9 inventos, patentes y modelos de GOMA AYATS,JOAN RAMON
MÉTODO PARA EL DIAGNÓSTICO DEL NIVEL DE TRANSMISIÓN DE VIBRACIONES DESDE UNA SUPERFICIE DE TRÁNSITO DE VEHÍCULOS FERROVIARIOS Y BANCO DE ENSAYO PARA SU IMPLEMENTACIÓN.
(19/04/2012) Método para el diagnóstico del nivel de transmisión de vibraciones desde una superficie de tránsito de vehículos ferroviarios y banco de ensayo para su implementación.
El método está basado en la toma de unas mediciones de intensidad de vibración en una zona inmediata a la prevista para el paso de vehículos ferroviarios y en un punto distante, a evaluar, susceptible de ser afectado por la vibración, tomando en este último unas mediciones durante el paso de los vehículos y en ausencia de su tránsito para obtener por comparación de las intensidades de vibración mediciones la función de transferencia de vibración desde la zona de paso de trenes al citado punto distante. El método comprende generar con un banco de ensayo en la zona prevista para el paso de los vehículos ferroviarios unas…
MECANISMO VARIADOR E INVERSOR DE VELOCIDAD PROGRESIVO CON RENDIMIENTO OPTIMO EN AMBOS SENTIDOS.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/09/2005). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: F16H37/00.
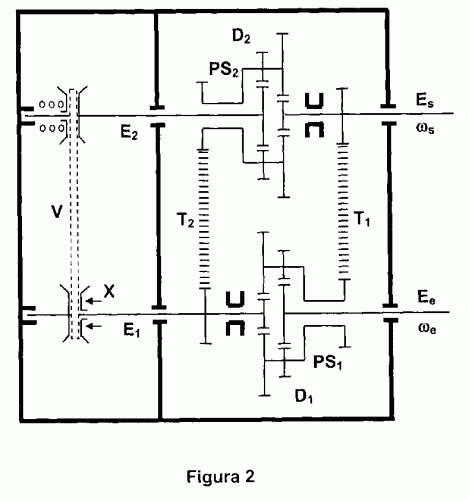
Mecanismo variador e inversor de velocidad progresivo con rendimiento óptimo en ambos sentidos, caracterizado por estar compuesto por dos mecanismos diferenciales D1 y D2 , un mecanismo variador de velocidad progresivo no inversor V y un eje de salida Es colector; caracterizado porque un primer diferencial D1 divide la potencia del eje de entrada Ee en dos ramas, una de las cuales va directamente al eje de salida Es o colector a través de una determinada relación de transmisión T1 y la otra va al mecanismo variador progresivo no inversor V , y los dos ejes E1 y E2 de éste a su vez actúan simultáneamente, a través de relaciones de transmisión adecuadas, sobre el segundo mecanismo diferencial D2 adecuadamente para que éste reste sus velocidades angulares y entregue la potencia al colector de salida Es obligando a éste a girar a una velocidad proporcional a dicha diferencia.
MECANISMO CON RELACION DE TRANSMISION VARIABLE DE MANERA CONTINUA ENTRE + INFINITO, O Y - INFINITO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/09/2005). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: F16H37/00.
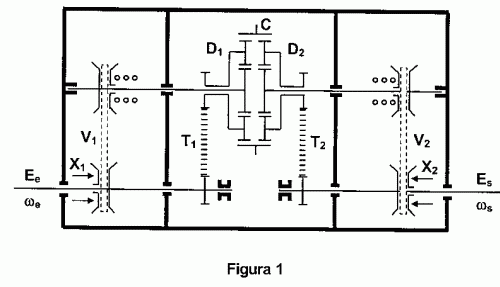
Mecanismo con relación de transmisión variable de manera continua entre + Infinito, 0, y - Infinito , caracterizado por estar compuesto por dos variadores de velocidad progresivos V1 y V2 y dos diferenciales D1 y D2. A partir de un eje de entrada Ee se transmite el giro a dos entradas de un primer mecanismo diferencial D1, a una de ellas a través de una relación de transmisión fija T1 y a la otra a través de un variador de velocidad V1. A partir del eje de salida de este primer mecanismo diferencial se transmite el giro a un eje de entrada del segundo mecanismo diferencial D2. Los dos ejes de salida de este segundo mecanismo diferencial transmiten el movimiento al eje de salida. Es del mecanismo global mediante una relación de transmisión fija T2 uno de ellos y mediante un segundo variador de velocidad V2 el segundo.
SISTEMA DE DESBOBINADO A TENSION CONSTANTE PARA MAQUINAS TRENZADORAS.
Secciones de la CIP Electricidad Técnicas industriales diversas y transportes Textiles y papel
(01/05/2005). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: H01R39/64, B65H59/38, D04C3/14.
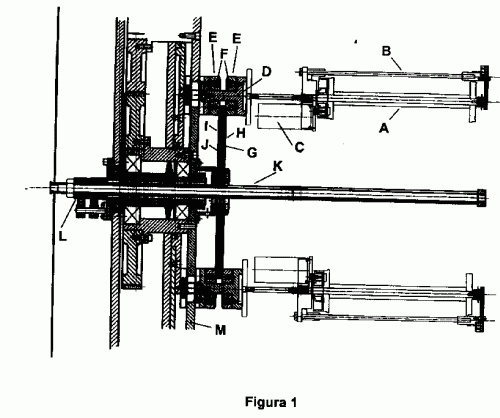
Sistema de desbobinado a tensión constante para máquinas trenzadoras, caracterizado por la instalación de un motor eléctrico C en cada portacarretes A, un sensor B de tensión del hilo, un circuito impreso con un microcontrolador y los componentes necesarios para controlar el motor siguiendo una consigna de tensión deseada en el hilo. También caracterizado por el sistema de transmisión de energía eléctrica hasta cada portacarretes A, garantizando constantemente la alimentación de todos ellos a lo largo de su trayectoria, a pesar de ir pasando éstos por distintos platos giratorios conductores G. Dicha alimentación se realiza mediante los contactos giratorios L, el tubo giratorio K, los platos giratorios conductores G, las placas conductoras H e I de éstos, y los contactos E de los acoplamientos D de los portacarretes, con los muelles F para asegurar su contacto adecuado con las placas conductoras de los platos giratorios conductores G.
SISTEMA DE TRANSMISION HIDROSTATICA ACTIVA PARA VEHICULOS ARTICULADOS CON TRACCION EN LAS CUATRO RUEDAS.
(16/09/2004) Sistema de transmisión hidrostática activa para vehículos articulados con tracción en las cuatro ruedas. Sistema de transmisión hidrostática activa para vehículos articulados, caracterizado por la capacidad de detectar el deslizamiento de una, dos o tres de las ruedas mediante un microcontrolador a partir de las señales de velocidad angular y caída de presión en cada rueda, y del radio de giro del vehículo. Caracterizado por la conmutación automática de las servoválvulas VI y VD, de la posición 1, conexión paralelo, a la posición 2, conexión serie, pasando por la posición intermedia 0, donde se ajusta automáticamente la cilindrada de la bomba variable B. Caracterizado por la conexión automática en serie de las ruedas del mismo lado cuando una patina y el retorno a la conexión original cuando deja de patinar. Caracterizado…
VALVULA REGULADORA DE CAUDAL DOBLE Y REVERSIBLE.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/08/2004). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: F16K17/30, F16K17/22.
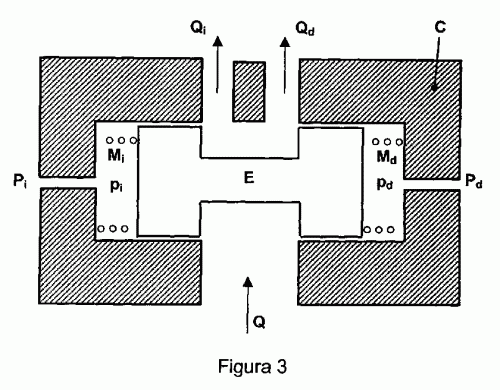
Válvula reguladora de caudal doble y reversible compuesta por una corredera E, un cuerpo C y dos muelles Mi y Md. En el cuerpo se han practicado los orificios Q, Qi, Qd, Pi y Pd. La válvula provoca una bifurcación del caudal que circula por Q en dos, por Qi y Qd. Además puede provocarse una pérdida de carga en Qi o Qd regulable por medio de la diferencia de presiones pi y pd aplicadas entre Pi y Pd. Si pi>pd, la corredera E se desplaza hacia la derecha y se obstruye parcial o totalmente Qi. Si pd>pi, la corredera E se desplaza hacia la izquierda y se obstruye parcialmente Qd. Variando la diferencia de presión entre Pi y Pd, se variará el valor del desplazamiento de la corredera E y por tanto la relación entre los caudales bifurcados por Qi y por Qd.
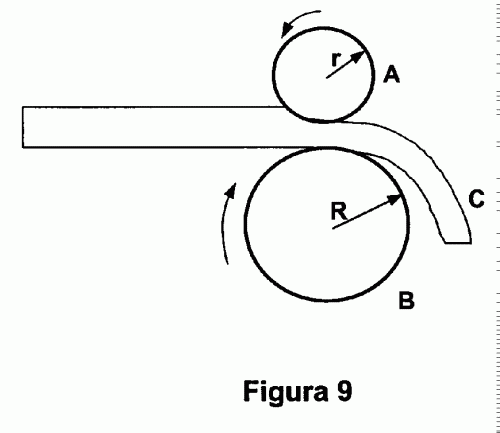
PROCEDIMIENTO PARA CURVAR CHAPA CON CURVATURA DESDE LOS EXTREMOS.
Sección de la CIP Técnicas industriales diversas y transportes
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: B21D5/14.
Procedimiento para curvar chapa con curvatura desde los extremos. Procedimiento para curvar chapa (C) con curvatura desde los extremos caracterizado por ser un laminado entre dos rodillos (A y B) de distinto radio (r y R). En función de la diferencia de radios, variando la distancia entre los dos rodillos se puede variar la curvatura de la chapa curvada, sin necesidad de cambiar ni fabricar utillaje adicional alguno. Si durante el proceso de curvado se va regulando la distancia entre los dos rodillos, mediante un control numérico computerizado u otro sistema, se puede obtener curvas con radio de curvatura no constante.
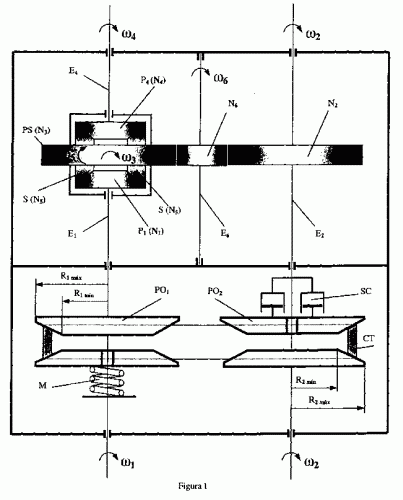
MECANISMO VARIADOR DE VELOCIDAD PROGRESIVO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/10/2003). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: F16H37/08.
Mecanismo variador de velocidad progresivo compuesto por dos ejes coaxiales E1 y E4 y un tercer eje paralelo a ambos E2. Entre los ejes E1 y E2 hay una corona portasatélites PS cuyos satélites engranan con los planetas P1 y P4 solidarios respectivamente a los ejes E1 y E4. La corona portasatélites PS a su vez está ligada al eje E2 a través de una transmisión que invierta el sentido de giro. Entre los ejes E1 y E2 además se establece una transmisión con relación variable por medio de dos poleas cónicas PO1 y PO2 solidarias respectivamente a E1 y E2 entre las que se monta una correa trapezoidal CT. Las poleas PO1 y PO2 tienen una anchura variable, una de ellas se mantiene presionada por un muelle M y en la otra se gobierna la anchura por medio de un mecanismo que permita controlar la posición.
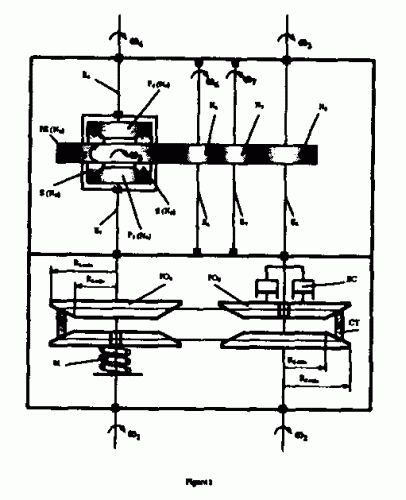
MECANISMO VARIADOR E INVERSOR DE VELOCIDAD PROGRESIVO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(16/10/2003). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: F16H37/08.
Mecanismo variador e inversor de velocidad progresivo compuesto por dos ejes coaxiales E1 y E4 y un tercer eje paralelo a ambos E2. Entre los ejes E1 y E2 hay una corona portasatélites PS cuyos satélites engranan con los planetas P1 y P4 solidarios respectivamente a los ejes E1 y E4. La corona portasatélites PS a su vez está ligada al eje E2 a través de una transmisión que no invierta el sentido de giro. Entre los ejes E1 y E2 además se establece una transmisión con relación variable por medio de dos poleas cónicas PO1 y PO2 solidarias respectivamente a E1 y E2 entre las que se monta una correa trapezoidal CT. Las poleas PO1 y PO2 tienen una anchura variable, una de ellas se mantiene presionada por un muelle M y en la otra se gobierna la anchura por medio de un mecanismo que permita controlar la posición.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}