10 inventos, patentes y modelos de GARCIA CEREZO,ALFONSO JOSE
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO.
Secciones de la CIP Técnicas industriales diversas y transportes Física Mecánica, iluminación, calefacción, armamento y voladura Necesidades corrientes de la vida
(02/04/2020). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B64C39/02, G09F3/00, B25J15/06, B25J15/04, F16B2/10, A44C5/12, B64D1/02.
Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles unidas entre sí mediante un eje y mediante al menos un elemento elástico . Las palancas abatibles están configuradas para rotar respecto al eje entre una primera posición y una segunda posición al ser presionadas por el brazo mecánico . En la primera posición, el elemento elástico se encuentra a un primer lado del eje , de modo que la tensión de dicho elemento elástico presiona las palancas abatibles contra el brazo mecánico . En la segunda posición, el elemento elástico se encuentra a un segundo lado del eje , de modo que la tensión de dicho elemento elástico mantiene las palancas abatibles en dicha segunda posición, sin contactar el brazo mecánico , y unos medios de sujeción fijan el dispositivo a un cuerpo.
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico.
Secciones de la CIP Técnicas industriales diversas y transportes Física Mecánica, iluminación, calefacción, armamento y voladura Necesidades corrientes de la vida
(27/03/2020). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B64C39/02, G09F3/00, B25J15/06, B25J15/04, F16B2/10, A44C5/12, B64D1/02.
Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles unidas entre sí mediante un eje y mediante al menos un elemento elástico . Las palancas abatibles están configuradas para rotar respecto al eje entre una primera posición y una segunda posición al ser presionadas por el brazo mecánico . En la primera posición, el elemento elástico se encuentra a un primer lado del eje , de modo que la tensión de dicho elemento elástico presiona las palancas abatibles contra el brazo mecánico . En la segunda posición, el elemento elástico se encuentra a un segundo lado del eje , de modo que la tensión de dicho elemento elástico mantiene las palancas abatibles en dicha segunda posición, sin contactar el brazo mecánico , y unos medios de sujeción fijan el dispositivo a un cuerpo.
PDF original: ES-2750880_A1.pdf
Sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica y método asociado.
(05/09/2014) Sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica y método asociado.
La presente invención se refiere a un sistema de inspección de elementos a presión de calderas de recuperación de centrales de generación eléctrica que comprende un robot formado a su vez por un sistema de refrigeración, otro de posicionamiento y un cabezal sensor que integra un conjunto de elementos que llevan a cabo la detección de defectos en los elementos de la caldera a inspeccionar, donde dicho cabezal sensor incorpora un periscopio abatible que junto con una cámara permite tomar imágenes del interior de la caldera para la posterior inspección y detección de los elementos a presión de la misma, mientras que el método de inspección…
TELÉMETRO 3D Y PROCEDIMIENTO DE OBTENCIÓN MEDIANTE CABECEO DE UN TELÉMETRO LÁSER 2D ALREDEDOR DE SU CENTRO ÓPTICO.
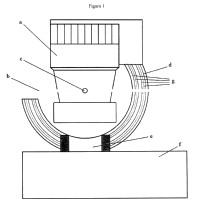
(25/05/2012) Telémetro láser 3D y procedimiento de obtención mediante cabeceo de un telémetro láser 2D alrededor de su centro óptico manteniendo su máximo campo de visión. El telémetro láser 2D (a) rota a velocidad constante mediante un servo-motor dotado de codificador angular situado en una base (f), que hace cabecear el telémetro láser 2D en torno a su centro óptico (c). Así se mantiene el mínimo rango de distancias del telémetro láser 2D, se evita la calibración de la distancia al centro de rotación y se reduce el tiempo de toma de medidas. La adquisición de distancias se realiza de forma sincronizada con los ángulos del eje del motor y de inclinación del aparato. Ello permite obtener las coordenadas Cartesianas, respecto de un sistema de referencia situado en el centro óptico y con uno de sus ejes alineado con la gravedad, de los rangos asociados a los…
TELÉMETRO 3D Y PROCEDIMIENTO DE OBTENCIÓN MEDIANTE CABECEO DE UN TELÉMETRO LÁSER 2D ALREDEDOR DE SU CENTRO ÓPTICO.
Sección de la CIP Física
(03/05/2012). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01B11/02, G01S17/32.
Telémetro láser 3D y procedimiento de obtención mediante cabeceo de un telémetro láser 2D alrededor de su centro óptico manteniendo su máximo campo de visión. El telémetro láser 2D (a) rota a velocidad constante mediante un servo-motor dotado de codificador angular situado en una base (f), que hace cabecear el telémetro láser 2D en torno a su centro óptico (c). Así se mantiene el mínimo rango de distancias del telémetro láser 2D, se evita la calibración de la distancia al centro de rotación y se reduce el tiempo de toma de medidas. La adquisición de distancias se realiza de forma sincronizada con los ángulos del eje del motor y de inclinación del aparato. Ello permite obtener las coordenadas Cartesianas, respecto de un sistema de referencia situado en el centro óptico y con uno de sus ejes alineado con la gravedad, de los rangos asociados a los puntos detectados.
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y BRAZO MANIPULADOR MULTIPLE, Y ELEMENTOS DE CONTROL Y SENSORIALES SEPARABLES Y AL MISMO TIEMPO FUNCIONALES.
(17/08/2011) Sistema robótico con capacidad todoterreno y brazo manipulador múltiple, y elementos de control y sensoriales separables y al mismo tiempo funcionales. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y un brazo manipulador múltiple. Este brazo permite al sistema manipular con destreza cargas de interés, como elementos peligrosos o víctimas de desastre. Gracias a que el sistema de control y el sistema sensorial son separables del sistema robótico pero mantienen su funcionalidad y comunican sus consignas y la información del entorno mediante enlaces por radio, la carga de pago del sistema…
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y PLATAFORMA GIROESTABILIZADA PARA COLABORACION CON VEHICULOS AEREOS NO TRIPULADOS.
(28/10/2010) Sistema robótico con capacidad todoterreno y plataforma giroestabilizada para colaboración con vehículos aéreos no tripulados. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y una plataforma horizontal dotada de dos grados de libertad. Esta plataforma permite la colaboración con vehículos aéreos no tripulados en la forma de facilitar su despegue y aterrizaje sobre el sistema robótico móvil, gracias a la estabilización automática de la plataforma que se mantendrá horizontal
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
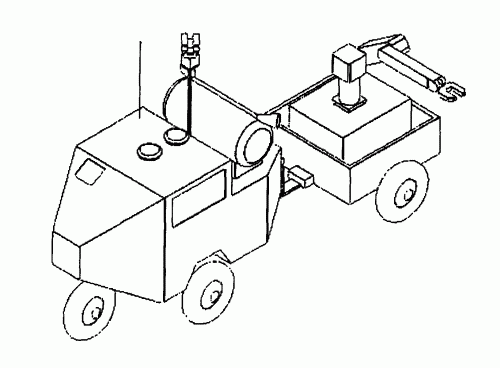
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
SISTEMA DE TELEOPERACION DE ROBOTS PARA RESECCION TRANSURETRAL DE LA PROSTATA.
Sección de la CIP Necesidades corrientes de la vida
(01/02/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B17/00.
Sistema de teleoperación de robots para resección transuretral de la próstata, capaz de mover el resector en respuesta a las órdenes del cirujano. El sistema consta de un robot manipulador de al menos cuatro grados de libertad dotado de un efector final que permite sujetar el resector, un controlador para el robot, y un manipulador maestro que reproduce la forma del resector o que permite engarzar en él un resector real. Opcionalmente, puede contar con un computador que haga de interfaz entre el robot y el manipulador maestro, si la capacidad del controlador del robot utilizado no es suficiente. Como medios alternativos para mover el brazo robot puede contarse con un sistema de reconocimiento de voz o un teclado.
ROBOT MOVIL TRACCIONADO POR CADENAS CON CAPCAIDAD DE OPERACION AUTONOMA Y TELEOPERADA.
Secciones de la CIP Física Técnicas industriales diversas y transportes
(16/02/2002). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/00, B62D55/06.
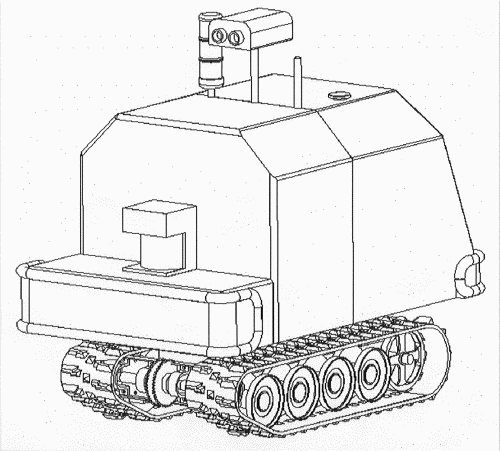
Robot móvil traccionado por cadenas con capacidad de operación autónoma y teleoperada, que comprende un sistema de locomoción por cadenas con direccionamiento por deslizamiento, un sistema de alimentación eléctrica por grupo autógeno, un sistema sensorial para control y monitorización remota, un sistema de alarma por indicador luminoso y acústico, un sistema de comunicaciones radio con la estación remota y un sistema de control basado en una red de computadores. Está preparado para desenvolverse en terrenos de difícil transitabilidad y para trabajar en entornos hostiles y peligrosos en tareas de inspección, vigilancia, transporte y asistencia.
{kind=link}
{kind=link}
{kind=link}
{kind=link}