Sistema y método de localización y cartografía de activos enterrados.
Sistema y método de localización y cartografía de servicios enterrados que combina la adquisición simultánea de una matriz de antenas de georradar (1) (GPR,
Ground Penetrating Radar) que está configurada para posicionar los objetos enterrado y visualizarlos en un espacio tridimensional, así como una matriz de sensores de inducción electromagnética (2) (EMI, electromagnetic induction) que está configurada para localizar y diferenciar las líneas con corriente eléctrica o las líneas con un núcleo conductor, tal como los cables para suministro eléctrico o de comunicaciones.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201430309.
Solicitante: XPRESA GEOPHYSICS S.L.
Nacionalidad solicitante: España.
Inventor/es: COLL QUINTA,Miquel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01V11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › Prospección o detección por métodos que combinan técnicas cubiertas por dos o más de los grupos principales especificadas en los grupos G01V 1/00 - G01V 9/00.
Fragmento de la descripción:
El objeto de la presente invención es un sistema de localización y cartografía de servicios enterrados que combina la adquisición simultánea de una matriz de antenas de georradar (GPR, Ground Penetrating Radar) que está configurada para posicionar los objetos enterrado y visualizarlos en un espacio tridimensional, así como una matriz de sensores de inducción electromagnética (EMI, electromagnetic induction) que está configurada para localizar y diferenciar las líneas con corriente eléctrica o las líneas con un núcleo conductor, tal como los cables para suministro eléctrico o de comunicaciones.
La presente invención está dirigida a la mejora de los sistemas y métodos de cartografía de los servicios públicos del subsuelo. La presente invención también está dirigida a sistemas y métodos que permitan definir la naturaleza de los servicios públicos subterráneos.
Estado de la técnica
El georradar es usado en multitud de áreas como, por ejemplo, en búsquedas arqueológicas, obra civil, minería y en la detección de minas antipersonas. Esta técnica ofrece un método rápido y no destructivo para el mapeado y análisis del subsuelo desde una profundidad centimétrica hasta centenares de metros. El georradar se basa en la emisión y recepción de pulsos electromagnéticos entre el rango de frecuencias de los 10 MHz y 5 GHz, donde los pulsos son emitidos y recibidos por antenas que escuchan los reflejos producidos en los contactos entre diferentes materiales con diferente permitividad dieléctrica.
Durante las últimas dos décadas el georradar ha sido cada vez más utilizado como parte de un arsenal de herramientas para localizar y automatizar la cartografiar de los servicios públicos enterrados, tal y como se describe en [Al-Nuaimy, W., Y. Huang, M. Nakhkash, M.T.C. Fang, V.T. Nguyen, A. Eriksen. (2000): "Automatic detection oí buried Utilities and solid objects with GPR using neural networks and pattern recognition". Journal of Applied Geophysics, 43, 157-165\ o en [Simi, A., S. Bracciali, G. Manacorda (2008): "Hough transform based automatic pipe detection for array GPR: Algorithm development and on-site tests". Radar Conference. RADAR '08. !EEE\.
La metodología utilizada actualmente incluye la creación de una malla ortogonal de perfiles de georradar más la radiación de las tapas de inspección para su posicionamiento y el seguimiento de líneas con corriente mediante localizadores de radio frecuencia. Finalizada la adquisición, cada perfil de georradar es analizado buscando hipérbolas de difracción, estas son producidas por objetos puntuales con una permitividad dieléctrica diferente al material que los rodea, usualmente se identifican como servicios enterrados. En la figura 1 se muestra como se generan estas geometrías hiperbólicas a partir de un objeto puntual. Estos objetos puntuales son posicionados y visualizados en planta para determinar la posible trayectoria de los servicios.
Posiblemente parte de las hipérbolas detectadas representan servicios enterrados, sin embargo, estas heterogeneidades pueden proceder de otros objetos del subsuelo como raíces, cavidades, cimentaciones, o cualquier otra similar. Así pues, las trayectorias de los servicios delineados con esta metodología poseen un alto nivel de interpretación subjetiva que resuelve la presente invención.
La solución a esta problemática es la adquisición de datos 3D de georradar en resolución completa [Grasmueck, M., R. Weger, and H. Horstmeyer (2005): "Full-resolution 3D GPR imaging". Geophysics, 70 (1), K12-K19\ con el objetivo de visualizar directamente la trayectoria de los servicios en planta. La interpretación de los datos de georradar es más real cuando se dispone de esta imagen tridimensional, ya que esta permite ver la geometría real de los objetos del subsuelo, sin interpolación. De esta forma se pueden delinear los diferentes objetos o superficies que se encuentran en el subsuelo.
Estas imágenes tridimensionales se construyen a partir de la adquisición de varios perfiles equi-espaciadamente paralelos (C-SCAN) donde las trazas tienen que estar equiespaciadas entre ellas en los ejes de abscisas y coordenadas X e Y no más de 1A de la longitud de onda del pulso emitido por la antena en el subsuelo. El motivo de que esta metodología no se haya implantado en la cartografía de servicios es su alto coste en tiempo y, por lo tanto, su elevado coste económico.
Los fabricantes de antenas de georradar han estado desarrollando soluciones multicanal, como los equipos con matrices de antenas, para agilizar esta adquisición (destacan los
sistemas STREAM® de IDS, GeoScope® de 3Dradar, Terravision® de GSSI o MIRA® de
MALÁ GeoScience). Estos equipos son grandes, pesados y su uso se limita a grandes superficies libres de obstáculos como campos o carreteras. Su peso y tamaño necesitan de un vehículo motorizado para moverlos, lo que no permite el movimiento ágil entre el mobiliario urbano de las ciudades, lugares donde está la mayor densidad de servicios enterrados. Estos equipos tampoco permiten diferenciar entre servicios eléctricos, metálicos sin corriente y no metálicos.
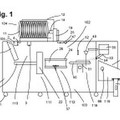
Otra técnica utilizada para la detección de servicios son los radiolocalizadores, también comúnmente conocidos como localizadores electromagnéticos, que son equipos que disponen de sensores EMI. En general, estos equipos son descritos como equipos de detección y rastreo de cables con núcleo metálico que basan su funcionamiento en los principios de la inducción electromagnética. Estos equipos rastrean los campos electromagnéticos inducidos por los cables con corriente a frecuencias de 50-60Hz. No obstante, estos equipos también aportan la posibilidad de inducir otra corriente alterna a diferente frecuencia con un equipo transmisor o mediante fuentes electromagnéticas externas al equipo como, por ejemplo, ondas de radio. En la figura 2 se ilustra el funcionamiento de estos equipos.
En la actualidad, existen otros instrumentos que integran un georradar (GPR) y sensores EMI, como el descrito en el documento WO2012042307 que describe un equipo con interfaz gráfica aplicado a la detección de minas antipersonas. No obstante, este equipo, igual que los radiolocalizadores y georradares tradicionales, está pensado estrictamente para la detección de anomalías en tiempo real, como las hipérboles de reflexión originadas por un objeto puntual. El problema técnico que presenta esta metodología es que no permite diferenciar una tubería de una mina antipersona ya que, para identificar correctamente la anomalía, se hace necesario reconstruir la imagen tridimensional con resolución completa, como propone la presente invención.
Otro equipo que integra sensores EMI y GPR es el descrito en el documento US7113124. Este equipo tiene como objetivo detectar y rastrear en tiempo real los servicios enterrados, de forma similar a la forma descrita en el documento WO2012042307, pero con la presencia de unos sensores inerciales gracias a los cuales puede posicionar las anomalías detectadas. Así pues, en este documento se realiza una malla 2D de perfiles que permite obtener un mapa en planta de anomalías de georradar, hipérboles de reflexión, posible servicios, raíces o
heterogeneidades puntuales como piedras, y que posteriormente son unidas mediante
interpolación por el propio usuario. Con el posicionamiento de los datos, este equipo permite una mayor aproximación a la realidad, pero la metodología utilizada no permitirá obtener una imagen tridimensional real por problemas de precisión en el posicionamiento y por su baja productividad.
Los equipos comentados anteriormente usan una metodología de detección y rastreo en tiempo real, a diferencia de la metodología propuesta en el documento WO2002033443, donde se describe una metodología de detección y cartografía de servicios públicos subterráneos, así como la distribución en formato electrónico de los datos de mapeo para los usuarios suscriptores. No obstante, este equipo y metodología fallan en describir un equipo y una metodología que permite adquirir datos tridimensionales de georradar en resolución completa y mapas de intensidad electromagnética de los servicios con corriente de forma simultánea, usando matrices de sensores que permitan incrementar por diez la productividad la recogida de datos respecto los equipos tradicionales, tal y como es el objeto de la presente invención. Este último documento tampoco describe una metodología para la interpretación automática conjunta entre los dos tipos de datos adquiridos que permite aumentar drásticamente la productividad para la creación de la cartografía de servicios enterrados, metodología ésta que si queda reflejada en la presente invención.
Descripción de la...
Reivindicaciones:
1 - Sistema de localización y cartografía de activos enterrados que comprende:
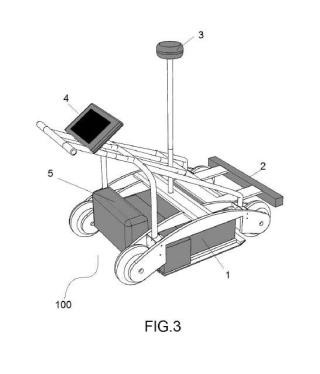
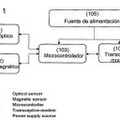
una matriz de antenas de radar de penetración de suelo (1); una matriz de sensores vectoriales de campo magnético (2); y un sistema de posicionamiento (3) caracterizado por que
dichos elementos están situados en un vehículo (100) de tal forma que la matriz de georradar (1) está dispuesta en la parte inferior del vehículo (100) y en paralelo al suelo, y donde los canales de adquisición están separados en la dirección perpendicular al avance del propio vehículo (100) con una separación máxima entre canales de un cuarto de la longitud de onda de la frecuencia central emitida;
y donde la matriz de sensores electromagnéticos vectoriales (2) registra una serie temporal de banda ancha configurada para medir la intensidad de los campos magnéticos en las componentes (X, Y, Z) entre las frecuencias de 50Hz a 200KHz.
2 - El sistema de la reivindicación 1 donde la matriz de georradar (1) está dispuesta en una plataforma regulable en altura para ajustar al máximo la distancia de la matriz de georradar (1) con el suelo.
3 - El sistema de acuerdo con cualquiera de las reivindicaciones anteriores donde el sistema de posicionamiento global o local (3) tiene una precisión de 1/8 de la longitud de onda de la frecuencia central emitida.
4 - El sistema de acuerdo con cualquiera de las reivindicaciones anteriores donde la matriz de antenas de radar de penetración de suelo (1) comprende al menos un módulo que comprende cuatro dipolos HH configurados para visualizar los servicios enterrados perpendiculares a la trayectoria del sistema y dieciséis dipolos VV configurados para obtener una imagen tridimensional en resolución completa.
- El sistema de acuerdo con cualquiera de las reivindicaciones anteriores que está integrado en un vehículo (100) de tal forma que la matriz de antenas de radar (1) está dispuesta en paralelo a ras de suelo, mientras que en su parte frontal se monta una estructura donde se sitúan tres sensores vectoriales de campo magnético y uno a una determinada altura
configurado para estimar la profundidad de la detección.
6 - El sistema de acuerdo con la reivindicación 5 donde la matriz de antenas de radar está dispuesta en paralelo a ras de suelo sobre una plataforma ajustable en altura.
7 - El sistema de acuerdo con cualquiera de las reivindicaciones anteriores donde el sistema
de posicionamiento (3) comprende un DGPS situado en el centro de masas del vehículo (100).
8 - El sistema de acuerdo con cualquiera de las reivindicaciones anteriores que comprende un odómetro.
9 - El sistema de acuerdo con cualquiera de las reivindicaciones anteriores que comprende un PC táctil (4) conectado con los sensores (1,2, 3) del sistema.
- Método de localización y cartografía de activos enterrados que comprende las etapas de:
a) Adquisición del área de escaneo mediante la ayuda de un sistema de posicionamiento (3) que, con los datos de posición, guía al equipo para que las matrices de sensores (1,2) registren toda el área objetivo discretizada en un mallado regular de trazas de georradar y valores de intensidad electromagnética.;
b) Enviar a un servidor externo los datos georreferenciados obtenidos;
c) Reconstruir y procesar la imagen tridimensional de georradar en resolución completa en el servidor externo;
d) Identificar y delinear en las tres dimensiones los ápex de las hipérboles de reflexión que tengan continuidad en el espacio dentro de la imagen tridimensional de georradar mediante un algoritmo matemático en el servidor externo; y
e) Cotejar los datos de la imagen tridimensional con el mapa de intensidad electromagnética, integrando la información de ambos en un único mapa.
Patentes similares o relacionadas:
DISPOSITIVO Y PROCEDIMIENTO PARA MEDIR LA ALTURA DE CÚMULOS DE UNA SUSTANCIA EN ENTORNOS FERROVIARIOS, del 16 de Marzo de 2017, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): Se divulga un dispositivo para medir la altura de cúmulos de una sustancia en entornos ferroviarios y su procedimiento de medida asociado. El dispositivo comprende: una […]
DISPOSITIVO Y PROCEDIMIENTO PARA MEDIR LA ALTURA DE CÚMULOS DE UNA SUSTANCIA EN ENTORNOS FERROVIARIOS, del 13 de Marzo de 2017, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): Dispositivo y procedimiento para medir la altura de cúmulos de una sustancia en entornos ferroviarios. Se divulga un dispositivo para medir la altura de cúmulos […]
Vehículo submarino autónomo para la adquisición de datos geofísicos, del 1 de Abril de 2015, de ENI S.P.A.: Un vehículo submarino autónomo equipado para la adquisición del gradiente gravimétrico y magnético cerca del lecho marino, caracterizado porque […]
 MAQUINA DE INSPECCIÓN AUTOMÁTICA Y CONTINUA, del 30 de Mayo de 2014, de ARPO-ROBOTIC SECURITY EQUIPMENT, S.L: Máquina de inspección automática y continua, para la detección de contenidos peligrosos en paquetes y otros envíos postales, y método correspondiente Comprende un […]
MAQUINA DE INSPECCIÓN AUTOMÁTICA Y CONTINUA, del 30 de Mayo de 2014, de ARPO-ROBOTIC SECURITY EQUIPMENT, S.L: Máquina de inspección automática y continua, para la detección de contenidos peligrosos en paquetes y otros envíos postales, y método correspondiente Comprende un […]
Sistema de detección de múltiples peligros, del 25 de Diciembre de 2013, de QYLUR SECURITY SYSTEMS: Aparato para la inspección de un objeto en búsqueda de un artículo peligroso, que comprende: una unidad de pruebas que incluye unas fuentes y/o un equipo […]
Sistema de detección de múltiples peligros, del 21 de Noviembre de 2013, de QYLUR SECURITY SYSTEMS: Sistema para la inspección de un ser humano o un animal con respecto a un artículo peligroso, comprendiendo el sistema: un portal para […]
 Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético, del 8 de Noviembre de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: En la presente invención se describe un método y un aparato de detección continua, no intermitente, de vehículos basado en la detección del cambio brusco […]
Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético, del 8 de Noviembre de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: En la presente invención se describe un método y un aparato de detección continua, no intermitente, de vehículos basado en la detección del cambio brusco […]
MÉTODO Y APARATO PARA DETECTAR CONTINUAMENTE LA PRESENCIA DE VEHÍCULOS CON UN SENSOR ÓPTICO Y UN SENSOR MAGNÉTICO, del 29 de Febrero de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético.En la presente invención se describe un método y un aparato […]