BANCO DE ENSAYOS UNIVERSAL PARA LA EVALUACION DE ACTUADORES.
(23/10/2012) Banco de ensayos universal para la evaluación de actuadores.
Permite ensayar actuadores de ensayo de tipo lineal y rotacional, independientemente de que su accionamiento sea hidráulico, eléctrico, mecánico, térmico, etc. empleando un actuador antagónico . Permite reproducir de manera precisa condiciones reales de funcionamiento, tanto de tipo dinámico como ambiental. Dispone de un controlador para programar una función continua de fuerza en el actuador antagónico con precisión mediante control en lazo cerrado. Comprende un chasis con una base a la que están fijadas unas primeras barras sobre las que se desplazan bastidores a los que están fijados los actuadores , que accionan simultáneamente un eje central de rotación provisto de un transductor…
BRAZO MANIPULADOR DE CARGAS CON PARES DE ACTUACION REDUCIDOS.
(14/09/2012) Brazo manipulador de cargas con pares de actuación reducidos.
La patente describe un brazo manipulador (1, 1', 1'') de cargas con bajos pares de actuación, que comprende varios eslabones (6, 6', 6'', 10, 10', 10'') intermedios unidos entre sí por articulaciones (5, 5', 5'', 9, 9', 9''), donde el último eslabón (14, 14', 14'') está unido a una articulación activa (13, 13', 13''), comprendiendo un mecanismo de cuatro barras (11a, 11a', 11a'', 11b, 11b', 11b'', 12, 12', 12'', 15, 15', 15'') cuya barra de extremo (15, 15', 15''), que se proyecta hacia abajo en dirección vertical, tiene un punto de enganche al que se acopla la carga.
SISTEMA Y PROCEDIMIENTO DE CONTROL PARA MANIPULADORES.
(18/11/2011) Sistema y procedimiento de control para manipuladores.Basado en guantes dotados de sensores, que permite a un operario controlar cualquier manipulador con uno o más grados de libertad, coordinando su movimiento de acuerdo con la magnitud, dirección y sentido de la fuerza aplicada por el operario , ejercida sobre la estructura del manipulador o sobre la carga movilizada . Dicho sistema de control comprende al menos un guante dotado de sensores, un computador , un receptor inalámbrico y unos variadores de frecuencia . Cada guante posee en su zona dorsal un sistema de posicionamiento dactilar que mide la flexión y abducción de los cinco dedos, un sistema de posicionamiento…
DISPOSITIVO UTIL PARA LA GENERACION DE MAPAS DE CONTORNO Y SUS APLICACIONES.
(24/03/2010) Dispositivo útil para la generación de mapas de contorno y sus aplicaciones.
La presente invención describe un dispositivo útil para la generación de mapas de contorno que comprende un soporte abierto, cerrado o con cualquier forma, sobre el que sitúa una red de uno o más medidores de distancia puntuales dispuestos consecutivamente alrededor del perímetro de dicho soporte creando una zona o perímetro de medición cerrado y continuo. Este dispositivo puede acoplarse a un aparato, con o sin capacidad de movilidad, por ejemplo un robot manipulador de objetos, un robot detector de minas antipersonas, un sistema de direccionamiento de una persona ciega, un robot volador (como un quadrotor o helicóptero autónomo), etc
POSICIONADOR PLANO DE DOS GRADOS DE LIBERTAD CON ACTUADORES ESTATICOS Y CONFINADOS.
(16/03/2008) Posicionador plano de dos grados de libertad con actuadores estáticos y confinados.#El dispositivo objeto de la presente invención consiste en un sistema posicionador paralelo de dos grados de libertad con los actuadores estáticos y confinados que permite posicionamientos de un punto (conocido como punto efectivo) sobre un plano. El sistema dispone de dos actuadores que trabajan simultánea y conjuntamente (en paralelo) en el desplazamiento de dos articulaciones. Esta disposición permite utilizar actuadores de menor potencia que en los sistemas tradicionales y está indicado para trabajar con objetos explosivos o inflamables de manera que ante eventuales accidentes (explosiones)…
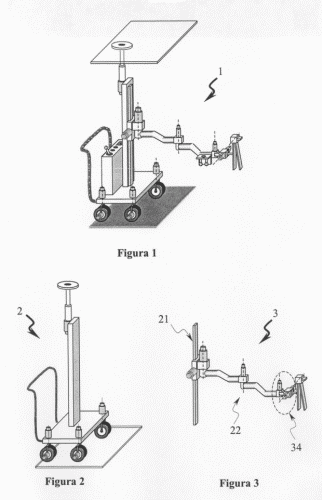
SISTEMA MOVIL DE MANIPULACION DE CARGAS MEDIANTE GUIADO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/07/2005). Ver ilustración. Solicitante/s: CONSEJO SUP. DE INVEST. CIENTIFICAS. Clasificación: B25J5/00.
Sistema de manipulación de cargas mediante guiado. Sistema móvil de manipulación que, guiado por un operario, asiste a éste en tareas de levantamiento y manipulación de cargas liberándolo del soporte directo de la carga. El sistema es suficientemente ligero para que un operario pueda introducirlo manualmente en el entorno de trabajo, ensamblarlo convenientemente, y cambiarlo de emplazamiento durante la realización de la tarea encomendada.
UN DISPOSITIVO DE UN ELEMENTO DE TRABAJO CON DOS GRADOS DE MOVILIDAD.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/2002). Solicitante/s: CONSEJO SUPERIOR INVESTIGACIONES CIENTIFICAS. Clasificación: B23Q1/48, B25J9/10, B23Q1/25.
Un dispositivo de un elemento de trabajo con dos grados de movilidad. Un elemento de trabajo con dos grados de movilidad, el cual, con la ayuda de dos motores consigue mover dos eslabones móviles, uno de ellos actuando sobre el elemento de trabajo, este es un método que se distingue por la acción simultanea sobre un elemento de trabajo con la ayuda de otro eslabón móvil. La conducción de un elemento de trabajo con dos grados de movilidad que tiene dos motores uno de los cuales esta ubicado en la base y conectado cinemáticamente con un extremo del primer eslabón móvil localizado en la base con posibilidad de movimiento y otro motor conectado cinemáticamente con un extremo del segundo eslabón móvil, y el elemento de trabajo que está conectado con el otro extremo del segundo eslabón móvil.
{kind=link}