8 inventos, patentes y modelos de GOMEZ DE GABRIEL,JESUS MANUEL
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico.
Secciones de la CIP Técnicas industriales diversas y transportes Física Mecánica, iluminación, calefacción, armamento y voladura Necesidades corrientes de la vida
(27/03/2020). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B64C39/02, G09F3/00, B25J15/06, B25J15/04, F16B2/10, A44C5/12, B64D1/02.
Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles unidas entre sí mediante un eje y mediante al menos un elemento elástico . Las palancas abatibles están configuradas para rotar respecto al eje entre una primera posición y una segunda posición al ser presionadas por el brazo mecánico . En la primera posición, el elemento elástico se encuentra a un primer lado del eje , de modo que la tensión de dicho elemento elástico presiona las palancas abatibles contra el brazo mecánico . En la segunda posición, el elemento elástico se encuentra a un segundo lado del eje , de modo que la tensión de dicho elemento elástico mantiene las palancas abatibles en dicha segunda posición, sin contactar el brazo mecánico , y unos medios de sujeción fijan el dispositivo a un cuerpo.
PDF original: ES-2750880_A1.pdf
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y BRAZO MANIPULADOR MULTIPLE, Y ELEMENTOS DE CONTROL Y SENSORIALES SEPARABLES Y AL MISMO TIEMPO FUNCIONALES.
(17/08/2011) Sistema robótico con capacidad todoterreno y brazo manipulador múltiple, y elementos de control y sensoriales separables y al mismo tiempo funcionales. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y un brazo manipulador múltiple. Este brazo permite al sistema manipular con destreza cargas de interés, como elementos peligrosos o víctimas de desastre. Gracias a que el sistema de control y el sistema sensorial son separables del sistema robótico pero mantienen su funcionalidad y comunican sus consignas y la información del entorno mediante enlaces por radio, la carga de pago del sistema…
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y PLATAFORMA GIROESTABILIZADA PARA COLABORACION CON VEHICULOS AEREOS NO TRIPULADOS.
(28/10/2010) Sistema robótico con capacidad todoterreno y plataforma giroestabilizada para colaboración con vehículos aéreos no tripulados. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y una plataforma horizontal dotada de dos grados de libertad. Esta plataforma permite la colaboración con vehículos aéreos no tripulados en la forma de facilitar su despegue y aterrizaje sobre el sistema robótico móvil, gracias a la estabilización automática de la plataforma que se mantendrá horizontal
SISTEMA ROBOTICO DE ASISTENCIA A LA CIRUGIA MINIMAMENTE INVASIVA CAPAZ DE POSICIONAR UN INSTRUMENTO QUIRURGICO EN RESPUETA A LAS ORDENES DE UN CIRUJANO SIN FIJACION A LA MESA DE OPERACIONES NI CALIBRACION PREVIA DEL PUNTO DE INSERCION.
Sección de la CIP Necesidades corrientes de la vida
(16/03/2009). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B17/00, A61B19/00.
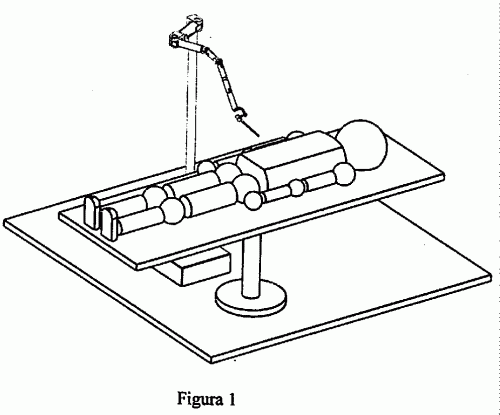
Sistema robótico de asistencia a la cirugía mínimamente invasiva capaz de posicionar un instrumento quirúrgico en respuesta a las órdenes de un cirujano sin fijación a la mesa de operaciones ni calibración previa del punto de inserción.#El sistema consta de un robot manipulador de tres grados de libertad activos dotado de un efector final con dos grados de libertad pasivos que permite sujetar un instrumento quirúrgico, un controlador para el robot integrado en la estructura del mismo y capaz de implementar un método que calcula el movimiento que debe imprimirse al instrumento quirúrgico portado para que éste llegue a la localización deseada sin necesidad de calibración previa ni de fijación del conjunto a la mesa de operaciones, y un sistema de interfaz para ordenar las acciones deseadas al sistema. El conjunto robot, controlador y sistema de interfaz se alimenta mediante baterías.
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
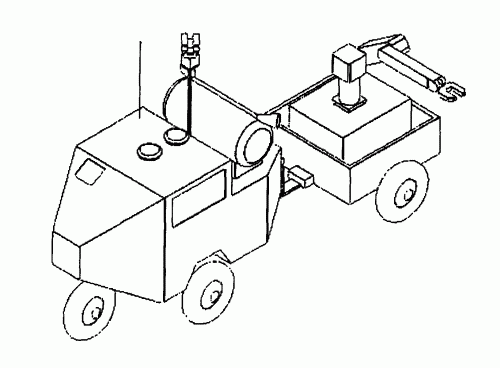
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
SISTEMA DE TELEOPERACION DE ROBOTS PARA CIRUGIA LAPAROSCOPICA.
(01/03/2005) Sistema de teleoperación de robots para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano presente en el quirófano o situado en una localización distante. El sistema consta de un robot manipulador dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot integrado en la estructura del mismo, y un sistema de interfaz para ordenar las acciones deseadas al sistema. Este sistema de interfaz consta de un módulo anexo al controlador del robot, que interpreta las órdenes que el usuario desea que ejecute el robot, y unos medios para emitir dichas órdenes. Estos medios de entrada pueden encontrarse físicamente dentro del quirófano en el que se realiza la operación, o pueden situarse en un punto remoto, comunicado con el resto del sistema…
SISTEMA ROBOTICO ASISTENTE PARA CIRUGIA LAPAROSCOPICA.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B1/00, A61B17/00.
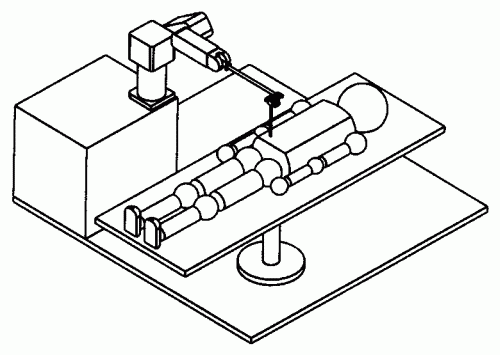
Sistema robótico asistente para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano. El sistema consta de un robot dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot y un computador que permite interpretar las órdenes emitidas por el cirujano, bien mediante un sistema de reconocimiento de voz, bien mediante un teclado adosado al brazo robot.
SISTEMA ROBOTICO ASISTENTE PARA CIRUGIA LAPAROSCOPICA.
Sección de la CIP Necesidades corrientes de la vida
(16/08/2001). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B1/00, A61B17/00.
Sistema robótico asistente para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano. El sistema consta de un robot industrial dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot industrial y un computador que permite interpretar las órdenes emitidas por el cirujano, bien mediante un sistema de reconocimiento de voz, bien mediante un teclado adosado al brazo robot.
{kind=link}
{kind=link}
{kind=link}
{kind=link}