una banda elástica dotada de un alma periférica dispuesta al menos en un lado, y los cuerpos rodantes se encuentran en rebajos de la jaula, y en el que los rebajos de la jaula están limitados por cuerpos de separación que están realizados en una sola pieza con el alma y se extienden radialmente con respecto…
TRANSMISIÓN DE ROSCA A BOLAS.
(27/06/2011) Transmisión de rosca a bolas que comprende una tuerca de husillo dispuesta de forma giratorias sobre un husillo y bolas que circulan en canales de bolas sin fin limitados por la tuerca de husillo y el husillo , y un rodamiento, especialmente un cojinete de bolas, a través del cual la tuerca de husillo está axial y radialmente montada en una carcasa , estando previsto un elemento de muelle axialmente pretensado para realizar un pretensado axial de la tuerca de husillo con respecto a la carcasa o a una pieza solidaria de la carcasa, caracterizada porque el elemento de muelle se apoya en la tuerca de husillo a través de un cojinete axial
ESTABILIZADOR DE BALANCEO PARA UN VEHÍCULO AUTOMÓVIL Y CARCASA PARA EL ESTABILIZADOR DE BALANCEO.
(01/03/2011) Estabilizador de balanceo para un vehículo automóvil con una primera y una segunda partes de estabilizador que pueden asociarse y/o están asociadas cada una de ellas a una rueda de un eje transversal común del vehículo automóvil, con una carcasa que esta concebida para un montaje solidario del vehículo automóvil y en la que están alojadas las dos partes del estabilizador para la realización de movimientos de basculación en el mismo sentido y en sentidos contrarios, y con un dispositivo actuador que comprende un motor eléctrico y un mecanismo de transmisión , estando concebido y/o dispuesto el motor eléctrico para generar un par de giro y estando…
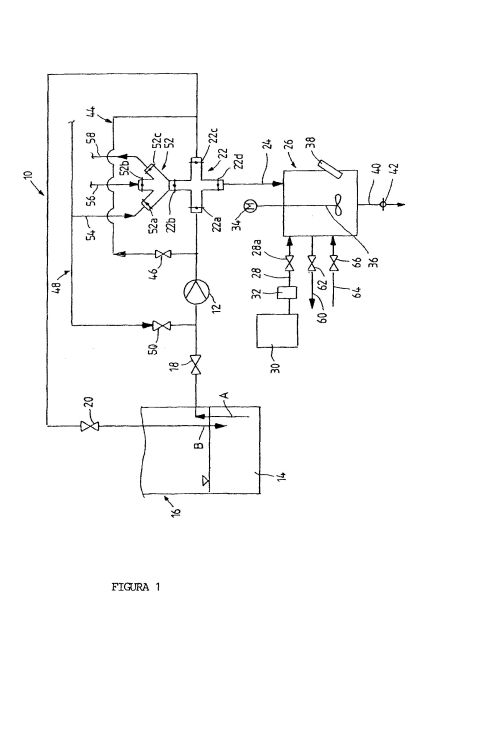
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR EL CONTENIDO DE CACO3 DE UN LIQUIDO DE LAVADO.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/04/2009). Ver ilustración. Solicitante/s: LURGI LENTJES AG. Clasificación: B01D53/34, B01D53/50, G01N31/22, G01N27/416.
Procedimiento para determinar el contenido de CaCO 3 de un líquido de lavado extraído de un circuito de líquido de lavado de una torre de lavado que presenta las etapas: - descargar un volumen de muestra de líquido de lavado predeterminado de un caudal de líquido de lavado continuamente disponible, - introducir el volumen de muestra de líquido de lavado en una celda de medición , - dosificar e introducir un volumen de HCl predeterminado en la celda de medición, - mezclar los volúmenes introducidos, - esperar un tiempo de reacción predeterminado, - medir el valor de pH y - registrar el contenido de CaCO3 del volumen de muestra basándose do en el cambio del valor de pH medido.
MECANISMO DE ROSCA A BOLAS.
(16/08/2008) Mecanismo de rosca a bolas con una tuerca de husillo dispuesta de forma giratoria sobre un husillo de rodadura sobre bolas, entre la cual y el husillo de rodadura sobre bolas ruedan bolas en estrías de bolas, y con una rueda de accionamiento unida de manera solidaria en rotación con la tuerca del husillo y destinada a accionar la tuerca del husillo, pudiendo montarse la tuerca del husillo en una carcasa por medio de un cojinete, especialmente un rodamiento , presentando el cojinete un aro exterior que puede inmovilizarse en la carcasa , caracterizado porque el aro exterior de forma de L, visto en sección longitudinal, presenta un anillo que…
SISTEMA DE AYUDA AL APARCAMIENTO Y PROCEDIMIENTO CORRESPONDIENTE.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(01/12/2006). Solicitante/s: INA-SCHAEFFLER KG. Clasificación: G01S13/93, B60Q1/48.
Procedimiento para accionar un sistema de ayuda al aparcamiento para un vehículo con al menos un sensor de distancia, que registra al menos por segmentos la zona lateral cercana del vehículo, y al menos un sensor de recorrido, que registra el recorrido realizado por el vehículo, determinándose la longitud y/o la anchura del espacio libre de aparcamiento a partir de los valores medidos por los sensores al pasar delante de un espacio libre de aparcamiento, caracterizado porque la medición se realiza en diferentes intervalos de tiempo mediante el sensor de distancia en función de la velocidad (v) del vehículo al pasar delante del espacio libre de aparcamiento.
{kind=link}