14 inventos, patentes y modelos de AMAT GIRBAU,JOSEP
DISPOSITIVO DE REHABILITACIÓN PARA LAS EXTREMIDADES INFERIORES.
Sección de la CIP Necesidades corrientes de la vida
(25/06/2020). Solicitante/s: HOSPITAL SANT JOAN DE DEU. Clasificación: A61H1/02, A63B22/06.
El dispositivo de rehabilitación para las extremidades inferiores comprende un suspensor para colocar un arnés para un usuario del dispositivo de rehabilitación y medios de soporte para los pies del usuario, en el que dichos medios de soporte para los pies del usuario comprenden un par de brazos , cada uno de los cuales comprende en su extremo anterior un soporte para los pies , siendo los brazos extensibles y basculantes, de manera que cada soporte para los pies es desplazable longitudinalmente y verticalmente. Permite un dispositivo para la rehabilitación de la marcha que es suficientemente simplificado para conseguir un menor volumen y unos costes más reducidos para poder ser utilizado en el entorno doméstico, o en ambulatorios locales, y también utilizable para niños y niñas de menor edad afectos de estas patologías.
Techo de flujo de aire laminar para una sala de operaciones.
Secciones de la CIP Mecánica, iluminación, calefacción, armamento y voladura Construcciones fijas Necesidades corrientes de la vida
(02/05/2018). Solicitante/s: CORPORACIÓ SANITARIA PARC TAULÍ . Clasificación: F21S8/00, F21S8/02, F21V21/15, F21S2/00, E04B9/00, F21V33/00, F21W131/205, F21V21/14, F21W131/202, F21Y115/10, A61B90/35.
Techo de flujo de aire laminar para una sala de operaciones, que comprende
una cámara definida por una pared horizontal superior , una pared horizontal inferior , y cuatro paredes laterales ,
y una pluralidad de lámparas dispuestas sustancialmente dentro de dicha cámara, en el que las lámparas comprenden
un primer módulo ,
un segundo módulo conectado al primer módulo y que puede girar respecto al primer módulo a lo largo de un primer eje ,
un tercer módulo que comprende uno o más elementos emisores de luz, estando conectado el tercer módulo al segundo módulo y giratorio respecto al segundo módulo a lo largo de un segundo eje,
siendo el segundo eje sustancialmente perpendicular al primer eje.
PDF original: ES-2679321_T3.pdf
Pinzas para cirugía laparoscópica mínimamente invasiva.
(02/11/2017) Pinzas para cirugía laparoscópica mínimamente invasiva, que comprenden:
- unas garras montadas en un cuerpo giratorio
- un cuerpo principal ,
- primeros medios de transmisión del movimiento de las garras y
- segundos medios de transmisión del movimiento del cuerpo giratorio ,
comprendiendo, respectivamente, dichos primeros y segundos medios de transmisión por lo menos un tendón formados cada uno por varios cables que están dispuestos de manera que la sección transversal de por lo menos un tendón asociado a los primeros medios de transmisión del movimiento presenta una geometría variable (A, B, C) a lo largo de su recorrido por el interior de dicho cuerpo principal ;
caracterizadas por el hecho de que las pinzas comprenden unos módulos de…
Sistema robótico para cirugía laparoscópica.
Sección de la CIP Necesidades corrientes de la vida
(13/09/2017). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: A61B34/30, A61B34/37.
Comprende una estructura de soporte donde se acopla de manera deslizante al menos un brazo . Cada brazo comprende un primer y un segundo elemento articulados entre sí. El primer elemento está articulado de manera giratoria en la estructura de soporte y puede girar alrededor de un eje longitudinal (L1) y el segundo elemento puede recibir una articulación de por lo menos dos grados de libertad para el acoplamiento de una herramienta . El eje longitudinal (L1) del primer elemento es substancialmente perpendicular a un eje de articulación (L2) del primer elemento y el segundo elemento . Se obtiene una arquitectura simplificada que permite un movimiento espacial preciso y eficaz de la herramienta que sujeta el brazo.
PDF original: ES-2655029_T3.pdf
(01/01/2014) Lámpara que comprende:
un primer módulo para unirse a un elemento de techo o pared;
un segundo módulo conectado al primer módulo y que puede girar respecto al primer módulo a lo largo de un primer eje ,
un tercer módulo que comprende uno o más elementos emisores de luz, estando conectado el tercer módulo al segundo módulo y giratorio respecto al segundo módulo a lo largo de un segundo eje, siendo el segundo eje sustancialmente perpendicular al primer eje,
en el que dicho primer módulo comprende un primer motor que tiene un primer eje de salida con un primer engranaje,
engranando dicho primer engranaje con un engranaje dispuesto en el…
SISTEMA DE VISIÓN PARA EL CONTROL DE OCUPACIÓN DE VEHÍCULOS EN UNA ESTACIÓN DE PEAJE.
(08/02/2013) La presente invención permite el control automático de ocupación de vehículos en una estación de peaje. Dicho sistema automático comprende medios para la adquisición de imágenes de un vehículo a controlar, medios para el tratamiento de las imágenes adquiridas y la detección de caras dentro del vehículo y su conteo. Según el número de ocupantes validadas, se procede a aplicar un descuento en el peaje.
SISTEMA DE PREDICCIÓN DE FALLOS EN REDES FERROVIARIAS.
(29/01/2013) Sistema de predicción de fallos en redes ferroviarias.
Se describe un sistema de predicción de fallos en redes de vehículos que se desplazan sobre raíles, dicho sistema hace uso de varios tipos de sensores que captan datos referidos a diversos parámetros que son procesados y enviados para desarrollar un análisis de los mismos y determinar y prever posibles fallos en la red.
SISTEMA DE VISIÓN PARA EL CONTROL DE OCUPACIÓN DE VEHÍCULOS EN UNA ESTACIÓN DE PEAJE.
Sección de la CIP Física
(10/01/2013). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: G06K9/00, G06K9/20, G06T7/00, G06K9/62, G06Q50/30.
La presente invención permite el control automático de ocupación de vehículos en una estación de peaje. Dicho sistema automático comprende medios para la adquisición de imágenes de un vehículo a controlar, medios para el tratamiento de las imágenes adquiridas y la detección de caras dentro del vehículo y su conteo. Según el número de ocupantes validadas, se procede a aplicar un descuento en el peaje.
PINZAS PARA CIRUGIA LAPAROSCÓPICA MÍNIMAMENTE INVASIVA.
(19/10/2012) Pinzas para cirugía laparoscópica mínimamente invasiva.
Comprenden unas garras montadas en un cuerpo giratorio , primeros medios y segundos de transmisión del movimiento de las garras y el cuerpo giratorio , respectivamente, que comprenden respectivamente al menos un tendón formado por varios cables dispuestos de manera que la sección transversal de por lo menos el tendón asociado a los primeros medios de transmisión presenta una geometría variable (A, B, C) a lo largo del mismo formada por una primera disposición (A) en la que los cable están dispuestos, en sección transversal, con sus ejes longitudinales en una distribución radial (A), una segunda disposición (B) en la que dichos ejes…
SISTEMA ROBÓTICO PARA CIRUGIA LAPAROSCÓPICA.
(05/10/2012) Sistema robótico para cirugía laparoscópica.
Comprende una estructura de soporte donde se acopla de manera deslizante al menos un brazo . Cada brazo comprende un primer y un segundo elemento articulados entre sí. El primer elemento está articulado de manera giratoria en la estructura de soporte y puede girar alrededor de un eje longitudinal (L1) y. el segundo elemento puede recibir una articulación de por lo menos dos grados de libertad para el acoplamiento de una herramienta . El eje longitudinal (L1) del primer elemento es substancialmente perpendicular a un eje de articulación (L2) del primer elemento y el segundo elemento .
Se…
(19/04/2012) Brazo poliarticulado.
La invención se refiere a un brazo poliarticulado en un plano , que comprende un primer elemento , un segundo elemento y un tercer elemento articulados sucesivamente mediante articulaciones , que definen su dirección longitudinal , en el que el primer elemento y el tercer elemento están articulados entre sí por un vástago mediante dos articulaciones situadas cada una a proximidad de la articulación de cada uno de dichos elementos con el segundo elemento y en dirección perpendicular a la dirección longitudinal los elementos primero y tercero y estando dichas dos…
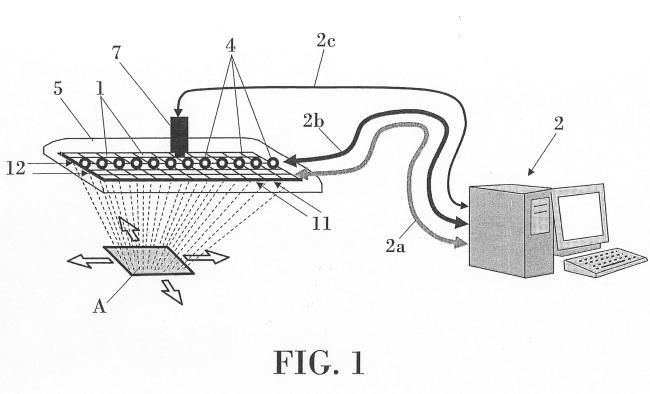
SISTEMA DE ILUMINACION, INSTALACION PARA UNA INTERVENCION QUIRURGICA, Y METODO DE ILUMINACION DE UNA MESA DE OPERACIONES EN UN QUIROFANO.
Secciones de la CIP Electricidad Mecánica, iluminación, calefacción, armamento y voladura Física
(01/04/2008). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA
CORPORACION SANITARIA PARC TAULI. Clasificación: H05B37/02, F21V23/00, G05D25/00, F21S8/00R2M, F21S8/00.
Sistema de iluminación, instalación para una intervención quirúrgica, y método de iluminación de una mesa de operaciones en un quirófano.#El sistema de iluminación comprende una pluralidad de elementos emisores de luz dispuestos en una matriz que comprende una pluralidad de filas y de columnas de dichos elementos . Los elementos están configurados para permitir el control individual de la emisión de luz desde cada uno de dichos elementos , con un sistema electrónico de control . Una pluralidad de los elementos están agrupados en grupos que cada uno comprende una pluralidad de dichos elementos , y cada uno de los grupos está asociado a medios de orientación configurados para orientar la luz emitida por los elementos del grupo en una dirección deseada, bajo el control del sistema electrónico de control . La invención también se refiere a una instalación para una intervención quirúrgica, y a un método de iluminación de una mesa de operaciones en un quirófano.
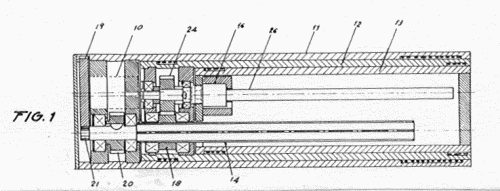
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/2001). Ver ilustración. Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Clasificación: B25J18/02.
El brazo robot retráctil preconizado está constituido por tres elementos, que consiguen con su desplazamiento axial un dispositivo retráctil que se caracteriza según es el primer objeto de la invención por la elevada relación existente entre su longitud máxima y su longitud mínima, lo que minimiza el espacio ocupado, ya que mientras que en posición extendida puede considerarse que ocupa una longitud "L", en posición recogida ocupa una longitud L/3, con lo que se logra que permitiendo la misma longitud trabajante del brazo cuando el mismo se encuentra en situación extendida, cuando se recoge ocupe una longitud L/3 en vez de L/2.
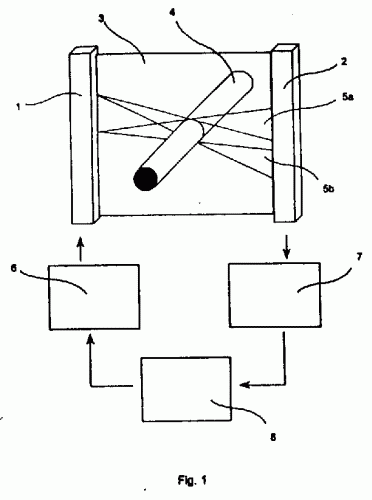
SISTEMA DE DETECCION DE PRESENCIA DE OBJETOS.
Sección de la CIP Física
(01/01/2001). Ver ilustración. Solicitante/s: MAPS INFORMATICA INDUSTRIAL S.L. AUTOPISTAS CONCESIONARIA ESPAÑOLA, S.A. Clasificación: G01V8/20, G08G1/065.
Sistema de detección de presencia de objetos compuesto por un dispositivo emisor de radiación electromagnética y un dispositivo receptor de dicha radiación electromagnética donde el dispositivo emisor emite una serie de haces de radiación electromagnética que recorren un plano , que se solapan por lo menos parcialmente, y que son emitidos sucesivamente en forma de impulsos, los cuales inciden sobre el dispositivo receptor que envía la información sobre las señales recibidas en un instante dado a una unidad de control, que compara dicha información sobre las señales recibidas en un instante dado con la información sobre las señales recibidas en ausencia de objetos que interfieran con dichos haces de ondas electromagnéticas y analiza dicha comparación para determinar si hay presencia o no de un objeto en dicho plano de detección.
{kind=link}
{kind=link}
{kind=link}
{kind=link}