Sistema vestible para interacción con entornos remotos mediante información gestual y sensaciones táctiles.
(17/08/2016) 1. Sistema vestible para interacción de un usuario humano con una o más máquinas o personas ubicadas en entornos remotos caracterizado porque comprende los siguientes elementos:
a. Un traje háptico para la captura de información gestual y el movimiento corporal de un usuario humano que comprende a su vez de:
i. una pluralidad de unidades de medición inercial que calculan la orientación espacial de los segmentos del cuerpo del usuario humano respecto a un sistema de referencia global,
ii. uno o más vibradores o arreglos de vibradores que proporcionan sensaciones táctiles al usuario .
b. Uno a dos guantes hápticos de datos para la captura del movimiento de las manos del usuario humano…
Robot submarino humanoide transformable.
(26/08/2015) Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación se sucede desde una configuración humanoide en la cual el robot inclina el tronco hacia adelante y flexiona las patas , manteniendo erguida la cabeza , de manera que la maniobra culmina en un postura en la que el robot se agacha, mientras que las siguiente fases implican la flexión completa del torso coordinada esta acción con la flexión de los brazos , mientras la cabeza continúa erguida. El proceso opuesto de transformación es igualmente posible en el orden inverso.
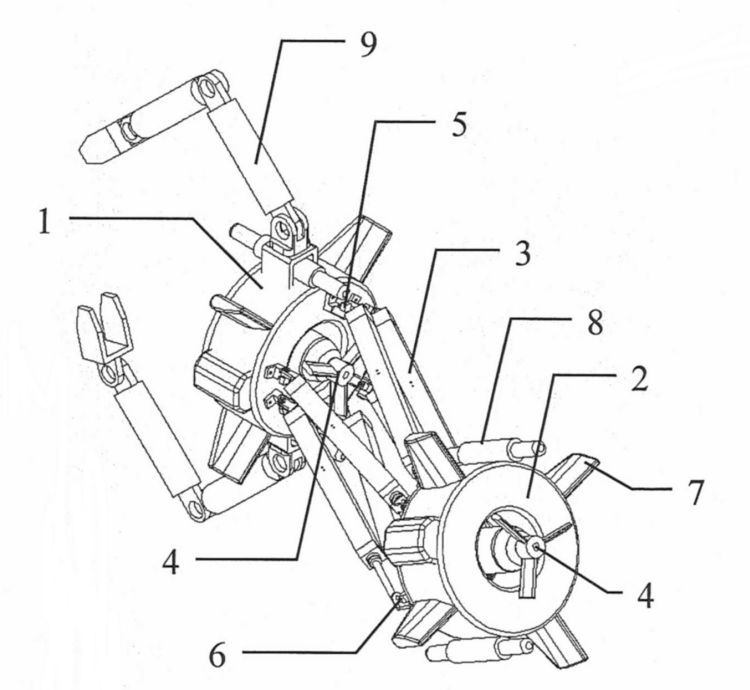
Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
(19/06/2015) Sistema paralelo de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
El sistema está formado por dos mecanismos paralelos tipo SCARA, cada uno de los cuales está formado por dos brazos articulados entre sí por juntas rotacionales , y los brazos articulados entre sí en correspondencia con efectores finales , siendo dicha articulación rotacional-esférica formada por un cojinete o rodamiento y una rótula esférica , de manera que en correspondencia con esas articulaciones va montado un cilindro telescópico que es hueco y en el que se introduce el dispositivo que puede estar formado por un catéter, aguja quirúrgica u otro dispositivo similar, siendo accionados los brazos por motores para que el dispositivo montado en el cilindro…
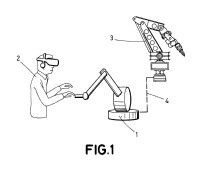
Sistema vestible para interacción con entornos remotos mediante información gestual y sensaciones táctiles y procedimiento de uso.
(24/03/2015) Sistema vestible para interacción con entornos remotos mediante información gestual y sensaciones táctiles y procedimiento de uso.
La presente invención consiste en un sistema vestible que interactúa con un sistema remoto intercambiando información gestual y sensaciones táctiles. El sistema vestible envía información gestual que aporta un usuario humano a través de un traje háptico de captura de movimiento y guantes hápticos de datos . El sistema remoto es estimulado por la información gestual recibida y envía al sistema vestible sensaciones táctiles relacionadas a la reacción ante dichos estímulos. El sistema vestible puede utilizarse para tareas de operación remota…
(29/12/2014) Robot submarino modular.
La presente invención trata de un robot submarino modular con una pluralidad de brazos que es transformable en ROV para trabajos en fondos marinos y en construcciones marinas, es un robot con brazos de morfología humanoide que se corresponde con las proporciones cinemáticas de un humano para realizar trabajos y/o para desplazarse y trepar haciendo uso de sus extremidades.
El objeto de la invención es proporcionar un único dispositivo o robot modular escalable en la cantidad de brazos robóticos que puede combinar funcionalidades de navegación, manipulación y desplazamiento en cualquier dirección gracias a la configuración de sus brazos robóticos e impulsores marinos.
Dispositivo y método para la medición de corrientes de fluidos mediante mecanismo paralelo esférico actuado por fuerzas de arrastre.
(22/12/2014) La presente invención consiste en un medidor de corrientes de fluidos que calcula la velocidad y dirección de un fluido según la fuerza de arrastre que éste ejerce sobre un cuerpo sólido. Consta de un mecanismo paralelo esférico formado por una base fija que permite movimiento esférico a una plataforma móvil mediante un mástil y dos cadenas cinemáticas . Solidaria a la plataforma un tubo soporta un recipiente esférico provisto en su interior de una unidad de medición inercial , que registra la orientación espacial de la plataforma respecto de la base fija generada por acción del fluido sobre el recipiente esférico . Este dispositivo puede utilizarse para medición de corrientes de agua o aire, como instrumento de apoyo en navegación de embarcaciones y para medición de corrientes de fluidos en canales o tuberías.
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD.
(02/08/2013) Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo maestro dividiendo su zona de trabajo en región interna donde se implementa el modo de control en posición del robot esclavo , y región externa donde se implementa el modo de control en velocidad; utilización de una red de comunicaciones para transmitir órdenes de movimiento y fuerzas ejercidas por ambos dispositivos; adaptación del dispositivo maestro para que produzca efectos de vibración en las transiciones entre región interna y externa , indicando el cambio de un modo de control…
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS.
Sección de la CIP Técnicas industriales diversas y transportes
(04/07/2013). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Clasificación: B25J3/04.
Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo maestro dividiendo su zona de trabajo en región interna donde se implementa el modo de control en posición del robot esclavo , y región externa donde se implementa el modo de control en velocidad; utilización de una red de comunicaciones para transmitir órdenes de movimiento y fuerzas ejercidas por ambos dispositivos; adaptación del dispositivo maestro para que produzca efectos de vibración en las transiciones entre región interna y externa , indicando el cambio de un modo de control a otro. El cambio de un modo de control a otro se produce de forma que se garantiza el funcionamiento estable de los dispositivos y la máxima telepropriocepción para el operador.
ROBOT DE ESTRUCTURA CINEMÁTICA HÍBRIDA PARA EL GUIADO DE LA INSERCIÓN DE AGUJAS, CATÉTERES Y ELEMENTOS QUIRÚRGICOS PARA PROCEDIMIENTOS DE CIRUGÍA MÍNIMAMENTE INVASIVA.
(04/12/2012) Robot de estructura cinemática híbrida para el guiado de la inserción de agujas, catéteres y elementos quirúrgicos para procedimientos de cirugía mínimamente invasiva, comprendiendo:
- un mecanismo paralelo esférico de orientación (C) con:
- elemento base ;
- elemento móvil con sistema láser de guiado y unidad inercial para calibración;
- articulación esférica ;
- dispositivo de acople del instrumental quirúrgico ;
- mecanismo serial de posicionamiento (B) acoplado con el elemento base , con eslabones en serie unidos mediante articulaciones rotativas accionadas por actuadores (23a, 23b, 23c) para posicionar en el espacio, según tres grados de libertad, la articulación esférica del mecanismo de orientación (C);
- base , acoplada al mecanismo de posicionamiento (B), para anclar al robot sobre un soporte móvil (A);
-…
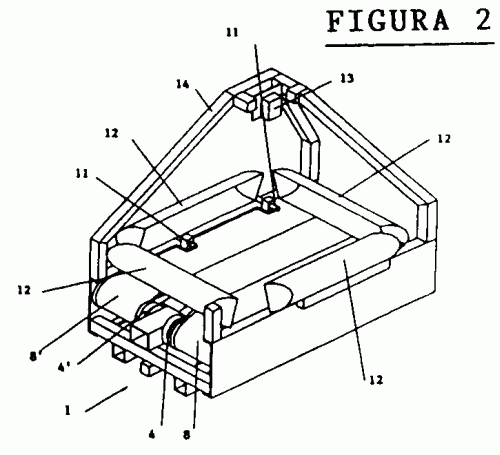
MEJORAS EN LA PATENTE PRINCIPAL P200201666 "ROBOT PARALELO TREPADOR Y DESLIZANTE PARA TRABAJOS EN ESTRUCTURAS Y SUPERFICIES".
Sección de la CIP Técnicas industriales diversas y transportes
(16/07/2007). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID
UNIVERSIDAD POLITECNICA DE CARTAGENA. Clasificación: B63G8/16, B63G8/00B, B63G8/00, B62D57/024.
Mejoras en la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies".#La presente invención se refiere a un robot submarino de estructura paralela consistente en la mejora o desarrollo de la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies" a la navegación teleoperada bajo el agua. El desarrollo que se presenta consiste en adosar a cada anillo del robot y las aletas para el control de la estabilidad y la navegación bajo el agua. El robot submarino, dispone de motores impulsores que van ensamblados en los anillos y y que le permiten propulsarse, así como brazos manipuladores más un sistema de control por computador alojado en los anillos y.
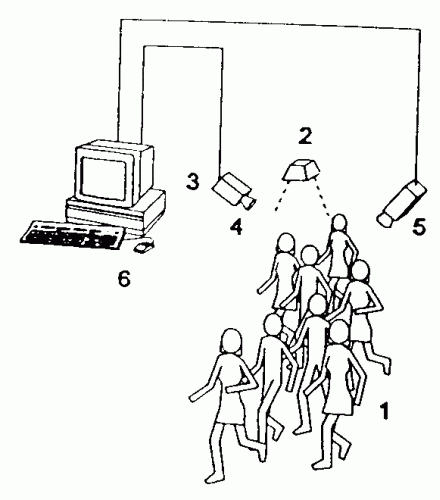
SISTEMA AUTOMATICO DE CONTAJE DE PERSONAS EN MOVIMIENTO.
Secciones de la CIP Física Electricidad
(01/10/1999). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Clasificación: G07C9/00, H04N7/18.
Sistema automático de contaje de personas en movimiento. Sistema para el contaje automático de personas que se desplazan en dos sentidos principales de movimiento; pudiendo cada una de las personas moverse a la misma o diferente velocidad y en cada uno de los sentidos de movimiento. El funcionamiento esta basado en el procesamiento digital de las imágenes adquiridas de la proyección de un patrón de luz de características distintas de la luz ambiente, adquiridas a través de un filtro óptico . Estos datos, junto con la identificación del sentido del movimiento mediante la adquisición de imágenes por una cámara complementaria , detecta y cuenta el paso de personas por la zona reverenciada con el patrón de luz. El sistema es flexible para su aplicación en diferente tipo de recintos y con distintas condiciones de iluminación; estando previsto para su utilización en el contaje de personas pasan por puertas, entran o salen de recintos o pasan por corredores.
SISTEMA PARA EL CONTROL DE CALIDAD DE PIEZAS EN BASE A SU ASPECTO SUPERFICIAL.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/08/1998). Ver ilustración. Solicitante/s: PROTOS DESARROLLO, S.A. Clasificación: B07C5/342, G01N21/84.
SISTEMA PARA EL CONTROL DE CALIDAD DE PIEZAS EN BASE A SU ASPECTO SUPERFICIAL, CON APLICACION A CUALQUIER TIPO DE PIEZA IDENTIFICABLE POR SU DISEÑO, FORMA O TAMAÑO, SIN INTERRUPCION DE LA CADENA DE PRODUCCION. LA PIEZA (P), DURANTE EL PASO POR EL SISTEMA, ES CENTRADA ENTRE ELEMENTOS LONGITUDINALES LATERALES , E ILUMINADA DE MANERA ADECUADA Y HOMOGENEA MEDIANTE PANTALLAS PARABOLICAS , MIENTRAS UN CONJUNTO DE SENSORES PROPORCIONA INFORMACION TANTO DE LAS DIMENSIONES DE LA PIEZA COMO DEL INSTANTE EN QUE DEBE ACTUAR UNA CAMARA DE VIDEO QUE VISUALIZA LAS CARACTERISTICAS DE LA PIEZA (P) Y ENVIA LA INFORMACION A UN ORDENADOR DE CONTROL PARA LA COMPARACION DE LAS CARACTERISTICAS VISUALIZADAS CON LAS DEFINIDAS PREVIAMENTE EN EL MENCIONADO ORDENADOR. TODO EL SISTEMA ES SUPERVISADO CONTINUAMENTE PARA GARANTIZAR QUE TODAS LAS PIEZAS PASAN EL CONTROL, GENERANDO ALARMAS EN CASO DE FALLOS DE ESTE CONTROL.
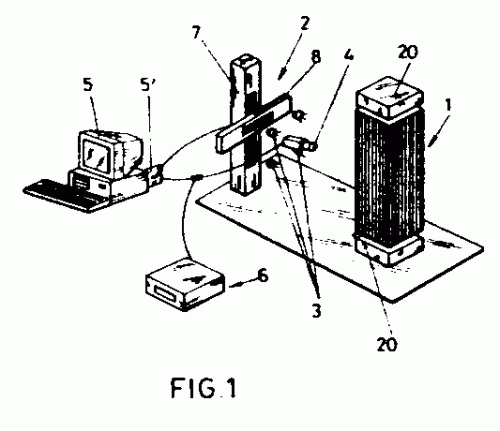
SISTEMA AUTOMATICO DE INSPECCION DE OBJETOS TRIDIMENSIONALES DE GRANDES DIMENSIONES.
Sección de la CIP Física
(01/06/1998). Ver ilustración. Solicitante/s: IBERDROLA, S.A. TECNATOM, S.A. EMPRESA NACIONAL DEL URANIO, S.A. Clasificación: G01B11/16, G21C17/06.
SISTEMA AUTOMATICO DE INSPECCION DE OBJETOS TRIDIMENSIONALES DE GRANDES DIMENSIONES. EL SISTEMA ESTA PREVISTO PARA EFECTUAR LA INSPECCION DIMENSIONAL, AUTOMATICA Y SIN CONTACTO, DE ELEMENTOS COMBUSTIBLES DE CENTRALES NUCLEARES, BASANDOSE EN UN PROCESAMIENTO DIGITAL DE LAS IMAGENES DE DISTINTAS POSICIONES ALREDEDOR DEL ELEMENTO COMBUSTIBLE Y EN SU SINCRONIZACION CON UN SISTEMA MECANICO DE POSICIONAMIENTO DEL SISTEMA DE ADQUISICION DIGITAL DE DICHAS IMAGENES. ESTOS DATOS SON LAS REFERENCIAS PARA EL CALCULO DE LAS MEDIDAS BIDIMENSIONALES Y TRIDIMENSIONALES DEL ELEMENTO COMBUSTIBLE , ESTANDO EL SISTEMA CAPACITADO PARA TRABAJAR EN AMBIENTES ALTAMENTE RADIACTIVOS DENTRO DE LA PISCINA DEL CIRCUITO PRIMARIO DE LAS CENTRALES NUCLEARES. LA ESTRUCTURA DEL SISTEMA ES FLEXIBLE PARA LA INSPECCION DE DIFERENTES TIPOS DE ELEMENTOS COMBUSTIBLES Y DISTINTOS PLANES DE INSPECCION PARA CADA ELEMENTO.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}