85 inventos, patentes y modelos de GOVARI, ASSAF
Plantilla de calibración para una almohadilla de localización plana.
(26/02/2020) Un aparato que comprende:
un conjunto de detector , que comprende una matriz de múltiples detectores de campo magnético (230A);
una matriz de registro de múltiples marcadores de referencia de imágenes de resonancia magnética (MRI) ;
una unidad de posicionamiento , que está configurada para fijar el conjunto de detector en una o más posiciones conocidas en relación con una almohadilla de localización que genera campos magnéticos para realizar mediciones de posición en un detector de campo magnético intracorporal usando un sistema de posicionamiento;
circuitería de interfaz, que está configurada para emitir señales eléctricas producidas por los detectores de campo magnético del conjunto de detector cuando el conjunto de detector…
Bobinas formadas en lámina de nitinol plegada.
Sección de la CIP Necesidades corrientes de la vida
(25/12/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14.
Un aparato que comprende:
un tubo de inserción flexible, que tiene una parte proximal y una parte distal para la inserción en la cavidad corporal de un paciente; y
un miembro elástico, que acopla la parte proximal del tubo de inserción a la parte distal, en donde el miembro elástico comprende material elástico de configuración de la forma, el miembro elástico teniendo extensiones proximales y distales en contacto con la parte proximal y la parte distal del tubo de inserción, respectivamente,
en donde una fuerza aplicada a través de la parte distal produce una deformación del miembro elástico que se correlaciona con un desplazamiento de la parte proximal con respecto a la parte distal.
PDF original: ES-2774655_T3.pdf
Sensor de fuerza de tamaño reducido.
(11/12/2019) Un aparato, que comprende:
una sonda flexible que tiene una porción proximal y un extremo distal, la sonda adaptada para la inserción en una cavidad corporal de un sujeto vivo, la sonda tiene una punta distal en el extremo distal de la sonda; y
un conjunto en el extremo distal de la sonda, que comprende:
un transmisor ; y
un receptor que recibe señales del transmisor para detectar una posición del receptor con respecto al transmisor;
caracterizado por espiras primera y segunda planas dispuestas entre el transmisor y el receptor, un retenedor del transmisor , un retenedor del receptor y un separador , en donde el retenedor del transmisor y el retenedor del receptor…
Electrodo de catéter con múltiples termopares.
(13/11/2019) Una sonda médica , que comprende:
un cuerpo alargado para su inserción en un órgano de un paciente;
un electrodo que comprende un cuerpo de electrodo , que está unido al cuerpo alargado de la sonda ; múltiples termopares , que están dispuestos en diferentes localizaciones respectivas del electrodo, y que están configurados para detectar las temperaturas respectivas en las localizaciones; y
un primer conductor que está conectado directamente en serie con los termopares para proporcionar un conductor que sea común a los termopares , y múltiples segundos conductores que están cada uno conectados a uno de los termopares respectivos, en donde los potenciales eléctricos entre el primer conductor y los…
Instrumento médico que contiene un sensor de rastreo con un núcleo de polvo de ferrita.
Secciones de la CIP Necesidades corrientes de la vida Electricidad
(30/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61M25/09, H01F41/02, H01F27/255, H01F1/22, A61B90/00, A61B34/20.
Un equipo o aparato, que comprende:
un instrumento médico; y
al menos un sensor de rastreo que está situado en la porción distal del instrumento, de manera que el sensor comprende:
un núcleo de ferrita rígido que comprende un tubo que contiene polvo de ferrita, y
una bobina que está enrollada alrededor del tubo,
de manera que el polvo de ferrita se comprime dentro del tubo.
PDF original: ES-2767279_T3.pdf
Procedimientos para la construcción de un catéter de globo irrigado con ensamblaje de electrodo de circuito flexible.
(23/10/2019) Un procedimiento para construir un catéter de electrofisiología adaptado para su uso en un ostium , el catéter que tiene un globo que tiene una membrana y un conjunto de electrodo de circuito flexible , el procedimiento comprende:
proporcionar un circuito flexible que tiene un sustrato , una primera capa conductora y una segunda capa conductora ;
retirar la primera capa conductora para exponer una primera superficie del sustrato ;
formar el electrodo de cableado en la segunda capa conductora con una zona de exclusión;
formar un primer orificio pasante en el sustrato para proporcionar una vía conductora y formar un segundo orificio pasante para proporcionar una abertura de riego en alineación con la zona de exclusión; formar el electrodo de contacto en la…
Uso de sensor de fuerza para proporcionar ángulo de haz de ultrasonidos.
(16/10/2019) Un aparato que comprende:
una sonda flexible que tiene una parte proximal y un extremo distal para su inserción en una cavidad corporal de un paciente, la sonda teniendo una punta distal en el extremo distal de la sonda;
un transmisor dentro de la sonda;
un sensor de posición dentro de la sonda que recibe señales del transmisor para detectar una posición de la punta distal con respecto al extremo distal de la sonda;
un sensor de fuerza de contacto elástico dispuesto en la sonda entre el transmisor y el sensor de posición, que acopla la punta distal con el extremo distal de la sonda y está configurado para deformarse en respuesta a la presión ejercida sobre la…
Mecanismo de engranaje para impulsar un eje oscilante.
(16/10/2019) Un dispositivo de corte que está adaptado para los senos o la nariz, y que comprende:
una funda o cubierta alargada que tiene una sección distal , un canal o conducto, una pared interior y un puerto o abertura en la sección distal, de manera que el puerto está conectado a una fuente de vacío;
un eje giratorio -también denominado 'eje de rotación' o 'varilla rotatoria'- que está situado en el conducto de la funda, de manera que el eje tiene un eje de simetría, un extremo distal y un extremo proximal;
una cuchilla de corte que está situada en el extremo distal del eje y enfrente del puerto, de manera que la cuchilla tiene dos filos cortantes ;
una estructura de engranaje(s) que funciona haciendo girar alternativamente el eje en…
Catéter de cesta con electrodo de campo lejano.
(16/10/2019) Un aparato para obtener electrogramas cardíacos que comprende:
un catéter que tiene un cuerpo de catéter alargado , teniendo el cuerpo del catéter un interior, un extremo proximal, un extremo distal y al menos un lumen a su través;
un conjunto en forma de cesta en el extremo distal del cuerpo del catéter, teniendo el conjunto en forma de cesta un eje longitudinal, una extremidad proximal y una extremidad distal y comprendiendo una pluralidad de estrías conectadas en la extremidad proximal y la extremidad distal, comprendiendo las estrías una pluralidad de electrodos de estrías , el conjunto en forma de cesta configurable en una disposición expandida en la que las estrías se arquean…
Generadores de campos magnéticos usando bobinas no concéntricas.
Secciones de la CIP Electricidad Necesidades corrientes de la vida
(09/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: H01F27/28, A61B5/06, A61B6/00, A61B90/00, A61B34/20.
Un generador de campo, que comprende tres bobinas planas que están dispuestas en un único plano, en donde por lo menos dos de las bobinas no son concéntricas y están enrolladas alrededor de los ejes respectivos que no son paralelos entre sí, para generar campos magnéticos respectivos que no son paralelos entre sí,
y caracterizado porque las por lo menos dos bobinas no concéntricas están dispuestas una al lado de la otra en el único plano, y en donde la tercera bobina está localizada alrededor de las por lo menos dos bobinas no concéntricas.
PDF original: ES-2764397_T3.pdf
Estimar la temperatura durante una ablación.
(25/09/2019) Un equipo o aparato, que comprende:
una interfaz eléctrica; y
un procesador, que está configurado:
para recibir -a través de la interfaz eléctrica- una temperatura detectada por un sensor de temperatura situado en el extremo distal de una sonda intracorporal,
para estimar o calcular la temperatura del tejido de un sujeto basándose en la temperatura detectada y un parámetro de una corriente de ablación dirigida hacia el tejido por un electrodo de ablación situado en el extremo distal de la sonda intracorporal, de manera que el procesador está configurado para estimar la temperatura del tejido:
escogiendo o seleccionando un coeficiente en respuesta al parámetro, y
multiplicando -por el coeficiente- un valor que está basado en la temperatura detectada, y
…
Manejo sin contacto de estación de trabajo del instrumento de ablación mediante el uso de sensores de profundidad.
(25/09/2019) Un sistema para el manejo sin contacto de una estación de trabajo del instrumento de ablación que comprende:
un sensor de profundidad para detectar un movimiento;
un módulo de software de movimiento operable para recibir el movimiento detectado desde el sensor de profundidad , deducir un gesto en base al movimiento detectado; y
un módulo de software de cliente operable para recibir el gesto aplicable en un ordenador cliente en la estación de trabajo del instrumento de ablación para realizar una tarea de acuerdo con la lógica del cliente en base al gesto aplicable,
caracterizado porque el módulo de software de cliente es operable para permitir que un usuario específico controle dicha tarea…
Corrección de una imagen de tomografía computarizada.
(04/09/2019) Un equipo o aparato, que comprende:
una sonda médica que está configurada para introducirse en una cavidad corporal;
un sensor de ubicación que está situado en la sonda médica y funciona u opera en un sistema de coordenadas del sensor; y
un procesador que está configurado:
para recibir de un sistema de imagen -que opera en un sistema de coordenadas de imagen- una imagen tridimensional de la cavidad corporal que incluye un espacio abierto y tejido corporal;
para recibir de la sonda médica una señal que indica la ubicación de la punta distal de la sonda médica;
para combinar o sincronizar el sistema de coordenadas de la imagen y el sistema de coordenadas del sensor a fin de identificar uno o más vóxeles…
Rastreador de red para vigilancia y diagnóstico del sistema.
Secciones de la CIP Necesidades corrientes de la vida Electricidad
(28/08/2019). Ver ilustración. Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61B17/00, H04L12/26, A61B18/18, A61B34/20.
Un método para su uso en un sistema médico, comprendiendo el método:
recibir señales analógicas de uno o más componentes del sistema médico a través de una interfaz de entrada / salida (E / S);
convertir las señales analógicas en señales digitales para formar señales procesadas;
monitorizar un bus del sistema para uno o más paquetes recibidos a través de una primera interfaz, en donde el uno o más paquetes comprenden las señales procesadas del uno o más componentes del sistema médico;
identificar un origen del uno o más paquetes;
monitorizar los intervalos de tiempo entre uno o más paquetes para determinar el estado de conexión de uno o más componentes;
analizar cada uno de los uno o más paquetes en un encabezado de paquete y datos;
inspeccionar los datos en busca de errores;
transmitir una indicación del estado de la conexión y una indicación de errores a una pantalla a través de una segunda interfaz.
PDF original: ES-2755353_T3.pdf
Guía de navegación para la sinuplastia.
Sección de la CIP Necesidades corrientes de la vida
(21/08/2019). Solicitante/s: Acclarent, Inc. . Clasificación: A61M25/09, A61B17/24.
Aparato , que comprende,
un alambre guía que tiene un extremo distal , configurado para insertarse en proximidad con un seno nasal de un paciente, teniendo el alambre guía una luz ;
una fibra óptica , que atraviesa la luz, configurada para iluminar el extremo distal;
una bobina , ubicada en el extremo distal, configurada para generar una señal en respuesta a un campo magnético que interactúa con la bobina; y
un procesador , configurado para recibir la señal y evaluar una ubicación del extremo distal en respuesta a la señal,
caracterizado por que la bobina se enrolla alrededor de la fibra óptica y se encuentra dentro de la luz.
PDF original: ES-2751274_T3.pdf
Catéter con detección de contacto óptica.
Sección de la CIP Necesidades corrientes de la vida
(21/08/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B1/00, A61B18/14, A61M25/00, A61B5/00.
Una sonda médica , que comprende:
una vaina o funda biocompatible que tiene un extremo proximal y un extremo distal , y que tiene múltiples ventanas transparentes y paralelas que son transparentes a la radiación óptica y están situadas entre el extremo proximal y el extremo distal; y
múltiples elementos o componentes funcionales correspondientes a las múltiples ventanas transparentes y situados en la funda biocompatible,
de manera que cada uno de los elementos funcionales comprende un sensor de contacto óptico que tiene un emisor óptico , y un detector óptico que está muy próximo al emisor óptico; y
de manera que los múltiples sensores de contacto ópticos están situados de forma no simétrica respecto a sus ventanas.
PDF original: ES-2752018_T3.pdf
Estado de una bomba de irrigación.
Sección de la CIP Necesidades corrientes de la vida
(21/08/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61M3/02, A61M5/152.
Una bomba que comprende:
un compartimento de compresión configurado para recibir, entre el primer y el segundo lados (78A, 76A) del compartimento, un recipiente flexible que contiene un fluido y que tiene una salida ;
un mecanismo de bomba acoplado para conducir el primer y el segundo lados del compartimento juntos para forzar el fluido fuera del recipiente a través de la salida;
el primer y el segundo electrodos fijados respectivamente a el primer y el segundo lados; y
un procesador acoplado al primer y el segundo electrodos y configurado para medir una capacitancia entre el primer y el segundo electrodos y para estimar, en respuesta a la capacitancia, un volumen del fluido que queda en el recipiente.
PDF original: ES-2751002_T3.pdf
Cables guía que tienen resistencia mecánica y protección electromagnética mejoradas.
Sección de la CIP Necesidades corrientes de la vida
(14/08/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B5/00, A61M25/09, A61B5/06.
Una guía médica , que comprende:
una bobina espiral flexible , que está configurada para guiar un dispositivo médico dentro del cuerpo de un paciente;
una fibra, que se extiende a lo largo de por lo menos parte de la bobina, y está acoplada a una superficie interior de por lo menos parte de la bobina en una o más primeras localizaciones predefinidas y está configurada para reforzar mecánicamente por lo menos parte de la bobina; y
un elemento de refuerzo , que está acoplado a uno o más segundas localizaciones predefinidas a lo largo de una sección distal de la bobina, y que está configurado para reforzar mecánicamente la sección distal.
PDF original: ES-2751073_T3.pdf
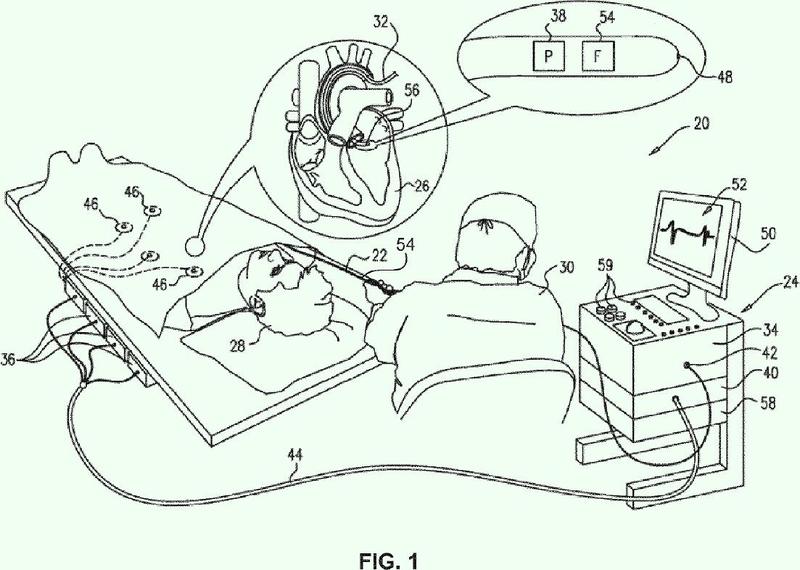
Evaluación del contacto basada en la medición de fases.
(17/07/2019) Un equipo o aparato de ablación , que comprende:
un catéter flexible que está adaptado para introducirse en el corazón de un sujeto vivo, de manera que el catéter flexible tiene un electrodo de ablación dispuesto distalmente que entra en contacto con un tejido diana del corazón y un electrodo de referencia ;
un ablacionador -también denominado 'ablador' o 'dispositivo de ablación'- , que aplica una dosis de energía al tejido diana para ablacionarlo;
un subsistema de medición de la impedancia, que comprende un electrodo de superficie corporal que ha de fijarse al sujeto, y que tiene un primer sistema de circuitos para hacer pasar una corriente eléctrica entre el electrodo de superficie corporal y el electrodo de ablación, y un segundo sistema de circuitos para determinar la(s) fase(s) de la corriente eléctrica;
un tercer…
Detección de estallido de vapor.
(17/07/2019) Aparatos médicos, que comprenden:
una sonda alargada configurada para su inserción en el cuerpo de un paciente, comprendiendo la sonda un elemento de ablación y un transductor acústico dispuesto en un extremo distal de la sonda;
un conjunto de sensores acústicos configurados para colocarse sobre el cuerpo del paciente; y
una unidad de control , que está configurada, mientras que el extremo distal de la sonda se coloca en una ubicación objetivo en el cuerpo, para conducir el transductor acústico en una fase de entrenamiento para emitir una señal acústica, para recibir señales eléctricas de los sensores acústicos en respuesta a la señal acústica, y procesar las señales eléctricas…
Catéter con múltiples electrodos irrigados y un sensor de fuerza.
Sección de la CIP Necesidades corrientes de la vida
(19/06/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61B90/00.
Una sonda , que comprende:
un tubo de inserción ;
un electrodo que está montado en el extremo distal del tubo de inserción ;
un sensor de fuerza que está montado en el extremo distal , de manera que el sensor de fuerza tiene una abertura central y está diseñado para medir la fuerza en el extremo distal ; y
un tubo -o tubería- que pasa a través de la abertura central y está diseñado para suministrar fluido de irrigación a través de las aberturas del electrodo ;
que se caracteriza por el hecho de que el sensor de fuerza comprende al menos una bobina transductora magnética , de manera que el tubo se dirige o encamina a través de la -al menos unabobina.
PDF original: ES-2745007_T3.pdf
Ablación de corta duración con temperatura controlada.
(05/06/2019) Un aparato, que comprende:
un electrodo (24A);
un módulo de control de potencia configurado para seleccionar una primera potencia de radiofrecuencia (RF) máxima a ser suministrada por el electrodo (24A) dentro de un intervalo de 70W-100W y para seleccionar una segunda potencia de RF máxima a ser suministrada por el electrodo (24A) dentro de un intervalo de 20W-60W; y
un procesador acoplado al módulo de control de potencia y configurado para:
seleccionar una fuerza permisible en el electrodo (24A) dentro de un intervalo de 5 g-50 g;
seleccionar una temperatura permisible máxima, del tejido a someter a ablación, dentro de un intervalo de 55º C-65º C;
seleccionar una velocidad de irrigación para proporcionar fluido de irrigación al electrodo (24A) dentro de un intervalo de 8 a 45 ml/min; y
…
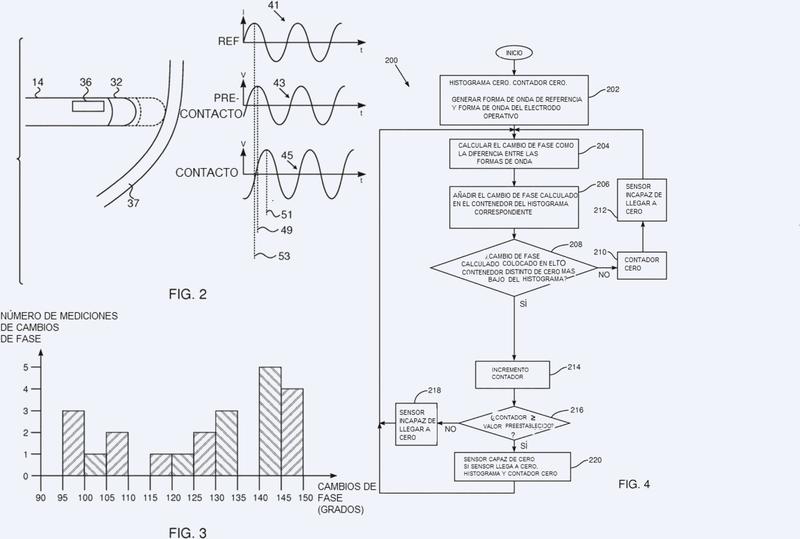
Determinación de ausencia de contacto para un catéter.
Sección de la CIP Necesidades corrientes de la vida
(29/05/2019). Ver ilustración. Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61B5/00, A61B18/00, A61B17/00, A61B5/053, A61B90/00.
Aparato, que comprende:
un catéter que comprende un electrodo y un sensor de fuerza configurado para medir una fuerza entre el catéter y el tejido cerca del catéter ; y
un procesador configurado para:
inyectar una corriente entre el electrodo y el tejido ,
medir una sucesión de cambios de fase de la corriente en relación con una referencia fija,
verificar que la cardinalidad de los cambios de fase medidos que caen dentro de un intervalo predeterminado de valores posibles de los cambios de fase aumenta durante un período de tiempo predeterminado, y
calibrar un punto de fuerza cero para el sensor de fuerza de acuerdo con la fuerza medida por el sensor de fuerza durante el período de tiempo predeterminado.
PDF original: ES-2734002_T3.pdf
Manejo -sin contacto táctil- de dispositivos usando sensores de profundidad.
(15/05/2019) Un sistema para el manejo o utilización sin contacto táctil ('touch free', en inglés) de un dispositivo de quirófano, que comprende:
un sensor de profundidad que proporciona un mapa de profundidad y detecta un movimiento;
un pedal;
un módulo de software de movimiento que está operativo y
recibe el movimiento detectado por el sensor de profundidad ,
deduce o infiere un gesto o expresión basándose en el movimiento detectado, y
filtra el gesto para escoger o aceptar un gesto aplicable, de manera que filtrar el gesto comprende descartar el gesto y considerarlo no aplicable si el movimiento no se ha realizado de manera conjunta con la activación del pedal, y descartar el gesto y considerarlo no aplicable si el movimiento detectado no lo realiza un usuario que está autorizado para utilizar el…
Control de la potencia de ablación basado en la fuerza de contacto.
(17/04/2019) Un equipo o aparato de ablación , que comprende:
un catéter flexible que está adaptado para introducirse en el corazón de un sujeto vivo y tiene un electrodo de ablación dispuesto distalmente que entra en contacto con un tejido diana del corazón;
un dispositivo de ablación , que aplica una dosis de energía al tejido diana con un nivel de potencia adecuado para ablacionar el tejido diana;
un procesador para predecir el tamaño de lesión de acuerdo con la relación entre una fuerza de contacto dada entre el electrodo de ablación y el tejido diana, una cantidad de energía en la corriente eléctrica y un intervalo de tiempo durante el que la corriente eléctrica se…
Catéter de ablación curvo preformado.
(11/04/2019) Un dispositivo médico , que comprende:
un tubo de inserción , que tiene un eje longitudinal y un extremo distal que está adaptado para introducirse a través de un conducto o vía corporal hasta una cavidad situada en el cuerpo de un paciente;
un electrodo que está situado en el extremo distal del tubo de inserción y está configurado para entrar en contacto con el tejido de la cavidad;
que se caracteriza por el hecho de que el dispositivo médico además incluye:
un miembro o componente elástico , que está contenido en el extremo distal del tubo de inserción y, cuando no está constreñido, está configurado para hacer que el extremo distal se doble y se aleje del eje longitudinal adoptando una forma curva y se enderece hacia el eje longitudinal cuando está sometido…
Sistema de ablación integrado utilizando catéter con múltiples lúmenes de irrigación.
Sección de la CIP Necesidades corrientes de la vida
(27/03/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14.
Un catéter que comprende:
un cuerpo alargado ;
una sección distal que tiene al menos un primer electrodo y un segundo electrodo, estando cada electrodo perforado para irrigación;
un mango de control proximal al cuerpo alargado ;
un primer tubo de irrigación configurado para transportar el fluido al primer electrodo para la exclusión del segundo electrodo; y
un segundo tubo de irrigación configurado para transportar fluido al segundo electrodo hasta la exclusión del primer electrodo.
PDF original: ES-2731599_T3.pdf
Bomba de irrigación accionada por presión.
Sección de la CIP Necesidades corrientes de la vida
(27/03/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61M3/02, A61M5/145.
Una bomba médica , que comprende:
el primer y el segundo compartimentos , que están configurados para aceptar el primer y el segundo recipientes de fluido respectivos a ser bombeado a un dispositivo médico;
una pala , que se encaja entre el primer y el segundo compartimentos; y
un módulo de control , que está configurado para impulsar la pala para alternar entre los primeros periodos de tiempo en los que la pala aplica presión al primer recipiente para bombear el fluido desde el mismo, y los segundos periodos de tiempo en los que la pala aplica la presión al segundo recipiente para bombear el fluido desde el mismo.
PDF original: ES-2724572_T3.pdf
Preparación de micro-electrodos.
Sección de la CIP Necesidades corrientes de la vida
(20/03/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B18/14, A61N1/05, A61B5/0408.
Un método, que comprende:
proporcionar un cable metálico que tiene un diámetro del cable y un extremo ;
colocar un conductor a una distancia del extremo del cable ;
crear una descarga eléctrica entre el conductor y el extremo , mientras se establece la distancia y un potencial eléctrico de la descarga, para crear una perla de un tamaño predefinido en el extremo ;
y
caracterizado por ensamblar el cable con la perla creada en una sonda invasiva , de tal manera que la perla se coloca en una superficie exterior de la sonda.
PDF original: ES-2724624_T3.pdf
Instrumento ''ENT'' rígido.
Sección de la CIP Necesidades corrientes de la vida
(13/03/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Clasificación: A61B17/24, A61B90/00, A61B34/20.
Un equipo o aparato 'ENT' -del inglés 'ENT (Ear, Nose and Throat) apparatus', también conocido como 'equipo de oído, nariz y garganta' o 'equipo ONG'- que se usa para llevar a cabo un procedimiento en los senos nasales, y que incluye:
un tubo o conducto rígido que rodea o envuelve un canal , diseñado para introducirse en una cavidad de un paciente humano ;
un surco o ranura formado en el extremo distal del conducto;
una bobina conductora de cableado aislante enrollada en la ranura; y
una funda o cubierta que cubre el conducto rígido, de manera que rodea o envuelve por completo la bobina conductora.
PDF original: ES-2719080_T3.pdf
Sensores de un solo eje para estructura central flexible.
(27/02/2019) Un equipo de sonda médico invasivo, que comprende:
una sonda flexible y alargada, que tiene un extremo distal que se introduce en el cuerpo de un sujeto;
diversas bobinas , de manera que dichas bobinas están fijadas en sus respectivos puntos diferentes en relación con una ubicación conocida de referencia situada en la mencionada sonda, y, cuando se someten a un campo magnético aplicado externamente, las mencionadas bobinas producen las respectivas señales en respuesta a las coordenadas de posición de este; y
un sistema de circuitos para procesar señales, que recibe dichas señales y las procesa para determinar…
Catéter con múltiples electrodos irrigados y un sensor de fuerza.
(08/02/2019) Una sonda , que comprende:
un tubo de inserción , un electrodo distal montado en el extremo distal del tubo de inserción ;
un sensor de fuerza montado en el extremo distal , teniendo el sensor de fuerza una abertura central y estando configurado para medir una fuerza en el extremo distal ;
un electrodo proximal montado proximal al sensor de fuerza ;
una primera tubería , que recorre desde un extremo proximal del tubo de inserción al extremo distal , pasando a través de la abertura central , y configurada para suministrar fluido de irrigación a través de aberturas en el electrodo distal ;
una segunda tubería , que recorre desde un extremo proximal del tubo de inserción , entrando…
{kind=link}
{kind=link}