6 inventos, patentes y modelos de HOFFSOMMER, KLAUS
DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DE LA ZONA CERCANA DE UN VEHÍCULO AUTOMÓVIL PARA EVITAR COLISIONES CON OBSTÁCULOS, ESPECIALMENTE AL APARCAR.
(28/12/2011) Dispositivo de vigilancia de la zona cercana de un vehículo automóvil para evitar colisiones con obstáculos , cuyo dispositivo comprende al menos un sensor de distancia previsto en la zona de un flanco lateral del vehículo automóvil para vigilar obstáculos laterales, un sensor de ángulo de conducción y un sensor de recorrido para captar un trayecto recorrido, y una unidad de ordenador para procesar valores de sensor captados y otras informaciones, estando previsto un equipo de aviso por medio del cual se genera una señal de aviso acústica y/u óptica al presentarse un riesgo de colisión, caracterizado porque el equipo de aviso está concebido para indicar cuáles de las puertas del vehículo automóvil no podrán ser abiertas en vista de una distancia demasiado pequeño de las…
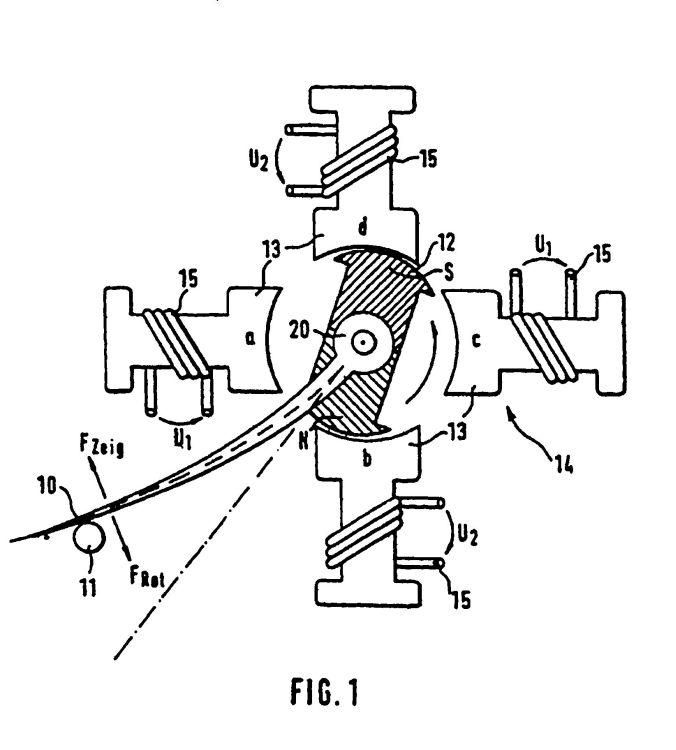
PROCEDIMIENTO PARA LA REDUCCION DE LA MAGNITUD DE UN MOVIMIENTO INCONTROLADO DE UN INDICADOR.
Secciones de la CIP Electricidad Física
(01/07/2007). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Clasificación: H02P8/00, G01D13/22, G05B19/4061, H02P8/32, G01R7/06, G01D11/10, G01D11/14, H02P8/28.
Procedimiento para la reducción de la magnitud de un movimiento incontrolado de un indicador accionado de forma giratoria por un motor paso a paso a través de su rotor y que se apoya en un tope mecánico durante la desconexión del motor paso a paso , caracterizado porque antes de la desconexión del motor paso a paso se toman medidas, que reducen un rebote del indicador desde el tope , de tal manera que se reduce la intensidad de campo del campo magnético del motor paso a paso , que actúa sobre el rotor del motor paso a paso , a un valor más reducido o porque el indicador antes de la desconexión se mueve fuera del tope en la medida de un ángulo de giro de compensación (Ap) predeterminado o porque el motor paso a paso después de la desconexión se conecta de nuevo al menos una vez después de un periodo de tiempo de desconexión (ta1, ta2, ta3) predeterminado durante un periodo de tiempo de conexión (te1, te2, te3) predeterminado.
PROCEDIMIENTO PARA LA IDENTIFICACION DE UNA UNIDAD ELECTRONICA.
Secciones de la CIP Física Electricidad
(01/03/2007). Ver ilustración. Solicitante/s: VALEO SCHALTER UND SENSOREN GMBH. Clasificación: G06F12/06, H04L12/403.
Procedimiento para la identificación de por lo menos una unidad electrónica en un sistema electrónico, en el cual se emplea para la identificación un nivel de una tensión tomada de la por lo menos una unidad electrónica en una línea de alimentación (UBAT), caracterizado porque la por lo menos una unidad electrónica del sistema electrónico intenta para la identificación igualar el nivel en una línea de bus al nivel de la tensión tomada, diferente a lo largo de la línea de alimentación (UBAT).
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE UN VEHICULO.
(16/11/2006) Procedimiento para el control de un vehículo, en particular un automóvil, que comprende los siguientes tres pasos: - Registro de la distancia del vehículo respecto a un obstáculo en diferentes instantes de tiempo (S1); - Comprobación de si la velocidad del vehículo VVeh es menor que una velocidad de paso que se puede prefijar y/o de si la distancia a está por debajo de un valor umbral de distancia a1 predeterminado (S2-S6); y - Modificación de la velocidad del vehículo VVeh conforme a la magnitud de la distancia y/ o por medio de la entrega de una indicación al conductor conforme a la magnitud de la distancia (S7-S12), cuando se cumpla al menos uno de los criterios de comprobación en el paso de comprobación previo, caracterizado porque la modificación de la velocidad del vehículo se lleva a cabo como consecuencia de este procedimiento…
Secciones de la CIP Física Electricidad
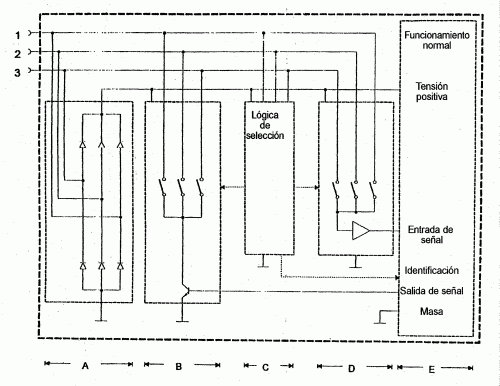
(16/09/2006). Ver ilustración. Solicitante/s: VALEO SCHALTER UND SENSOREN GMBH. Clasificación: G06F12/06, H04L12/40.
Componente de circuito electrónico (A, B, C, D) para la codificación de un usuario del bus (Xa, Xb, Xc, Xd, Xe, Xf, E) asignado a él de un sistema de bus, caracterizado porque el componente de circuito (A, B, C, D) se puede unir en diferentes combinaciones de conexión con al menos dos líneas de conexión (P, G, S, S_a, S_b) conformadas como líneas de suministro (P, G) y/o líneas de señal (S, S_a, S_b), y porque el componente de circuito (A, B, C, D) contiene medios para reconocer la combinación de conexiones respectivas de las líneas de conexión (P, G, S, S_a, S_b) conectadas, y para codificar el usuario del bus (X, Xb, Xc, Xd, Xe, Xf, E) asignado a él en función de la combinación de conexiones reconocida.
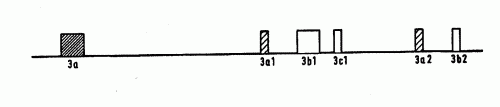
SISTEMA DE MEDICION DE DISTANCIAS POR ULTRASONIDO CON SEÑALES DIGITALES DE MEDICION TRANSMITIDAS POR MULTIPLEXION DE TIEMPO.
Sección de la CIP Física
(16/01/2002). Ver ilustración. Solicitante/s: ITT MANUFACTURING ENTERPRISES, INC.. Clasificación: G01S15/10, G01S15/93.
LA INVENCION SE REFIERE A UN SISTEMA DE MEDICION DE DISTANCIAS, ESPECIALMENTE UN SISTEMA PARA ESTACIONAMIENTO ASISTIDO DE AUTOMOVILES, POR EL QUE LA INFORMACION (1A, 1B, 1C Y 2A, 2B) QUE DEBE TRANSMITIRSE AL SISTEMA UNICO DE CONTROL POR PARTE DE LOS SENSORES SE COMPRIME EN EL TIEMPO. ESTO HACE POSIBLE INTERPRETAR VARIAS VECES EL IMPULSO DEL MISMO ECO O TRANSMITIR INFORMACION CON MAYOR SEGURIDAD POR MEDIO DE CODIFICACION DIFERENTE DE LA MISMA INFORMACION EN LA LINEA DE DATOS. EXISTE TAMBIEN LA POSIBILIDAD DE CONECTAR UNA SERIE DE DIVERSOS SENSORES A LA MISMA LINEA DE DATOS, DE MANERA QUE NO SE NECESITE YA UNA CONEXION EN FORMA DE TRIANGULO DE LOS SENSORES AL DISPOSITIVO DE CONTROL, POR MEDIO DE UN NUMERO CORRESPONDIENTE DE LINEAS DE DATOS.
{kind=link}
{kind=link}
{kind=link}
{kind=link}