Unidad GPS móvil que presenta un estado de potencia reducida.
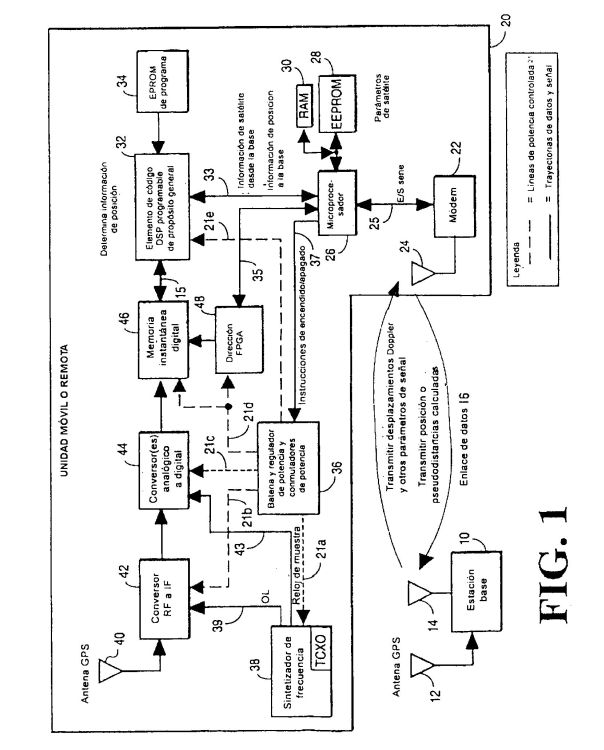
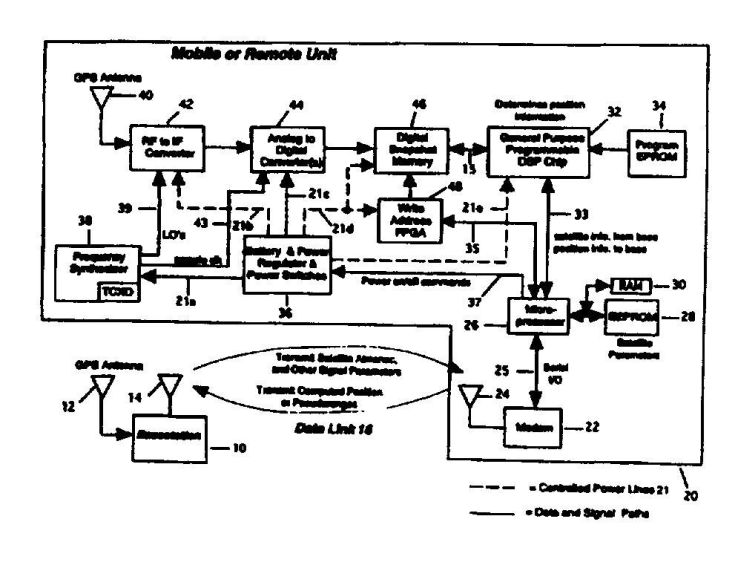
(30/03/2012) Unidad GPS móvil que presenta un estado de potencia reducida, comprendiendo la unidad GPS móvil:
- un receptor para recibir señales GPS procedentes de satélites visionados;
- una memoria acoplada al receptor para almacenar muestras GPS IF;
- un procesador acoplado a la memoria, procesando el procesador las muestras GPS IF para proporcionar por lo menos una información de pseudodistancia a partir de las muestras GPS IF, caracterizada porque la unidad GPS móvil comprende asimismo
- un circuito de gestión de potencia acoplado a una sección de recepción GPS del receptor, reduciendo el circuito de gestión de potencia la potencia consumida por la sección de recepción GPS del receptor de la unidad GPS móvil de un estado de potencia máxima, al tiempo…
RECEPTOR GPS PERFECCIONADO QUE UTILIZA INFORMACIÓN DE LA POSICIÓN DE LOS SATÉLITES PARA COMPENSAR EL EFECTO DOPPLER.
(09/02/2012) Procedimiento para determinar la posición de una unidad remota , que comprende: recibir, en dicha unidad remota , datos de almanaque de satélites comprimidos u otra representación de datos de almanaque para una pluralidad de satélites de un sistema de posicionamiento por satélite, desde una estación base situada en una posición separada o desde otro satélite que emula una estación base; determinar la hora del día y la posición aproximada de la unidad remota; obtener la información Doppler para una pluralidad de dichos satélites de dicho sistema de posicionamiento por satélite, a partir de dichos datos de almanaque de satélites comprimidos u otra representación de datos de almanaque, utilizando la hora del día y la posición aproximadas; recibir señales GPS a partir de dichos satélites…
RECEPTOR GPS Y PROCEDIMIENTO PARA EL PROCESAMIENTO DE SEÑALES GPS.
(27/09/2011) Procedimiento de seguimiento que utiliza satélites de un sistema de posicionamiento global vía satélite (GPS) para determinar la posición de un sensor remoto, comprendiendo el procedimiento: recibir y almacenar señales GPS en dicho sensor remoto procedentes de una pluralidad de satélites GPS que están a la vista; calcular las seudodistancias en el sensor utilizando dichas señales GPS, transmitir dichas seudodistancias desde dicho sensor a una estación base, estando provista dicha estación base de datos de las efemérides de satélites GPS; y recibir dichas seudodistancias en dicha estación base y utilizar dichas seudodistancias y dichos datos de las efemérides de satélites para calcular una localización geográfica para dicho sensor, en el que el cálculo de los seudodistancias comprende: almacenar las señales GPS recibidas en una memoria, y caracterizado…
RECEPTOR GPS Y PROCEDIMIENTO PARA EL PROCESAMIENTO DE SEÑALES GPS.
(28/07/2011) Aparato receptor GPS, que comprende: una antena para recibir señales GPS a una frecuencia RF desde los satélites visionados; un desmodulador acoplado a dicha antena, reduciendo dicho desmodulador la frecuencia RF de dichas señales GPS recibidas a una frecuencia intermedia (IF); un digitalizador acoplado a dicho desmodulador y que recibe dichas señales GPS IF, muestreando dicho digitalizador dichas señales GPS IF a una tasa predeterminada para producir las señales GPS IF; una memoria acoplada a dicho digitalizador, almacenando dicha memoria las señales GPS IF muestreadas; y un procesador de señales digitales (DSP) (32a)…
PROCEDIMIENTO Y APARATO PARA PROCESAMIENTO DE MEDICIÓN DE SEÑALES DE UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE (SPS).
(13/07/2011) Un procedimiento de procesado de las señales (SPS) de un sistema de posicionamiento por satélite, comprendiendo el mencionado procedimiento: determinar un primer posible pico de correlación para un primer conjunto de señales SPS provenientes de un primer satélite SPS; determinar un segundo posible pico de correlación para el mencionado primer conjunto de señales SPS; derivar una medida que sea representativa de un tiempo de llegada del mencionado primer conjunto de señales SPS a partir de uno del mencionado primer pico de correlación posible y del mencionado segundo pico de correlación posible caracterizado por comprender, además:…
PROCEDIMIENTO Y APARATO PARA ADQUIRIR SEÑALES DEL SISTEMA DE POSICIONAMIENTO DE SATÉLITES.
(25/05/2011) Un procedimiento para adquirir inicialmente señales del sistema de posicionamiento de satélites, SPS, procedimiento implementado en un receptor del SPS y que comprende: determinar un primer tiempo de llegada de una secuencia seudoaleatoria, PN, época de una señal de un primer satélite del SPS con respecto a una época de PN de referencia que está generada localmente en el receptor del SPS; determinar una ubicación estimada de dicho receptor del SPS; determinar un tiempo del día; determinar una posición de dicho primer satélite del SPS y una posición de un segundo satélite del SPS, usando dicho tiempo del día…
PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE.
(09/05/2011) Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia inicial de reloj con una desviación de reloj desconocido, comprendiendo dicho procedimiento: en dicha primera entidad, medir un conjunto de tiempo de llegada de señales de distancia desde la pluralidad de satélites como una función de dicha referencia inicial de reloj, para proporcionar un conjunto inicial de valores medidos de distancia; caracterizado por: determinar cada uno, entre una pluralidad de valores de estadísticas de errores, como una función de una pluralidad de desplazamientos…
CORRECCIÓN LO EN UN RECEPTOR GPS.
(25/04/2011) Procedimiento para la corrección de una señal generada por un oscilador local en un receptor GPS móvil, comprendiendo dicho procedimiento: recibir una señal modulada sobre una frecuencia portadora de precisión desde una fuente que proporciona dicha señal modulada, siendo dicha fuente una estación base o un satélite que emula a una estación base; enganchar automáticamente a dicha señal modulada y proporcionar una señal de referencia enganchada en frecuencia a la frecuencia portadora de precisión; calcular la deriva del oscilador local mediante la comparación de la señal de referencia con una señal generada por dicho oscilador local y generar una señal de corrección de error, transmitir dicha señal de corrección de error a un componente DSP para eliminar…
RECEPTOR GPS Y MÉTODO PARA PROCESAMIENTO DE SEÑALES GPS.
(24/02/2011) Un método para utilizar un receptor GPS teniendo un sistema de comunicación, comprendiendo dicho método: activar dicho receptor GPS en un primer modo de operación (como un receptor GPS convencional 12) el cual comprende: recibir las señales GPS de satélites en vista; desmodular dichas señales GPS para extraer la información del satélite con respecto a los satélites en vista y computar la información de seudo distancia para dichos satélites en vista; activar dicho receptor GPS en un segundo modo de operación (como un receptor GPS de toma instantánea 14) el cual comprende: recibir las señales GPS de los satélites en vista; procesar dichas señales GPS para determinar las seudo distancias…
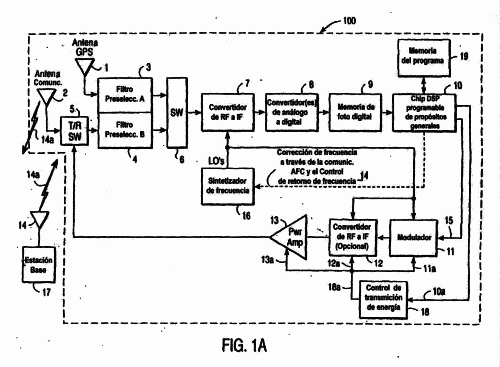
SISTEMA DE POSICIONAMIENTO GPS COMBINADO Y SISTEMA DE COMUNICACIONES UTILIZANDO UN CIRCUITO COMPARTIDO.
(08/02/2011) Un método para llevar a cabo funciones del Sistema de Posicionamiento Global (GPS) y funciones de comunicación celular en un sistema de comunicación integrado, comprendiendo dicho método: convertir señales GPS de radio frecuencia (RF) y señales de comunicación celular RF en un convertidor de frecuencia intermedia (IF) compartida RF , donde en dicho convertidor RF a IF compartido convierte dichas señales GPS de una primera frecuencia a una segunda frecuencia la cual es menor que dicha primera frecuencia y dicho convertidor RF a IF compartido convierte dichas señales de comunicación celular RF desde una tercera frecuencia a una cuarta frecuencia la cual es menor que dicha tercera frecuencia,…
REDUCCION DE INTERFERENCIA CRUZADA EN UN RECEPTOR GPS Y UN SISTEMA DE COMUNICACION COMBINADOS.
(24/06/2010) Un método para reducir la interferencia en un receptor de un sistema de posicionamiento por satélites, debida a las transmisiones en una unidad de comunicación alojada junto al mismo, comprendiendo dicho método:
- la recepción de señales del sistema de posicionamiento por satélites procedentes de una pluralidad de satélites del sistema de posicionamiento por satélites, por parte de dicho receptor del sistema de posicionamiento por satélites;
- el establecimiento de una conexión de comunicación a través de dicha unidad de comunicación acoplada a dicho receptor del sistema de posicionamiento por satélites, siendo operable dicha unidad de comunicación para transmitir datos sobre dicha conexión de comunicación establecida, en el cual dichos datos son transmitidos…
PROCEDIMIENTO Y APARATO PARA OPERAR UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE.
(01/06/2010) Un procedimiento para operar un aparato de localización en un sistema de posicionamiento por satélite, que comprende:
determinar y almacenar una pluralidad de parámetros de corrección diferencial de pseudorrangos del GPS, cada uno con un correspondiente sello temporal de parámetros de corrección diferencial del GPS, caracterizado por:
recibir una o más transmisiones desde una o más unidades móviles (12, 102b, 103b, 104b), comprendiendo las transmisiones conjuntos de pseudorrangos, teniendo cada conjunto un correspondiente sello temporal de pseudorrango; y
seleccionar, comparando los sellos temporales de parámetros de corrección diferencial del GPS y los sellos temporales de pseudorrangos, un parámetro de corrección diferencial del GPS y un conjunto de pseudorrangos, siendo el…
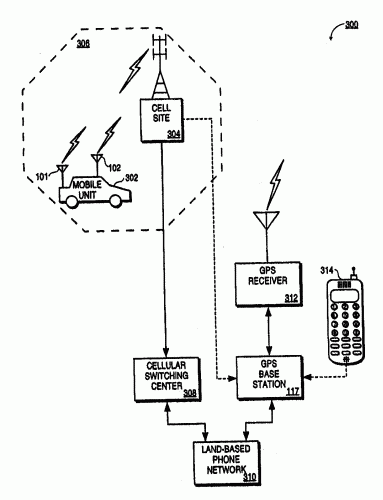
PROCEDIMIENTO Y APARATO PARA MEDIR LA FRECUENCIA DE UNA ESTACION BASE EN REDES CELULARES USANDO RECEPTORES GPS MOVILES.
(25/05/2010) Un procedimiento para medir una frecuencia relacionada con una estación base de un sistema de comunicación celular, comprendiendo el procedimiento:
recibir , en una primera estación móvil, una primera señal celular desde la estación base, conteniendo la primera señal celular un primer marcador de sincronismo;
determinar una primera etiqueta temporal para el primer marcador de sincronismo con respecto a al menos una señal de sistema de posicionamiento por satélite recibida en la primera estación móvil;
determinar una primera ubicación de la primera estación móvil a partir de al menos una señal de sistema de posicionamiento por satélite recibida en la primera estación móvil;
transmitir , a través de un enlace de comunicación…
SISTEMA Y PROCEDIMIENTO DE REFERENCIA DE POSICIONAMIENTO DE SATELITES.
(17/05/2010) Un sistema de procesamiento de la información de la posición de satélites, comprendiendo dicho sistema:
un primer sistema de posicionamiento de los satélites, SPS, un receptor de referencia (90 a 96, 104 a 108, 301) que tiene una primera posición conocida y que tiene una primera interfaz de comunicación la cual está acoplada a un medio de comunicación, transmitiendo dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS unos primeros datos de las efemérides de los satélites hasta dicho medio de comunicación, en el que "los datos de las efemérides de los satélites" incluyen el reloj de los satélites;
un segundo receptor de referencia (90 a 96, 104 a 108, 301) del SPS que…
RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES.
(19/04/2010) PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA LOCALIZACION APROXIMADA OBTENIDA DE UNA FUENTE DE INFORMACION DE UN SISTEMA CELULAR DE TELECOMUNICACIONES. EN OTRO ASPECTO DE LA INVENCION, SE UTILIZA UNA SEÑAL DE REFERENCIA PARA PROPORCIONAR UNA SEÑAL DE OSCILADOR LOCAL QUE ES UTILIZADA PARA OBTENER SEÑALES SPS EN UN RECEPTOR SPS. ESTA SEÑAL DE REFERENCIA ES EXTRAIDA DE UNA SEÑAL DE DATOS MODULADA SOBRE UNA FRECUENCIA PORTADORA. ESTA SEÑAL DE DATOS ES TRANSMITIDA DEL SITIO DE UNA RADIO CELULAR QUE ESTA EN COMUNICACION CON EL RECEPTOR SPS QUE TIENE UN RECEPTOR DE COMUNICACIONES…
SISTEMA Y METODO CORRELADOR ALTAMENTE PARALELO PARA GPS.
(02/07/2009) Método para procesar señales de un sistema de posicionamiento satelital (SPS), donde dicho método comprende las siguientes etapas: recepción de un conjunto de muestras de señales SPS de un transmisor SPS específico; realización de una primera correlación de dicho conjunto de muestras de señales SPS con una primera secuencia pseudoaleatoria usando un primer multiplicador y sumador para proporcionar un primer resultado correlacionado; y realización de una segunda correlación de dicho conjunto de muestras de señales SPS con una segunda secuencia pseudoaleatoria utilizando dicho primer multiplicador y sumador para proporcionar un segundo resultado correlacionado, y donde dicha segunda secuencia pseudoaleatoria corresponde a dicha primera secuencia pseudoaleatoria desplazada en el tiempo, y donde el sumador…
PROCEDIMIENTO Y APARATO PARA DETERMINACION DE TIEMPOS EN UN SISTEMA DE POSICIONAMIENTO POR SATELITE.
Sección de la CIP Física
(18/06/2009). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S5/00, G01S5/14.
Un procedimiento para determinar una referencia de tiempo asociado a un sistema de posicionamiento por satélite, comprendiendo dicho procedimiento: comparar un primer registro de al menos una porción de un mensaje de satélite, que es recibido por una primera entidad, con un segundo registro de dicho mensaje de satélite, con un valor de tiempo asociado, a fin de determinar un primer valor de tiempo, en donde dicho segundo registro de dicho mensaje de satélite es recibido en una segunda entidad; y determinar un segundo valor de tiempo basado en un conjunto de valores de estadística de errores para un conjunto de valores de distancia y el primer valor de tiempo, en donde dicho segundo valor de tiempo indica dicho tiempo de referencia.
METODO Y APARATO PARA LA DETERMINACION DEL TIEMPO PARA LOS RECEPTORES DE GPS.
(29/05/2009) Método para la determinación de la posición de un receptor móvil de un sistema de posicionamiento global (GPS), estando dispuesto el receptor móvil GPS dentro de una célula proporcionada por un emplazamiento celular y estando acoplado a un dispositivo de comunicación celular de base celular que transmite y recibe señales de comunicación celular hacia y desde el emplazamiento celular , comprendiendo el método: supervisar, mediante un aparato remoto de dicho receptor móvil GPS , transmisiones de señales de comunicación celular correspondientes a las señales de comunicación celular recibidas por dicho dispositivo de comunicación celular de base celular de dicho emplazamiento celular ; determinar mediante dicho aparato un tiempo del día de por lo menos un parte de dichas transmisiones; recibir mediante dicho aparato , de dicho…
PROCEDIMIENTO Y APARATO DE PROCESAMIENTO DE MEDICION DE SEÑALES DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE (SPS).
Sección de la CIP Física
(01/04/2009). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S1/00.
Un procedimiento de procesado de las señales de un sistema de posicionamiento por satélite, comprendiendo el mencionado procedimiento: determinar un primer posible pico de correlación para un primer conjunto de señales SPS provenientes de un primer satélite SPS; determinar un segundo posible pico de correlación para el mencionado primer conjunto de señales SPS; derivar una medida que sea representativa de un tiempo de llegada del mencionado primer conjunto de señales SPS a partir de uno del mencionado primer pico de correlación posible y del mencionado segundo pico de correlación posible en el que la mencionada derivación de una medida se realiza junto con datos de entorno de la señal conocidos anteriormente derivados de al menos uno de los siguientes: señales sin hilos recibidas, entrada proporcionada por el usuario, información de objeto de celda recibida a través de un emplazamiento celular servidor y sensores que incluyen un velocímetro y un giroscopio.
PROCEDIMIENTO Y APARATO DE PROCESAMIENTO DE MEDICIONES DE SE|ALES DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE (SPS).
Sección de la CIP Física
(01/04/2009). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S1/00.
Un procedimiento para la determinación de una posición de un receptor de un Sistema de Posicionamiento por Satélite (SPS), comprendiendo dicho procedimiento: recepción de una señal de SPS de un satélite de SPS; caracterización de un entorno de la señal determinando al menos uno de los valores seleccionados del ancho de pico de una salida de correlación de dicha señal de SPS o una relación de señal a interferencia (SIR) de dicha señal de SPS; almacenamiento de la caracterización en una base de datos basada en células, con lo que la caracterización se asocia con un sitio de células de dicho receptor de SPS; y determinación de dicha posición de dicho receptor de SPS utilizando dicho valor seleccionado del ancho de pico o dicha SIR recuperada de dicha base de datos basada en células.
RECEPTOR GPS Y PROCEDIMIENTO PARA EL PROCESAMIENTO DE SEÑALES GPS.
(16/03/2009) EN UNA EJECUCION, UN RECEPTOR GPS INCLUYE UNA ANTENA QUE RECIBE SEÑALES GPS EN UNA FRECUENCIA RF DE SATELITES A LA VISTA; UN CONVERTIDOR REDUCTOR ACOPLADO A LA ANTENA PARA REDUCIR LA FRECUENCIA RF DE LAS SEÑALES GPS RECIBIDAS A UNA FRECUENCIA INTERMEDIA (IF); UN DIGITALIZADOR ACOPLADO AL CONVERTIDOR REDUCTOR Y MUESTREO DE LAS SEÑALES GPS DE IF A UNA VELOCIDAD PREDETERMINADA PARA PRODUCIR SEÑALES GPS DE IF MUESTREADAS; UNA MEMORIA ACOPLADA AL DIGITALIZADOR QUE ALMACENA LAS SEÑALES GPS DE IF MUESTREADAS (UNA INSTANTANEA DE LAS SEÑALES GPS); Y UN PROCESADOR DE SEÑALES DIGITAL (DSP) ACOPLADO A LA MEMORIA Y QUE FUNCIONA BAJO LAS…
PROCEDIMIENTO Y APARATO PARA PROCESAMIENTO DE MEDICION DE SEÑALES DE SISTEMA POSICIONAMIENTO POR SATELITE (SPS).
(01/03/2009) Un procedimiento de medición de tiempos de llegada de señales de satélite recibidas en un receptor de sistema de posicionamiento por satélite (SPS), comprendiendo dicho procedimiento: recibir una pluralidad de señales SPS desde una pluralidad de satélites SPS; caracterizar un entorno de señal correspondiente a la ubicación en la que está ubicado dicho receptor SPS, para producir datos del entorno que representan una manera en la que se propagan las señales SPS localmente hasta dicha ubicación, en el que los datos del entorno se obtienen a partir de al menos uno de lo siguiente: señales inalámbricas recibidas, entrada proporcionada por el usuario, información de objeto de celda recibida a través de un emplazamiento celular de servicio, y sensores que incluyen un velocímetro o giroscopio;…
RECEPTOR GPS PERFECCIONADO QUE UTILIZA UN ENLACE DE COMUNICACION.
Secciones de la CIP Electricidad Física
(16/04/2008). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: H04B7/185, G01S5/00, G01S5/14, H04B1/28, G01S1/04, G01S5/02, H03J7/04, G01S1/00.
UNA SEÑAL DE FRECUENCIA DE PORTADORA DE PRECISION PARA CALIBRAR UN OSCILADOR LOCAL DE UN RECEPTOR GPS QUE SE UTILIZA PARA ADQUIRIR SEÑALES GPS. LA SEÑAL DE FRECUENCIA DE PORTADORA DE PRECISION SE UTILIZA PARA CALIBRAR EL OSCILADOR LOCAL, DE FORMA QUE LA SALIDA DEL OSCILADOR LOCAL, QUE SE UTILIZA PARA ADQUIRIR SEÑALES GPS, SE MODIFICA MEDIANTE UNA SEÑAL DE REFERENCIA GENERADA DE LA SEÑAL DE FRECUENCIA DE PORTADORA DE PRECISION. EL RECEPTOR GPS EXAMINA ESTA SEÑAL DE FRECUENCIA DE PORTADORA DE PRECISION Y GENERA LA SEÑAL DE REFERENCIA. EN OTRO ASPECTO DE LA INVENCION, SE TRANSMITEN DATOS DE ALMANAQUE SATELITE A UNA UNIDAD DE RECEPTOR GPS REMOTA DESDE UNA ESTACION BASE A TRAVES DE UN ENLACE DE COMUNICACIONES. LA UNIDAD DE RECEPTOR GPS REMOTA UTILIZA ESTOS DATOS DE ALMANAQUE SATELITE PARA DETERMINAR LOS DATOS DOPPLER APROXIMADOS PARA SATELITES QUE ESTAN A LA VISTA DE LA UNIDAD DE RECEPTOR GPS REMOTA.
PROCEDIMIENTO Y APARATO PARA OPERAR UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO POR SATELITE.
Secciones de la CIP Electricidad Física
(16/04/2008). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: H04Q7/34, G01S5/00, G01S5/14, G01S1/00.
Un procedimiento para hacer funcionar un receptor de un sistema móvil de posicionamiento por satélite (SPS), comprendiendo el mencionado procedimiento: la determinación de una primera pluralidad de pseudorrangos en un primer instante de tiempo; la determinación de una segunda pluralidad de pseudorrangos en un segundo instante de tiempo que es posterior al primer instante de tiempo; el almacenamiento de la mencionada primera pluralidad de pseudorrangos y el almacenamiento de la mencionada segunda pluralidad de pseudorrangos; caracterizado por la transmisión después del mencionado segundo instante de tiempo de la mencionada primera pluralidad de pseudorrangos y de la mencionada segunda pluralidad de pseudorrangos cada uno de ellos con su propia consigna de tiempo.
METODO Y MECANISMO PARA DETERMINAR EL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO DE SATELITE.
Sección de la CIP Física
(01/12/2006). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S5/14.
Un método para determinar el tiempo asociado a un sistema de posicionamiento de satélite, dicho método comprende los pasos implementados en la máquina de: Estimar la pluralidad de valores asociados con al menos uno de los rangos relativos y una posición relativa entre una entidad y un conjunto de satélites, en donde cada uno de dicha pluralidad de valores es asociado con un respectivo tiempo de medición, donde cada tiempo de medición y dicho tiempo asociado con dicha posición del satélite difieran por un primer desbalance, caracterizado por: determinar un primer conjunto de valores de la estadística del error usando cada tiempo de medición asociado con uno de dicha pluralidad de valores; alterar cada tiempo de medición por un segundo desbalance; determinar un segundo conjunto de valores de la estadística del error usando dicho tiempo de medición alterado; y basado en dicho segundo conjunto de valores de la estadística del error, determinar dicho primer desbalance.
METODO Y APARATO PARA LA DETERMINACION DEL TIEMPO PARA LOS RECEPTORES GPS.
Sección de la CIP Física
(16/02/2005). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S5/14, G01S1/04.
SE DESCRIBEN UN PROCEDIMIENTO Y UN APARATO PARA DETERMINAR EL TIEMPO PARA UN RECEPTOR DE UN SISTEMA DE POSICIONAMIENTO GLOBAL. LAS SEÑALES DE SINCRONIZACION QUE PROVIENEN DE UN SISTEMA DE COMUNICACIONES, TAL COMO LAS SEÑALES DE TRANSMISION DE TELEFONOS CELULARES, SON RECIBIDAS POR UN RECEPTOR GPS Y DECODIFICADAS PARA PROPORCIONAR UNA INFORMACION PRECISA SOBRE EL TIEMPO. LAS SEÑALES DE SINCRONIZACION PUEDEN ADOPTAR LA FORMA DE EVENTOS SINCRONIZADOS MARCADOS MEDIANTE INDICADORES DE SINCRONIZACION O COMO INFORMACION DE TIEMPO DEL SISTEMA. LAS SEÑALES DE SINCRONIZACION, EN COMBINACION CON LAS SEÑALES DE POSICION DEL SATELITE RECIBIDAS POR EL RECEPTOR GPS SON UTILIZADAS PARA DETERMINAR LA POSICION DEL RECEPTOR GPS.
SISTEMA COMBINADO DE POSICIONAMIENTO GPS Y DE COMUNICACIONES UTILIZANDO CIRCUITOS COMPARTIDOS.
Sección de la CIP Física
(16/05/2004). Ver ilustración. Solicitante/s: SNAPTRACK INC.. Clasificación: G01S5/14.
LA PRESENTE INVENCION SE REFIERE A UN SISTEMA COMBINADO DE GPS Y COMUNICACIONES QUE DISPONEN DE CIRCUITOS COMPARTIDOS. EL SISTEMA INCLUYE UNA ANTENA QUE RECIBE LOS DATOS REPRESENTATIVOS DE LAS SEÑALES GPS, UN CONVERTIDOR DE FRECUENCIA ACOPLADO A LA ANTENA, UN SINTETIZADOR DE FRECUENCIA ACOPLADO AL CONVERTIDOR DE FRECUENCIA, UN CONVERTIDOR ANALOGICO-DIGITAL ACOPLADO AL CONVERTIDOR DE FRECUENCIA Y UN PROCESADOR ACOPLADO TAMBIEN AL CONVERTIDOR DE FRECUENCIA. EL PROCESADOR TRATA LOS DATOS REPRESENTATIVOS DE LAS SEÑALES GPS PARA DETERMINAR UN PSEUDORANGO. EL RECEPTOR DE COMUNICACIONES INTEGRADO INCLUYE AL MENOS UN COMPONENTE COMPARTIDO ENTRE LOS SIGUIENTES: ANTENA, CONVERTIDOR DE FRECUENCIA, SINTETIZADOR DE FRECUENCIA Y CONVERTIDOR ANALOGICO-DIGITAL. DE FORMA TIPICA, EN ALGUNAS DE LAS REALIZACIONES EL PROCESADOR TAMBIEN EFECTUA LA DEMODULACION DE LAS SEÑALES DE COMUNICACIONES RECIBIDAS ASI COMO EL CONTROL DE LA MODULACION DE LOS DATOS A TRANSMITIR COMO SEÑAL A TRAVES DEL ENLACE DE COMUNICACIONES.
RECEPTOR GPS Y METODO PARA EL PROCESAMIENTO DE SEÑALES GPS.
(01/09/2003) UN RECEPTOR DE SISTEMA DE POSICIONAMIENTO GLOBAL (GPS) TIENE UN PRIMER GRUPO DE CIRCUITOS PARA RECIBIR Y PROCESAR SECUENCIAS PSEUDOALEATORIAS TRANSMITIDAS POR DIVERSOS SATELITES GPS. EL PRIMER GRUPO DE CIRCUITOS ESTA CONFIGURADO PARA EJECUTAR OPERACIONES DE CORRELACION CONVENCIONALES SOBRE LAS SECUENCIAS PSEUDOALEATORIAS RECIBIDAS PARA DETERMINAR LAS PSEUDOGAMAS DESDE EL RECEPTOR GPS HASTA LOS SATELITES GPS. EL RECEPTOR GPS INCLUYE TAMBIEN UN SEGUNDO GRUPO DE CIRCUITOS ACOPLADO AL PRIMER GRUPO DE CIRCUITOS. EL SEGUNDO GRUPO DE CIRCUITOS ESTA CONFIGURADO PARA RECIBIR Y PROCESAR LAS SECUENCIAS PSEUDOALEATORIAS EN CONDICIONES DE BLOQUEO. EL SEGUNDO GRUPO DE CIRCUITOS PROCESA LAS SECUENCIAS PSEUDOALEATORIAS DIGITALIZANDO Y ALMACENANDO UNA LONGITUD DE REGISTRO PREDETERMINADA DE LAS SECUENCIAS RECIBIDAS Y EJECUTANDO DESPUES…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}