9 inventos, patentes y modelos de JAHKONEN, PEKKA
(11/12/2019) Sistema transportador que comprende una identificación de la presencia de una carga de un transportador;
cuyo sistema transportador comprende un motor eléctrico para mover el transportador, y también un dispositivo de suministro de energía para suministrar energía entre el motor eléctrico y una fuente de corriente alterna del sistema transportador;
cuyo aparato de suministro de energía comprende un inversor, que comprende un puente rectificador conectado a la fuente de corriente alterna y también un puente del motor conectado al motor eléctrico ;
y cuyo sistema transportador comprende medios para determinar la tensión de la fuente de corriente alterna;
caracterizado por que en dos modos operativos, en particular el modo inactivo…
Control de ascensor con respecto a los rellanos.
(06/06/2012) Método de control de ascensor, en el que el motor de un ascensor es controlado de tal manera que la velocidaddel ascensor sigue una velocidad de referencia, y que, cuando el ascensor está desacelerando, el motor escontrolado por un método de ajuste de velocidad durante la fase de desaceleración inicial y que el motor escontrolado mediante un método de ajuste de posición durante la fase de desaceleración final, caracterizado porqueel momento de transición entre el ajuste de velocidad y el ajuste de posición se determina sustancialmente pormedio de la curva de velocidad del ascensor.
(20/04/2011) Sistema de ascensores, cuyo sistema de ascensores comprende al menos dos ascensores sin contrapeso para mover personas y/o mercancías, comprendiendo cada uno de dichos ascensores sin contrapeso una unidad convertidora de energía, un motor de ascensor, una polea de tracción , un conjunto de cables de elevación, y una cabina de ascensor más medios para almacenar energía mecánica y para descargar una disposición de almacenamiento de energía, por lo que los medios para almacenar energía mecánica y para descargar una disposición de almacenamiento de energía comprenden un ascensor con peso , comprendiendo dicho ascensor…
ACCIONAMIENTO DE MOTOR ELECTRICO.
(16/01/2009) Accionamiento de motor eléctrico para accionar un motor de corriente alterna , comprendiendo dicho accionamiento de motor eléctrico un convertidor de frecuencia para controlar el motor, cuyo convertidor de frecuencia comprende un rectificador y un inversor incorporados en la práctica mediante el uso de interruptores semiconductores dispuestos en un puente, consistiendo el inversor en dos puentes para la alimentación de voltaje positivo y negativo al motor eléctrico, y un circuito intermedio entre el rectificador y el inversor, comprendiendo dicho circuito intermedio un condensador (23a, 63a) y una unidad de inductores prevista en la…
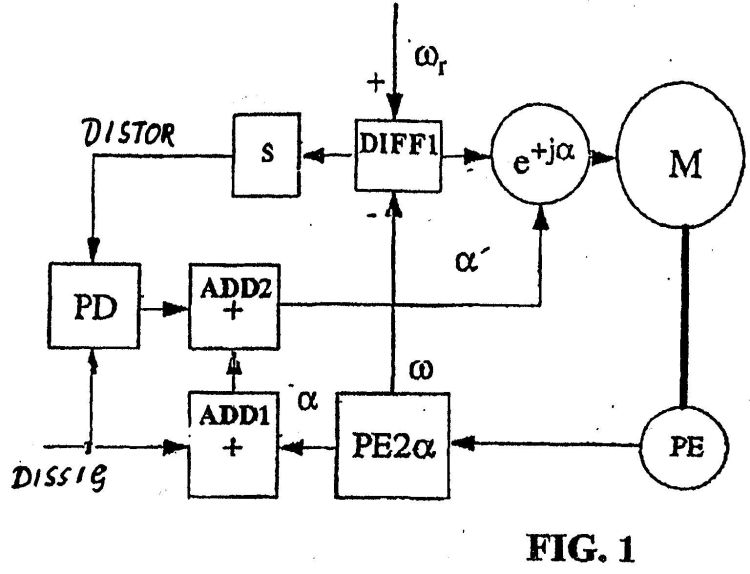
METODO Y APARATO PARA LA REGULACION DEL ANGULO DEL ROTOR DE UN MOTOR DE ASCENSOR.
Secciones de la CIP Electricidad Física Técnicas industriales diversas y transportes
(16/03/2008). Ver ilustración. Solicitante/s: KONE CORPORATION. Clasificación: H02P6/18, H02P6/16, H02P6/08, G05B19/29, B66B1/30, H02P25/02.
Método para la regulación del ángulo del rotor de un motor síncrono (M) de ascensor, en cuyo método: se miden datos (?) de realimentación del ángulo del rotor por medio de un emisor de impulsos (PE) o un tacómetro conectado al motor del ascensor, cuyos datos (?) de realimentación del ángulo del rotor se utilizan para obtener una señal (?'') de control de regulación para regular el ángulo del rotor del motor, caracterizado porque una señal de perturbación (DISSIG) se suma a los datos (?) de realimentación del ángulo del rotor, a fin de obtener la señal (?'') de control de la regulación, cuya adición conduce a un cambio del ángulo del rotor y del par del motor, cuyo cambio es medido (DIFF1, S) como una señal de cambio (DISTOR), cuya señal de cambio (DISTOR) se compara (PD) con la señal de perturbación (DISSIG) y, sobre la base de la comparación (PD), se obtiene una señal de control para regular el ángulo del rotor.
Sección de la CIP Técnicas industriales diversas y transportes
(01/12/2007). Ver ilustración. Solicitante/s: KONE CORPORATION. Clasificación: B66B1/30.
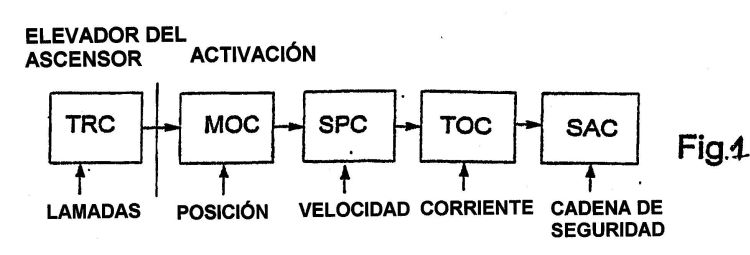
Un método para controlar un ascensor que no cambia el sentido del par de torsión, tal como un ascensor sin contrapeso, cuyo ascensor tiene un motor eléctrico (M1) de corriente alterna, tal como un motor de imanes permanentes o un motor asíncrono, y una sección (ACTIVACIÓN1) de activación del motor para controlar el motor y una sección (ECO1) de control del ascensor, utilizada para controlar el funcionamiento del ascensor, y en el que se proporcionan canales de control entre la sección de control del ascensor y la sección de activación del motor, para la transmisión de señales de control, caracterizado porque para controlar el motor, solamente se hacen pasar señales de control de posición y de par entre la sección de control del ascensor y la de activación del motor.
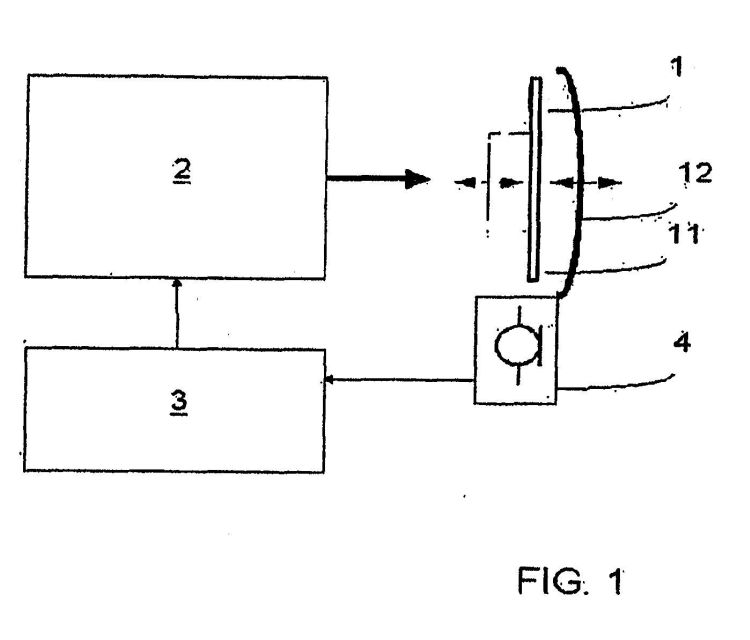
METODO Y APARATO PARA DETERMINAR LA POSICION DEL ROTOR DE UN MOTOR DE ASCENSOR.
Secciones de la CIP Técnicas industriales diversas y transportes Electricidad
(16/11/2007). Ver ilustración. Solicitante/s: KONE CORPORATION. Clasificación: B66B1/34, B66B11/04, H02P6/18, H02P6/16, B66B1/30.
Un método para determinar la posición del rotor de un motor síncrono utilizado como motor de ascensor, en cuyo método: se alimenta una corriente alterna o un voltaje de cierta frecuencia al estator del motor, y se mide una magnitud generada por la corriente alterna o el voltaje y se la utiliza para determinar la posición del rotor, caracterizado porque, en el método, se mide la vibración de la máquina en función del ángulo del rotor, y se determina la posición del rotor utilizando la mencionada vibración.
METODO PARA CONTROLAR UN MOTOR DE CORRIENTE REGULADA.
(01/06/2005) Método para controlar un motor síncrono de corriente alterna, de imanes permanentes, para accionar un ascensor, alimentado a partir de una fuente de corriente alterna de corriente controlada, por lo que el control de corriente se realiza utilizando técnicas analógicas mientras que el control de la velocidad y del par se consigue haciendo uso de un microcontrolador por aplicación de un control vectorial trifásico y utilizando coordenadas d y q del motor que pueden obtenerse a partir de datos de realimentación del ángulo del rotor que está sincronizado con las posiciones de los imanes permanentes del rotor, en cuyo método, se regula el par del motor por medio de una referencia de corriente, y en el que con el fin de compensar el efecto de los…
PROCEDIMIENTO PARA DETERMINAR LOS PARAMETROS PARA UN ACCIONAMIENTO ELECTRICO QUE CONTROLA UN MOTOR SINCRONO DE ASCENSOR CON IMANES PERMANENTES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/09/2002). Ver ilustración. Solicitante/s: KONE CORPORATION. Clasificación: B66B1/30.
SE DESCRIBE UN PROCEDIMIENTO PARA DETERMINAR LOS PARAMETROS DE UN ACCIONAMIENTO ELECTRICO QUE CONTROLA UN MOTOR SINCRONO DE ASCENSOR CON IMANES PERMANENTES, UN ORDENADOR QUE CONTROLA EL FUNCIONAMIENTO DEL ACCIONAMIENTO ELECTRICO, DOTADO DE UN MODELO DE CONTROL QUE DESCRIBE EL ASCENSOR Y QUE CONTIENE PARAMETROS AJUSTABLES. LA CABINA DEL ASCENSOR, INSTALADA EN EL POZO DEL ASCENSOR, PUEDE ENTRAR EN UNA CONDICION DE MOVIMIENTO PRODUCIDO POR LA DIFERENCIA EN EL EQUILIBRIO ENTRE LAS MASAS DEL ASCENSOR; CON EL USO DE DOS CARGAS DIFERENTES CONECTADAS A LOS TERMINALES DEL MOTOR SINCRONO, SE MIDEN LA VELOCIDAD DE ROTACION, LA FUERZA ELECTROMOTRIZ Y LA REACTANCIA SINCRONA DEL MOTOR SINCRONO MIENTRAS LA CABINA DEL ASCENSOR ESTA EN ESTADO DE MOVIMIENTO CONSTANTE, Y LA RESISTENCIA DEL ESTATOR SE MIDE A TRAVES DE UNA MEDICION SEPARADA, CALCULANDOSE Y OBTENIENDOSE A PARTIR DE ESTAS MEDICIONES UN MODELO DE CONTROL QUE DESCRIBE EL ASCENSOR.
{kind=link}
{kind=link}
{kind=link}
{kind=link}