Sistema y procedimientos para formar pilas.
Procedimiento para formar pilas de capas de paquetes caracterizado por:
proporcionar un dispositivo de sujeción (100) acoplado a un brazo robótico móvil (32), comprendiendo elaparato de sujeción un primer conjunto de sujeción (120) y un segundo conjunto de sujeción (130),configurándose el primer conjunto de sujeción para sujetar uno o más primeros paquetes yconfigurándose el segundo conjunto de sujeción para sujetar uno o más segundos paquetes, yconfigurándose los conjuntos de sujeción primero y segundo (120, 130) de tal manera que los paquetesprimero y segundo sujetados de este modo se pueden reorientar entre sí;
recuperar a partir de una primera ubicación de uno o más primeros paquetes con el primer conjunto desujeción (120) y uno o más segundos paquetes con el segundo conjunto de sujeción;
transportar los paquetes primero y segundo hasta una segunda ubicación en la que, durante eltransporte de los paquetes primero y segundo, los paquetes primero y segundo se reorientan entre sí; ydepositar los paquetes primero y segundo en una posición seleccionada en la segunda ubicación paraformar por lo menos una capa parcial de una pila en capas de paquetes.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2010/042155.
Solicitante: J&L Group International, LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3090 STAGECOACH ROAD KEITHVILLE, LA 71047 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WARD,CHRISTOPHER, GENDREAU,CRAIG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
- B65G47/90 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
- B65G61/00 B65G […] › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
PDF original: ES-2434792_T3.pdf
Fragmento de la descripción:
Campo de la invención La presente invención se refiere a sistemas y procedimientos para la formación automática de pilas de capas de objetos empaquetados. Más particularmente, la presente descripción se refiere a sistemas y procedimientos para orientar y posicionar una pluralidad de objetos agrupados durante el transporte desde una primera ubicación hasta una segunda ubicación para formar pilas de capas de objetos empaquetados.
Antecedentes Los fabricantes de productos de papel plisado, tales como cajas de cartón corrugado, bandejas y láminas onduladas planas, disponen normalmente sus productos en paquetes. Los paquetes se disponen en capas, o niveles, y se apilan verticalmente para formar cargas del producto para el transporte a los clientes. Para facilitar la estabilidad de la carga, los paquetes que comprenden cada capa se disponen a menudo siguiendo una pauta tal que por lo menos uno de los paquetes se gira 90 grados con respecto a los otros paquetes de la capa. La carga se apila normalmente sobre un palé y se atan entre sí para facilitar la manipulación de la carga.
Se han desarrollado diversos sistemas para formar cargas. En particular, en un sistema, se transportan paquetes de uno en uno mediante un dispositivo de transporte que puede girar el paquete durante el transporte hasta una zona de acumulación de pilas y disponerlo en una pila en la posición pretendida. En un sistema adicional, antes de la recuperación mediante un dispositivo de transporte, un dispositivo de acondicionamiento orienta los paquetes en la posición pretendida. El paquete se transporta a continuación en dicha posición hasta una zona de acumulación de pilas. En otros sistemas adicionales, se utiliza una pluralidad de dispositivos de acondicionamiento para orientar diversos paquetes en una capa o capa parcial antes de la recuperación mediante un dispositivo de transporte. La capa o capa parcial se transporta a continuación hasta una zona de acumulación de pilas.
El documento EP0511529 da a conocer una paletizadora (15) que retira cajas de cartón (11, 12) desde el transportador de alimentación (13, 14) mediante un cabezal de aspiración (27) y, desplazándose arriba y abajo y de un lado a otro, las deposita en el palé (10) . Para aumentar el rendimiento de trabajo, la máquina paletizadora (15) , presenta dos brazos articulados (16, 17) que funcionan independientemente entre sí y que cargan conjuntamente cajas de cartón (11, 12) en un palé (10) . De este modo, aumenta la producción de trabajo de la máquina paletizadora (15) para una velocidad de funcionamiento determinada de los brazos articulados (16, 17) .
Hasta el momento, no se ha desarrollado sistema alguno para la recuperación de una pluralidad de paquetes y la reorientación de los paquetes entre sí durante el transporte de los paquetes hasta una zona de acumulación de pilas.
Breve resumen de la invención En una forma de realización, un procedimiento puede comprender proporcionar un aparato de sujeción que comprende un primer conjunto de sujeción y un segundo conjunto de sujeción. El primer conjunto de sujeción se puede configurar para sujetar uno o más primeros paquetes y el segundo conjunto de sujeción se puede configurar para sujetar uno o más segundos paquetes. Los conjuntos de sujeción primero y segundo se pueden configurar de tal modo que los paquetes primeros y segundos captados de este modo se puedan reorientar entre sí. El procedimiento puede comprender además la recuperación a partir de una primera ubicación de uno o más primeros paquetes con el primer conjunto de sujeción y uno o más segundos paquetes con el segundo conjunto de sujeción, transportándose los paquetes primero y segundo hasta una segunda ubicación y durante el transporte de los paquetes primero y segundo, los paquetes primero y segundo se reorientan entre sí, y se depositan los paquetes primero y segundo en una posición seleccionada en la segunda ubicación para formar por lo menos una capa parcial de una pila en capas de paquetes.
Breve descripción de los dibujos Aunque la presente memoria finaliza con reivindicaciones que indican particularmente y reivindican claramente el tema que se considera que constituye la presente invención, se prevé que la presente invención se comprenderá mejor a partir de la descripción siguiente considerada junto con las figuras adjuntas, en las que:
La figura 1 es una vista en perspectiva de una pila de paquetes individuales.
La figura 2 es un esquema de un ejemplo de entorno de sistema para realizar los sistemas y procedimientos de la presente descripción.
La figura 3 es una vista isométrica de un robot apto para cargar paquetes en pilas de capas según algunas formas de realización.
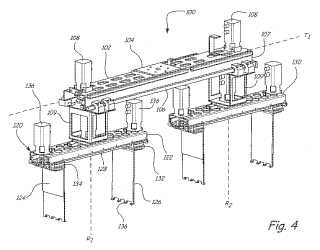
La figura 4 es una vista isométrica de un aparato de sujeción según algunas formas de realización.
La figura 5 es una vista isométrica de un aparato de sujeción según algunas formas de realización.
La figura 6 es un diagrama de flujo que representa un proceso de transporte de paquetes según algunas formas de realización.
La figura 7 es un esquema de una pauta de capa que puede estar constituida según algunas formas de realización.
La figura 8 es un esquema de una pauta de capa que puede estar constituida según algunas formas de realización.
La figura 9 es un esquema de una pauta de capa que puede estar constituida según algunas formas de realización.
La figura 10 es un esquema de una pauta de capa que puede estar constituida según algunas formas de realización.
Descripción detallada La presente invención se refiere a sistemas y procedimientos para la formación automática de pilas de capas de objetos empaquetados. Más particularmente, la presente descripción se refiere a sistemas y procedimientos para orientar y posicionar una pluralidad de objetos agrupados durante el transporte desde una primera ubicación hasta una segunda ubicación para formar pilas de capas de objetos empaquetados.
Los sistemas y procedimientos que se dan a conocer en la presente memoria los pueden utilizar, por ejemplo, los fabricantes de productos de papel plisado para disponer más eficientemente los paquetes de productos en pilas de capas. Por ejemplo, los sistemas y procedimientos descritos en la presente memoria pueden aumentar la velocidad con la que se forman las pilas, así como disminuir el espacio ocupado en general por la maquinaria necesario para producir las pilas.
La figura 1 es una vista en perspectiva de una pila S de paquetes individuales B, de un tipo que se puede formar utilizando los sistemas y procedimientos descritos en la presente memoria. Tal como se representa, los paquetes B se juntan en grupos que forman niveles o capas individuales L, dispuestos sucesivamente uno sobre el otro para formar la pila S. Las capas L se definen mediante una disposición de paquetes individuales B en la que por lo menos un paquete de B se puede girar con respecto a los otros paquetes de una capa de L. Se puede hacer referencia a la disposición de los paquetes B, que comprenden una capa L como pauta de capa. Cuando se forma la pila S, pueden variar las pautas de capa, por ejemplo alternando las pautas de capa en las capas adyacentes. Tal como reconocerán los expertos en la materia, la disposición empaquetada de este modo puede aumentar la estabilidad de la pila S. Cabe indicar que la capa y las pautas de pila representadas en la figura 1 se proporcionan únicamente a título de ilustración y que cualquier capa o pauta de pila pretendida se encuentra dentro del alcance de la presente invención.
La figura 2 representa un ejemplo de entorno de sistema 10 para realizar los sistemas y procedimientos de la presente invención. El entorno de sistema 10 puede comprender un transportador de paquetes 20 que presenta un acondicionador de paquetes asociado 22 y una zona de captación de paquetes 24, un robot 30 conectado funcionalmente a un control de robot 31 y un transportador de pilas 40 que presenta una zona de acumulación de pilas asociada 42.
En algunas formas de realización, el transportador de paquetes 20 se puede configurar y accionar para transferir paquetes de material a través del acondicionador de paquetes 22 y hacia la zona de captura de paquetes para que el robot 30 recupere los mismos. En una aplicación, los paquetes pueden comprender hojas de papel o de material corrugado de una longitud y una anchura seleccionadas apiladas en paquetes de una altura seleccionada. Alternativamente, los paquetes pueden comprender cualquier objeto apilable, tal como, por ejemplo, cajas, cajones, bolsas, fardos, pilas separadas de artículos, productos individuales y similares.
En diversas formas de realización, el acondicionador de paquetes 22 puede orientar uno o más paquetes en... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para formar pilas de capas de paquetes caracterizado por:
proporcionar un dispositivo de sujeción (100) acoplado a un brazo robótico móvil (32) , comprendiendo el aparato de sujeción un primer conjunto de sujeción (120) y un segundo conjunto de sujeción (130) , configurándose el primer conjunto de sujeción para sujetar uno o más primeros paquetes y configurándose el segundo conjunto de sujeción para sujetar uno o más segundos paquetes, y configurándose los conjuntos de sujeción primero y segundo (120, 130) de tal manera que los paquetes primero y segundo sujetados de este modo se pueden reorientar entre sí; recuperar a partir de una primera ubicación de uno o más primeros paquetes con el primer conjunto de sujeción (120) y uno o más segundos paquetes con el segundo conjunto de sujeción; transportar los paquetes primero y segundo hasta una segunda ubicación en la que, durante el transporte de los paquetes primero y segundo, los paquetes primero y segundo se reorientan entre sí; y
depositar los paquetes primero y segundo en una posición seleccionada en la segunda ubicación para formar por lo menos una capa parcial de una pila en capas de paquetes.
2. Procedimiento para formar pilas de paquetes según la reivindicación 1, en el que la reorientación de los paquetes primero y segundo entre sí comprende girar uno o ambos paquetes primero y segundo entre sí 20 alrededor de uno o más ejes verticales (R1, R2) .
3. Procedimiento para formar pilas de paquetes según la reivindicación 2, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar uno o ambos paquetes primero y segundo entre sí sobre en un plano de traslación.
4. Procedimiento para formar pilas de paquetes según la reivindicación 3, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar uno o ambos paquetes primero y segundo entre sí sobre en por lo menos dos direcciones del plano de traslación, siendo las por lo menos dos direcciones sustancialmente perpendiculares entre sí.
5. Procedimiento para formar pilas de paquetes según la reivindicación 1, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar uno o ambos paquetes primero y segundo entre sí sobre en un plano de traslación.
6. Sistema para formar pilas de capas de paquetes que comprende:
un primer transportador configurado para la transferencia de paquetes a una zona de captación de paquetes (24) ; un segundo transportador configurado para la transferencia de pilas de capas de paquetes desde una zona de acumulación de pilas (42) ; un robot (30) que comprende un brazo móvil (32) configurado para el transporte de paquetes desde la zona de captación de paquetes (24) hasta la zona de acumulación de pilas (42) ; un dispositivo de sujeción (100) acoplado a un brazo móvil (32) , comprendiendo el aparato de sujeción (100) un primer conjunto de sujeción (120) y un segundo conjunto de sujeción (130) , configurándose el
primer conjunto de sujeción (120) para sujetar uno o más primeros paquetes de la zona de captación de paquetes y configurándose el segundo conjunto de sujeción (130) para sujetar uno o más segundos paquetes de la zona de captación de paquetes (24) ; y en el que los conjuntos de sujeción primero y segundo (120, 130) se pueden configurar de tal modo que los paquetes primeros y segundos captados de este modo se puedan reorientar entre sí durante el
transporte de los paquetes desde la zona de captación de paquetes (24) hasta la zona de acumulación de paquetes (42) .
7. Sistema para formar pilas de paquetes según la reivindicación 6, en el que la reorientación de los paquetes primero y segundo entre sí comprende girar uno o ambos paquetes primero y segundo entre sí alrededor de 55 uno o más ejes verticales.
8. Sistema para formar pilas de paquetes según la reivindicación 7, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar uno o ambos paquetes primero y segundo entre sí sobre en un plano de traslación.
9. Sistema para formar pilas de paquetes según la reivindicación 8, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar los paquetes primero y segundo entre sí sobre en por lo menos dos direcciones del plano de traslación, siendo las por lo menos dos direcciones sustancialmente perpendiculares entre sí.
10. Sistema para formar pilas de paquetes según la reivindicación 6, en el que la reorientación de los paquetes primero y segundo entre sí comprende desplazar uno o ambos paquetes primero y segundo entre sí sobre en un plano de traslación.
11. Aparato de sujeción (100) para un sistema según cualquiera de las reivindicaciones 6 a 10, que comprende:
un elemento alargado (102) ; un primer conjunto de sujeción (120) acoplado de un modo móvil al elemento alargado (102) de tal modo que el primer conjunto de sujeción se puede trasladar a lo largo de una dimensión longitudinal del
elemento alargado (102) y puede girar con respecto al elemento alargado (102) , comprendiendo el primer conjunto de sujeción (120) una primera estructura alargada (122) que presenta uno o más primeros elementos de sujeción (124) acoplados de un modo móvil a la primera estructura (122) ; un segundo conjunto de sujeción (130) acoplado de un modo móvil al elemento alargado (102) de tal modo que el segundo conjunto de sujeción (130) se puede trasladar a lo largo de la dimensión longitudinal del elemento alargado (102) , comprendiendo el segundo conjunto de sujeción (130) una segunda estructura alargada que presenta uno o más primeros elementos de sujeción (126) acoplados de un modo móvil a la segunda estructura, pudiendo girar el segundo conjunto de sujeción (130) con respecto al elemento alargado (102) y uno o más primeros sistemas de accionamiento acoplados a uno o ambos conjuntos de sujeción primero y segundo (120, 130) para accionar el movimiento de traslación de las sujeciones primera y segunda; y uno o más segundos sistemas de accionamiento acoplados a una o ambas sujeciones primera y segunda para accionar el movimiento de rotación de los conjuntos de sujeción primero y segundo.
12. Conjunto de sujeción según la reivindicación 11, en el que las sujeciones primera y segunda (120, 130) se acoplan al elemento alargado (102) de tal modo que las estructuras primera y segunda se suspenden axialmente debajo del elemento alargado (102) .
13. Conjunto de sujeción según la reivindicación 12, en el que las sujeciones primera y segunda se extienden en el 30 mismo plano o en planos paralelos.
14. Conjunto de sujeción según la reivindicación 11, en el que la primera sujeción (120) comprende un par de elementos de sujeción opuestos acoplados a la primera sujeción de tal modo que los elementos de sujeción se pueden trasladar a lo largo de la dimensión longitudinal de la primera estructura.
15. Conjunto de sujeción según la reivindicación 11, en el que el uno o más primeros sistemas de accionamiento se configuran de tal modo que por lo menos una de las sujeciones primera y segunda (120, 130) se puede trasladar independientemente o girar independientemente entre sí.
Patentes similares o relacionadas:
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Manipulación y aireación automáticas de una pila de hojas de papel, del 8 de Julio de 2020, de GRAPHIC ROBOTICS APS: Método de manipulación y de aireación de una pila de trabajo de hojas de papel rectangulares en conexión con el uso de las hojas de papel en un centro de 5 impresión, […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]