EXOESQUELETO PARA ASISTENCIA AL MOVIMIENTO HUMANO.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(27/06/2016). Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Clasificación: A61H1/02, A61F5/01, B25J9/00.
Exoesqueleto para asistencia al movimiento humano.
La presente invención se refiere a un exoesqueleto para asistencia al movimiento humano ajustable al usuario en dimensiones, tensiones y rangos articulares, pudiendo ser este ajuste manual o automático, donde su colocación en el usuario puede ser en la dirección anterioposterior en el plano sagital, pudiendo colocarse desde tumbado o sentado sin necesidad de transferencia funcional, donde el exoesqueleto presenta un diseño modular, compatible con la biomecánica humana y que reproduce un movimiento natural y fisiológico en el usuario, con hasta 7 grados de movilidad actuados y controlados por extremidad, garantizando la estabilidad del equilibrio del usuario durante la locomoción.
PDF original: ES-2575255_A1.pdf
PDF original: ES-2575255_B1.pdf
EXOESQUELETO PARA ASISTENCIA AL MOVIMIENTO HUMANO.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(02/06/2016). Solicitante/s: MARSI BIONICS S.L. Clasificación: A61H1/02, A61F5/01, B25J9/00, A61H3/00.
La presente invención se refiere a un exoesqueleto para asistencia al movimiento humano ajustable al usuario en dimensiones, tensiones y rangos articulares, pudiendo ser este ajuste manual o automático, donde su colocación en el usuario puede ser en la dirección anterio- posterior en el plano sagital, pudiendo colocarse desde tumbado o sentado sin necesidad de transferencia funcional, donde el exoesqueleto presenta un diseño modular, compatible con la biomecánica humana y que reproduce un movimiento natural y fisiológico en el usuario, con hasta 7 grados de movilidad actuados y controlados por extremidad, garantizandola estabilidad del equilibrio del usuario durante la locomoción.
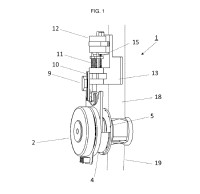
ARTICULACIÓN CON RIGIDEZ CONTROLABLE Y DISPOSITIVO DE MEDICIÓN DE FUERZA.
(14/01/2015) El objeto de la invención es una articulación con rigidez controlable y medición de fuerza, comprende un primer dispositivo , que comprende un marco con una cara curva, conectado con un primer elemento motor , realizando este primer dispositivo la regulación de la posición de la articulación , y un segundo dispositivo que regula la rigidez de la articulación , que comprende un elemento de empuje cuyo desplazamiento (D) determina una pre-compresión de un elemento resistivo determinando de este modo la rigidez de la articulación , y el primer elemento motor proporciona un giro al marco tal que una rueda del segundo dispositivo recorre la cara curva del marco generando una compresión (C) del elemento resistivo a través de una barra de transmisión asociada a dicha rueda y al elemento…
ARTICULACIÓN CON RIGIDEZ CONTROLABLE Y DISPOSITIVO DE MEDICIÓN DE FUERZA.
Secciones de la CIP Necesidades corrientes de la vida Técnicas industriales diversas y transportes
(18/12/2014). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Clasificación: A61F2/30, B25J17/02, B25J19/06.
El objeto de la invención es una articulación con rigidez controlable y medición de fuerza, comprende un primer dispositivo , que comprende un marco con una cara curva, conectado con un primer elemento motor , realizando este primer dispositivo la regulación de la posición de la articulación , y un segundo dispositivo que regula la rigidez de la articulación , que comprende un elemento de empuje cuyo desplazamiento (D) determina una pre-compresión de un elemento resistivo determinando de este modo la rigidez de la articulación , y el primer elemento motor proporciona un giro al marco tal que una rueda del segundo dispositivo recorre la cara curva del marco generando una compresión (C) del elemento resistivo a través de una barra de transmisión asociada a dicha rueda y al elemento resistivo.
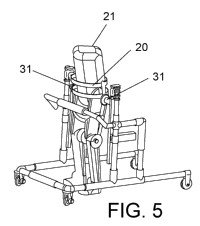
ANDADOR CON MECANISMO DE ASISTENCIA EN OPERACIONES DE LEVANTADO Y SENTADO DE UN USUARIO.
(12/05/2014) Andador con mecanismo de asistencia en operaciones de levantado y sentado de un usuario que comprende una estructura de soporte dotada de medios de desplazamiento , un dispositivo de sujeción del usuario al andador y un sistema de bloqueo de los medios de desplazamiento, donde la estructura de soporte comprende al menos un brazo pivotante que guía al dispositivo de sujeción del usuario , un soporte guía fijado al andador y que guía al brazo y un módulo de control que controla el sistema de bloqueo de los medios de desplazamiento y que comprende medios de selección de un modo de trabajo del andador seleccionado entre "modo andar" y "modo sentarse/levantarse".
ANDADOR CON MECANISMO DE ASISTENCIA EN OPERACIONES DE LEVANTADO Y SENTADO DE UN USUARIO.
Sección de la CIP Necesidades corrientes de la vida
(17/04/2014). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Clasificación: A61H3/04, A61G5/02, A61G5/14.
Andador con mecanismo de asistencia en operaciones de levantado y sentado de un usuario que comprende una estructura de soporte dotada de medios de desplazamiento , un dispositivo de sujeción del usuario al andador y un sistemade bloqueo de los medios de desplazamiento, donde la estructura de soporte comprende al menos un brazo pivotante que guía al dispositivo de sujeción del usuario , un soporte guía fijado al andador y que guía al brazo y un módulo de control que controla el sistema de bloqueo de los medios de desplazamiento y que comprende medios de selección de un modo de trabajo del andador seleccionado entre "modo andar" y "modo sentarse/levantarse".
BANCO DE ENSAYOS UNIVERSAL PARA LA EVALUACION DE ACTUADORES.
(23/10/2012) Banco de ensayos universal para la evaluación de actuadores.
Permite ensayar actuadores de ensayo de tipo lineal y rotacional, independientemente de que su accionamiento sea hidráulico, eléctrico, mecánico, térmico, etc. empleando un actuador antagónico . Permite reproducir de manera precisa condiciones reales de funcionamiento, tanto de tipo dinámico como ambiental. Dispone de un controlador para programar una función continua de fuerza en el actuador antagónico con precisión mediante control en lazo cerrado. Comprende un chasis con una base a la que están fijadas unas primeras barras sobre las que se desplazan bastidores a los que están fijados los actuadores , que accionan simultáneamente un eje central de rotación provisto de un transductor…
BRAZO MANIPULADOR DE CARGAS CON PARES DE ACTUACION REDUCIDOS.
(14/09/2012) Brazo manipulador de cargas con pares de actuación reducidos.
La patente describe un brazo manipulador (1, 1', 1'') de cargas con bajos pares de actuación, que comprende varios eslabones (6, 6', 6'', 10, 10', 10'') intermedios unidos entre sí por articulaciones (5, 5', 5'', 9, 9', 9''), donde el último eslabón (14, 14', 14'') está unido a una articulación activa (13, 13', 13''), comprendiendo un mecanismo de cuatro barras (11a, 11a', 11a'', 11b, 11b', 11b'', 12, 12', 12'', 15, 15', 15'') cuya barra de extremo (15, 15', 15''), que se proyecta hacia abajo en dirección vertical, tiene un punto de enganche al que se acopla la carga.
BANCO DE PRUEBAS PARA LA CARACTERIZACIÓN DE ACTUADORES BASADOS EN MATERIALES FERROMAGNÉTICOS CON MEMORIA DE FORMA.
(12/07/2012) Banco de pruebas para la caracterización de activadores basados en materiales ferromagnéticos con memoria de forma.
Destaca fundamentalmente por presentar un diseño modular, formado por al menos tres módulos dispuestos de forma alineada sobre una base inferior mecanizada dotada de orificios y ranuras para la fijación de dichos módulos mediante unos medios de unión , y mediante los cuales es posible realizar una sencilla adición, sustitución y modificación de los mismos, comprendiendo: un primer módulo que dispone de un circuito magnético en el cual se dispone al menos una muestra de material MSM, estando dicho circuito magnético formado por un núcleo ferromagnético y unos bobinados ; un segundo…
POSICIONADOR PLANO DE DOS GRADOS DE LIBERTAD CON ACTUADORES ESTATICOS Y CONFINADOS.
(16/03/2008) Posicionador plano de dos grados de libertad con actuadores estáticos y confinados.#El dispositivo objeto de la presente invención consiste en un sistema posicionador paralelo de dos grados de libertad con los actuadores estáticos y confinados que permite posicionamientos de un punto (conocido como punto efectivo) sobre un plano. El sistema dispone de dos actuadores que trabajan simultánea y conjuntamente (en paralelo) en el desplazamiento de dos articulaciones. Esta disposición permite utilizar actuadores de menor potencia que en los sistemas tradicionales y está indicado para trabajar con objetos explosivos o inflamables de manera que ante eventuales accidentes (explosiones)…
{kind=link}
{kind=link}