PROCEDIMIENTO PARA LA ESTIMACIÓN DE LA GEOMETRÍA DE ANTENA DE UNA ANTENA LINEAL ACÚSTICA.
Procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica que presenta una pluralidad de hidrófonos (11) alineados uno tras otro a la misma distancia en un cordón,
en el que con un número de formas geométricas de cordón potenciales por medio de un algoritmo evolutivo se determina una forma de cordón óptima como geometría de antena instantánea, caracterizado porque la forma de cordón es descrita por los ángulos (Θi) de hidrófono, donde cada ángulo (Θ i) de hidrófono asociado a un hidrófono (11) se refiere a la posición del hidrófono (11) precedente
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03014693.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ALEMANIA.
Inventor/es: WICKER, KAI, DR., JUNG, OLIVER.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Junio de 2003.
Fecha Concesión Europea: 25 de Agosto de 2010.
Clasificación Internacional de Patentes:
- G01V1/38C
Clasificación PCT:
- G01V1/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › Disposiciones de elementos receptores, p. ej. oscilogramas geofónicos.
- G01V1/38 G01V 1/00 […] › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
Clasificación antigua:
- G01V1/38 G01V 1/00 […] › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica del género definido en el preámbulo de la reivindicación
1.
En un procedimiento conocido de este tipo (“Array Shape Estimation And Target Tracking Using Genetic Algorithm”, UDT de Dr. M. A. Mansour) se describen formas de cordón potenciales de una antena lineal arrastrada en el agua en el espacio de búsqueda por una serie armónica (n) según:
N
Y (X ) =∑an sen(nπx / H ) + bn cos(nπx / H ),
n=1
donde H = L + v·T, L es la longitud de la antena lineal, v la velocidad de arrastre y T el periodo de observación. Los parámetros de la forma de cordón son los coeficientes an y bn. Cuando se emplea el algoritmo evolutivo o genético sobre este enfoque de forma de cordón para la evaluación de la aptitud de las formas de cordón individuales o individuos se recurrirá al índice de directividad de la antena lineal.
Con este procedimiento conocido se determinará entonces con suficiente precisión la geometría de antena instantánea cuando la antena lineal arrastrada, debido al mar de fondo o marejada
o a una menor velocidad de arrastre, realice sólo oscilaciones en torno a su disposición con forma lineal extendida. Si por el contrario el vehículo que arrastra hace maniobras, por ejemplo una modificación del curso de 900 que conduce a una curvatura con forma de arco transitoria de la antena de arrastre, entonces dentro de un lapso de tiempo que se establece con el inicio de la maniobra y termina temporalmente tras el fin de la maniobra, no se obtienen con este enfoque de solución resultados aprovechables que sirvan de aproximación a la geometría real de la antena.
En un procedimiento conocido para la mejora de la precisión de detección de una antena lineal submarina acústica arrastrada (documento DE 30 34 953 A1) para la formación de las características direccionales de la antena lineal en n direcciones de marcación se retardan con exactitud de tiempo de forma conocida las señales recibidas de los hidrófonos en el cordón acústico y son sumadas en fase. Los tiempos de retardo son obtenidos de forma conocida como cociente entre la distancia del hidrófono respectivo desde una recta de referencia alineada perpendicular al eje de la dirección de marcación, esto es el eje de la máxima sensibilidad de la característica direccional, que preferentemente atraviesa el primer o último hidrófono en el cordón acústico y calcula la velocidad del sonido en el agua. Para la determinación de la localización de los hidrófonos individuales éstos son marcados desde un punto de referencia y a partir del ángulo de marcación y la distancia conocida de los hidrófonos consecutivos, que habitualmente es constante, es calculada la posición relativa de las localizaciones de los hidrófonos respecto al punto de referencia. Los hidrófonos son así accionados transitoriamente como emisores de marcación o receptores de marcación y correspondientemente está dispuesto un receptor de marcación o emisor de marcación en el punto de referencia.
En este procedimiento la geometría de la antena, es decir la posición de los hidrófonos individuales, durante la marcha de arrastre incluso en caso de maniobras del vehículo que arrastra, por ejemplo un barco, un submarino o un helicóptero, se detecta con mucha precisión, de manera que son posibles una vigilancia no interrumpida de la región marítima transitada en cuanto a objetivos, así como una detección de objetivos. No obstante, debe contarse con despliegue técnico adicional debido a la instalación de emisores de marcación o receptores de marcación. Un efecto secundario no deseado se produce en este procedimiento porque para marcar los hidrófonos deben ser emitidas activamente las señales de marcación con lo que se eleva la probabilidad de traición respecto a un tercero que localiza pasivamente.
La invención se propone el objeto de indicar un procedimiento del tipo mencionado al principio con el que, en particular en caso de antenas lineales arrastradas, se asegure continuamente incluso durante maniobras de marcha del vehículo de arrastre, una estimación muy buena de la geometría de antena real de la antena lineal.
El objeto se lleva a cabo según la invención por las características de la reivindicación 1.
El procedimiento según la invención tiene la ventaja de que sin instalación de hardware adicional, exclusivamente con los componentes ya existentes para el funcionamiento de la antena lineal y una potencia de cálculo algo ampliada se puede determinar la geometría de antena de la antena lineal en cada instante con suficiente precisión, de manera que en particular un vehículo que arrastre la antena lineal no está obligado a mantener un curso rectilíneo lo más largo posible con el fin de la vigilancia de la región marina en cuanto a objetivos que irradian sonido, sino que sin tener en cuenta la antena lineal extendida determinan su curso en base a las circunstancias que se dan habitualmente en la región marina y así también pueden realizar maniobras de marcha discrecionales y variaciones del curso. En el caso de un funcionamiento de recepción puro para la vigilancia pasiva de la región marina en cuanto a objetivos que irradian sonido, el accionamiento del vehículo de arrastre es la única fuente de ruido que puede ser localizada por terceros. Puesto que de otra forma que en el procedimiento descrito al principio no es realizada marcación de los hidrófonos, se suprime la emisión de ondas sonoras, de manera que un tercero no tiene la posibilidad adicional de una localización y eventualmente clasificación del vehículo.
Si se usa el procedimiento según la invención para la marcación de objetivos que irradien sonido sin otros medios auxiliares se consigue una diferenciación derecha/izquierda en la marcación de un objetivo detectado, es decir se determina, si el objetivo marcado bajo un ángulo de marcación > 00 y < 1800 se sitúa a babor o a estribor. Para ello se necesita que haya en la antena lineal sólo una curvatura pequeña, que por ejemplo en el caso de una antena lineal arrastrada puede ser proporcionada por una breve maniobra del vehículo de arrastre con variación del curso precedente. Esto se basa en que el algoritmo evolutivo o genético según una forma de realización preferida de la invención, emplea el índice de directividad de las características direccionales de las señales de grupo como función objetivo y con ello son formadas continuamente las características direccionales de las formas de cordón. Puesto que las formas de cordón seleccionadas en cada caso que sean mejores en cuanto a aptitud, es decir con los mejores índices de directividad, pueden ser aprovechadas para la generación de los descendientes de otra población, es decir de formas de cordón mejoradas, los objetivos aparentes son suprimidos ya debido a los bajos índices de directividad de las señales de grupo correspondientes.
En caso de un empleo estacionario de la antena lineal para la vigilancia de una zona marítima por el procedimiento según la invención no se impone ningún requisito en el diseño de la antena lineal sobre el fondo del agua. La antena lineal puede simplemente ser descendida al fondo del agua y allí anclada. Una medida de la posición de la antena lineal para determinar la localización de los hidrófonos puede suprimirse, ya que por el empleo del procedimiento según la invención es estimada con seguridad la geometría de antena.
Formas de realización ventajosas del procedimiento según la invención con perfeccionamientos ventajosos y configuraciones de la invención resultan de las otras reivindicaciones.
Según una forma de realización ventajosa de la invención para el valor absoluto del ángulo de hidrófono se permiten sólo valores angulares pequeños para los que el seno del ángulo es aproximadamente igual al valor del ángulo. Por esta limitación a ángulos de hidrófono pequeños, que por ejemplo no son mayores de ±30, se obtiene ya en la fase de inicialización del algoritmo genético una forma de cordón útil que se corresponde con el conformado natural del cordón. Ángulos de hidrófono mayores se presentan menos a menudo por motivo de la rigidez del cordón. Además resulta la ventaja de que por la fijación de un ángulo de hidrófono pequeño puede despreciarse el error que se produce por el hecho de que la distancia entre dos hidrófonos constituye un recorrido recto entre los...
Reivindicaciones:
1. Procedimiento para la estimación de la geometría de antena de una antena lineal submarina acústica que presenta una pluralidad de hidrófonos (11) alineados uno tras otro a la misma distancia en un cordón, en el que con un número de formas geométricas de cordón potenciales por medio de un algoritmo evolutivo se determina una forma de cordón óptima como geometría de antena instantánea, caracterizado porque la forma de cordón es descrita por los ángulos (Θi) de hidrófono, donde cada ángulo
(Θi) de hidrófono asociado a un hidrófono (11) se refiere a la posición del hidrófono (11) precedente.
2.Procedimiento según la reivindicación 1, caracterizado porque el ángulo (Θi) de hidrófono para cada hidrófono (11) está delimitado por las líneas de conexión del hidrófono (11) con el hidrófono (11) precedente por un lado y con el hidrófono (11) posterior por otro lado.
3. Procedimiento según la reivindicación 2, caracterizado porque el ángulo (Θi) de hidrófono presenta un valor absoluto y un signo positivo o negativo dependiendo de si el hidrófono (11) que sigue al hidrófono (11) con el ángulo (Θi) de hidrófono asociado está a un lado o a otro lado de la línea de conexión prolon
gada entre el hidrófono (11) y hidrófono (11) anterior.
4. Procedimiento según una de las reivindicaciones 1-3, caracterizado porque para el valor absoluto del ángulo (Θi) de hidrófono son admisibles valores angulares para los que el seno
del ángulo sea aproximadamente igual al valor del ángulo.
5. Procedimiento según una de las reivindicaciones 1-4, caracterizado porque por medio del ángulo (Θi) de hidrófono son calculadas las coordenadas de posición de los i hidrófonos (11)
usando un sistema de coordenadas ortogonal según:
i
yi =∑∆yn
n=0
i
xi =∑∆xn
n=0
con:
∆yi = d ·sen Θi ∆x = d ⋅ cos Θ
i i y i Θi ∑Θ= n =n 1siendo d es la distancia entre los hidrófonos y ∆x0 = ∆y0 = 0 y porque la forma de la cordón es definida por las coordenadas de posición (xi, yi).
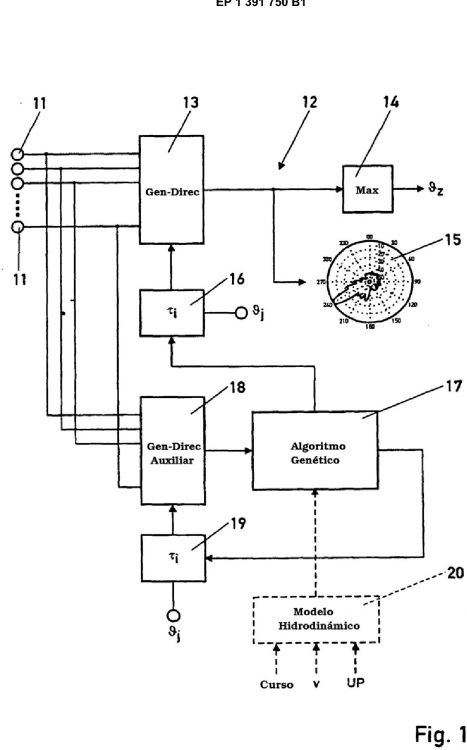
6. Procedimiento según la reivindicación 5, caracterizado porque cuando se aplica el algoritmo evolutivo a las formas geométricas de cordón potenciales en una fase de inicialización es creada una población inicial con individuos en la que formas de cordón al menos parcialmente diferentes con ángulos de hidrófono como parámetros son usadas como individuos de las formas geométricas de cordón potenciales, porque la población inicial es evaluada con una función objetivo, empleando como función objetivo el índice de directividad de las características direccionales de la antena lineal submarina que son producidas por los individuos particulares, porque a los individuos se le asigna una aptitud que corresponde a su índice de directividad, porque los individuos son seleccionados como padres en correspondencia a su aptitud, porque son producidos nuevos individuos como descendientes por medio de los padres utilizando operadores evolutivos, porque los descendientes son evaluados por la función objetivo y son introducidos dentro de la población sustituyendo a individuos existentes, creando así una nueva población, porque el proceso de creación de nuevas poblaciones se repite hasta que se satisface un criterio de interrupción, y porque cuando se satisface el criterio de interrupción el individuo que es mejor desde el punto de vista
de su aptitud es considerado como la forma de cordón óptima de la geometría de antena instantánea.
7. Procedimiento según la reivindicación 6, caracterizado porque la población inicial contiene individuos para formas de cordón curvadas parcialmente de forma diferente y parcialmente extendidas.
8. Procedimiento según la reivindicación 6 ó 7, caracterizado porque el criterio de interrupción predefinido es una cierta cantidad de poblaciones generadas.
9. Procedimiento según la reivindicación 6 -8, caracterizado porque el índice de directividad S se calcula usando:
f
max π
SP ( f ,ϑj ) dυ df
= ∫∫ 2
f 0
min
donde P2(f,ϑ ) es el espectro de potencia de las señales recibidas de la antena lineal en las direcciones de recepción (ϑ j) como función de la frecuencia f.
10. Procedimiento según una de las reivindicaciones 6–9, caracterizado porque como operadores evolutivos son usados una recombinación para producir los descendientes, y una mutación de los descendientes, con las que los ángulos (Θi) de hidrófono son modificados con una cierta probabilidad.
11. Procedimiento según una de las reivindicaciones 6–10, caracterizado porque en la población inicial son introducidos individuos adicionales con formas de cordón obtenidas por modelos hidrodinámicos.
12. Procedimiento según una de las reivindicaciones 1–11, caracterizado por su empleo para la marcación de objetivos, en el que las señales recibidas de los hidrófonos (11) son retardadas en el tiempo correcto para formar una característica direccional con una sensibilidad de recepción máxima que apunte en la dirección de marcación (ϑ j), en j direcciones de marcación, y son sumadas en fase y el tiempo de retardo correcto es calculado a partir de la distancia de los hidrófonos (11) desde una línea recta que se extiende perpendicularmente a la dirección de marcación, deducién
dose la localización de los hidrófonos a partir de la geometría de antena instantánea estimada.
Patentes similares o relacionadas:
 PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN MOMENTÁNEA DE UNA SECCIÓN ACÚSTICA DE UNA ANTENA REMOLCADA, del 13 de Mayo de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación de la posición momentánea de una sección acústica remolcada a una profundidad (ΔZ) de remolque elegida de una antena […]
PROCEDIMIENTO PARA DETERMINAR LA POSICIÓN MOMENTÁNEA DE UNA SECCIÓN ACÚSTICA DE UNA ANTENA REMOLCADA, del 13 de Mayo de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación de la posición momentánea de una sección acústica remolcada a una profundidad (ΔZ) de remolque elegida de una antena […]
 METODO Y SISTEMA PARA EL CONTROL DE POSICION DE CABLES EXPLORADORES SISMICOS MARINOS REMOLCADOS, del 10 de Noviembre de 2009, de KONGSBERG SEATEX AS: Un método para controlar la disposición y posición de cables exploradores sísmicos marinos remolcados y su dispersión; dicho método consiste en los pasos […]
METODO Y SISTEMA PARA EL CONTROL DE POSICION DE CABLES EXPLORADORES SISMICOS MARINOS REMOLCADOS, del 10 de Noviembre de 2009, de KONGSBERG SEATEX AS: Un método para controlar la disposición y posición de cables exploradores sísmicos marinos remolcados y su dispersión; dicho método consiste en los pasos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Sistema de observación in situ multipunto a largo plazo con base en el fondo marino, del 4 de Marzo de 2020, de SHANDONG UNIVERSITY: Un sistema de observación in situ multipunto a largo plazo con base en el fondo marino caracterizado por comprender un marco de plataforma , un material flotante , […]
Dispositivo para controlar la posición de un cable de instrumentado remolcado en agua, del 24 de Julio de 2019, de KONGSBERG SEATEX AS: Un dispositivo de control para controlar la posición de un cable instrumentado remolcado en el agua, como un cable marino sísmico, y/o una batería de cables […]
 Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Bloque de amarres para un deflector, del 6 de Junio de 2019, de Mørenot Offshore AS: Un bloque de amarres para un deflector , incluyendo el bloque de amarres un vástago y un brazo basculante fijados de forma pivotante entre […]
Hidrófonos y sismómetros de fondo de mar, del 20 de Marzo de 2019, de INSTITUT FRANCAIS DE RECHERCHE POUR L'EXPLOITATION DE LA MER (IFREMER): Estación de fondo de mar destinada a efectuar unas mediciones in situ que comprende una estructura portadora de flotabilidad positiva a la […]