Procedimiento para la detección de cuerpos extraños en el ensamblaje de al menos dos componentes de una pieza, así como sistema de ensamblaje.
Procedimiento para la detección de cuerpos extraños, especialmente de inclusiones,
partículas y/o impurezas,en el ensamblaje de dos componentes separados por rotura (60, 62) para dar una pieza (6) en una superficie deseparación, con las etapas de:
- Ensamblar los componentes mediante la aplicación de una fuerza de ensamblaje;
- Registrar la curva característica de fuerza/distancia de ensamblaje en el ensamblaje;
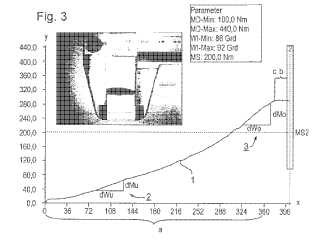
- Comparar la curva característica de fuerza/distancia de ensamblaje con una familia de curvascaracterísticas de referencia, especialmente incluyendo un intervalo de tolerancia, determinándose en lacomparación en un primer punto de medición (2) un primer gradiente de fuerza/distancia de ensamblaje(dPi/dAi) y determinándose en un segundo punto de medición (3) un segundo gradiente de fuerza/distanciade ensamblaje (dPs/dAs), luego se forma un cociente a partir de los gradientes y el cociente se comparacon un intervalo de valores de referencia determinado a partir de la familia de curvas de referencia;
- Activar una etapa para eliminar los cuerpos extraños y/o para transmitir un mensaje en caso de que seestablezca una desviación de la curva característica de fuerza/distancia de ensamblaje registrada en elensamblaje de la familia de curvas características de referencia, especialmente incluyendo el intervalo detolerancia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/053064.
Solicitante: ALFING KESSLER SONDERMASCHINEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: AUGUSTE-KESSLER-STRASSE 20 73433 AALEN ALEMANIA.
Inventor/es: WISNIEWSKI, HORST.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23P15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23P OTROS PROCEDIMIENTOS PARA EL TRABAJO DEL METAL NO PREVISTOS EN OTRO LUGAR; OPERACIONES MIXTAS; MAQUINAS HERRAMIENTAS UNIVERSALES (dispositivos para el copiado o el control B23Q). › Fabricación de objetos determinados por medio de operaciones no cubiertas en alguna sola de las otras subclases o por algún grupo de esta subclase.
- B23P19/06 B23P […] › B23P 19/00 Máquinas que efectúan simplemente el montaje o la separación de piezas metálicas u objetos entre ellos o de piezas metálicas con piezas no metálicas, implicando o no esto una cierta deformación; Herramientas o dispositivos a este efecto en la medida en que no estén previstos en otras clases (herramientas manuales en general B25). › Máquinas para colocar o retirar los tornillos o las tuercas.
PDF original: ES-2400991_T3.pdf
Fragmento de la descripción:
Procedimiento para la detección de cuerpos extraños en el ensamblaje de al menos dos componentes de una pieza, así como sistema de ensamblaje
Campo técnico
La presente invención se refiere a un procedimiento para la detección de cuerpos extraños, especialmente de inclusiones, partículas y/o impurezas, en el ensamblaje de dos componentes separados por rotura para dar una pieza en una superficie de separación. La presente solicitud se refiere además a un sistema de ensamblaje para la realización del procedimiento mencionado, así como a un dispositivo de atornillado con un controlador de atornillado, que realiza el procedimiento mencionado.
Antecedentes de la invención En el ensamblaje de dos componentes de una pieza puede ser desventajoso, por una parte, en lo referente a la resistencia de la conexión de ensamblaje y, por otra parte, en lo referente a otras etapas de montaje posteriores, que entre los dos componentes que van a ensamblarse de la pieza estén presentes cuerpos extraños, especialmente inclusiones, partículas y/o impurezas.
Esto es especialmente de importancia en la zona de ensamblaje de la tapa y del vástago de una biela rota (biela fracturada) o en el ensamblaje de la tapa y la parte inferior de una horquilla articulada en cruz rota, ya que especialmente en el procedimiento de separación por rotura pueden quedar cuerpos extraños, especialmente inclusiones o partículas, sobre las superficies de separación respectivas. En un caso posible, las partículas se desprenden mediante el primer atornillado o ensamblaje de ambos componentes de la superficie de separación, de manera que en una posterior etapa de procesamiento, por ejemplo, al volver a abrir la biela rota para el montaje final, por ejemplo, para conectarla con el cigüeñal, se caen de la biela. Sin embargo, cuando las partículas u otros cuerpos extraños se caen de las superficies de separación respectivas en el montaje final y quedan en el entorno de montaje respectivo, por ejemplo, en un motor, esto puede conducir a daños, especialmente en los rodamientos en el motor.
Por tanto, hasta la fecha se usaron diferentes procedimientos mediante los cuales pueden eliminarse los cuerpos extraños de las superficies de separación. A este respecto pueden mencionarse especialmente el cepillado, el soplado, el tratamiento con fluidos y/o la sacudida de los componentes respectivos. Luego se realiza visualmente un control final de las superficies de separación limpiadas, pero debido a las topografías muy diferentes inherentes al procedimiento no puede automatizarse.
Como otro estado de la técnica puede mencionarse el documento JP 2001-162548 A que da a conocer un procedimiento para la detección de cuerpos extraños en el ensamblaje de dos componentes para dar una pieza, que comprende las etapas
- Ensamblar los componentes
- Registrar la curva característica de fuerza/distancia de ensamblaje en el ensamblaje
- Comparar la curva característica de fuerza/distancia de ensamblaje referencia con una curva característica de
- Activar una etapa para eliminar los cuerpos extraños y/o para transmitir un mensaje en caso de que se establezca una desviación de la curva característica de fuerza/distancia de ensamblaje registrada en el ensamblaje de la curva característica de referencia.
Descripción A partir de los antecedentes técnicos anteriormente expuestos se plantea como objetivo de la presente invención proporcionar un procedimiento para la detección de cuerpos extraños, especialmente de inclusiones, partículas o impurezas, en el ensamblaje de al menos dos componentes de una pieza que hace posible una detección más fidedigna de los cuerpos extraños respectivos, así como una automaticidad.
Otro objetivo es proporcionar un sistema de ensamblaje correspondiente para la realización del procedimiento.
Un procedimiento de este tipo para la detección de cuerpos extraños, especialmente de inclusiones, partículas y/o impurezas, en el ensamblaje de al menos dos componentes se propone en la reivindicación 1. Los componentes de la pieza se ensamblan especialmente mediante la aplicación de una fuerza de ensamblaje, registrándose una curva característica de fuerza/distancia de ensamblaje en el ensamblaje. Al menos algunos intervalos de esta curva característica de fuerza/distancia de ensamblaje se comparan luego con una familia de curvas de referencia predeterminada y de manera correspondiente a la desviación respectiva se aprecia la presencia de un cuerpo extraño o se confirma la ausencia de un cuerpo extraño.
El procedimiento se basa en el conocimiento de que el desarrollo de la fuerza de ensamblaje durante la distancia de ensamblaje en el ensamblaje de ambos componentes depende de la calidad superficial respectiva, especialmente de la calidad de las superficies de separación de ambos componentes. Mediante experimentos por parte de la solicitante se descubrió que, especialmente en la zona de las piezas separadas por rotura en las superficies de separación, no sólo están presentes partículas sueltas, sino también partículas que todavía están unidas con el componente verdadero y que sólo se han curvado/doblado por el proceso de separación por rotura. Estas partículas curvadas todavía unidas al componente se vuelven a doblar de nuevo parcialmente a su posición inicial en el primer ensamblaje de ambos componentes después de la separación por rotura y a este respecto pueden romperse completamente, de manera que al volver a abrir ambos componentes, por ejemplo, para asegurar una biela rota en el cigüeñal de un motor o de un compresor, se caen de la superficie de separación correspondiente.
La solicitante ha descubierto que la fuerza de ensamblaje que va a emplearse durante la distancia de ensamblaje guarda relación con la calidad superficial de las superficies de ensamblaje respectivas o superficies de separación de los componentes.
Así, cuando un cuerpo extraño, especialmente una partícula suelta desconchada o una partícula todavía unida a uno de los componentes, está presente sobre la superficie de separación respectiva, la curva característica de fuerza/distancia de ensamblaje transcurre al principio más plana, ya que una partícula individual siempre es menos rígida que toda la superficie de ensamblaje.
Sin embargo, en el ensamblaje de dos superficies de ensamblaje completamente libres de cuerpos extraños, la curva característica de fuerza/distancia de ensamblaje presenta un desarrollo en gran medida lineal con una pendiente esencialmente constante, al menos hasta el límite de fluencia. Por el contrario, en presencia de un cuerpo extraño sobre la superficie de ensamblaje, la curva característica de fuerza/distancia de ensamblaje transcurre inicialmente más plana y luego sube posteriormente más empinada, de manera que la pendiente en el intervalo de distancia inicial del proceso de ensamblaje es más pequeño que al final del proceso de ensamblaje.
Mediante el procedimiento propuesto ahora puede determinarse, debido a una comparación de la curva característica de fuerza/distancia de ensamblaje en el ensamblaje de ambas piezas con una familia de curvas de referencia, si las superficies de ensamblaje respectivas, especialmente las superficies de separación de ambas piezas ensambladas, estaban limpias o si aquí estaban presentes cuerpos extraños, especialmente inclusiones, partícula y/o impurezas sobre una o ambas de las superficies de ensamblaje, y de manera correspondiente la curva característica de fuerza/distancia de ensamblaje se desvía en el ensamblaje de la familia de curvas de referencia fijada. Si se establece una desviación de este tipo, entonces la pieza ensamblada puede someterse a un tratamiento separado mediante el cual se eliminen el cuerpo extraño.
Para comparar la curva característica de fuerza/distancia de ensamblaje determinada en el ensamblaje con la familia de curvas de referencia se determina al menos un primer gradiente de fuerza de ensamblaje y distancia en al menos un primer punto de medición, y al menos un segundo gradiente de fuerza de ensamblaje y distancia en un segundo punto de medición, que se diferencia del primer punto de medición.
Además, luego se forma el cociente a partir de los gradientes y el cociente se compara con un intervalo de valores de gradientes determinados resultantes de la familia de curvas de referencia, especialmente incluyendo un intervalo de tolerancia predeterminado. De esta manera puede simplificarse la comparación entre la curva característica de fuerza/distancia de ensamblaje medida en el actual proceso de ensamblaje y la familia de curvas de referencia, ya que aquí sólo debe compararse un valor unidimensional.
El establecimiento del primer punto de medición,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la detección de cuerpos extraños, especialmente de inclusiones, partículas y/o impurezas, en el ensamblaje de dos componentes separados por rotura (60, 62) para dar una pieza (6) en una superficie de separación, con las etapas de:
-Ensamblar los componentes mediante la aplicación de una fuerza de ensamblaje;
-Registrar la curva característica de fuerza/distancia de ensamblaje en el ensamblaje;
-Comparar la curva característica de fuerza/distancia de ensamblaje con una familia de curvas características de referencia, especialmente incluyendo un intervalo de tolerancia, determinándose en la comparación en un primer punto de medición (2) un primer gradiente de fuerza/distancia de ensamblaje (dPi/dAi) y determinándose en un segundo punto de medición (3) un segundo gradiente de fuerza/distancia de ensamblaje (dPs/dAs) , luego se forma un cociente a partir de los gradientes y el cociente se compara con un intervalo de valores de referencia determinado a partir de la familia de curvas de referencia;
-Activar una etapa para eliminar los cuerpos extraños y/o para transmitir un mensaje en caso de que se establezca una desviación de la curva característica de fuerza/distancia de ensamblaje registrada en el ensamblaje de la familia de curvas características de referencia, especialmente incluyendo el intervalo de tolerancia.
2. Procedimiento según una de las reivindicaciones precedentes, en el que la fuerza de ensamblaje entre dos componentes se aplica mediante atornillado y como curva característica de fuerza/distancia de ensamblaje se registra una curva característica del par de giro/ángulo de giro.
3. Procedimiento según la reivindicación 2, en el que la fuerza de ensamblaje se aplica a los tornillos mediante un dispositivo de atornillado y el dispositivo de atornillado transmite la curva característica del par de giro/ángulo de giro a un dispositivo de evaluación que compara la curva característica del par de giro/ángulo de giro con la familia de curvas característica de referencia.
4. Procedimiento según la reivindicación 1, en el que la fuerza de ensamblaje se aplica directamente sobre los componentes que van a ensamblarse mediante un dispositivo de compresión, especialmente una prensa de ensamblaje.
5. Procedimiento según una de las reivindicaciones precedentes, en el que el intervalo de valores predeterminado o la familia de curvas de referencia se determina mediante mediciones empíricas en el mismo tipo de pieza, estando la superficie de ensamblaje limpia de cuerpos extraños y comprendiendo la familia de curvas de referencia determinada o el valor de referencia determinado el intervalo de valores empíricamente determinado, así como un intervalo de tolerancia que lo supera.
6. Procedimiento según una de las reivindicaciones precedentes, en el que la etapa de desatornillado de la etapa para eliminar el cuerpo extraño comprende las siguientes etapas adicionales:
-Desatornillar la conexión de ensamblaje,
-Eliminar el cuerpo extraño, y
-Ensamblar de nuevo usando el procedimiento según una de las reivindicaciones precedentes.
7. Procedimiento según la reivindicación 6, en el que el cuerpo extraño se elimina mediante sacudida de los componentes, choque de los componentes entre sí, soplado, cepillado, tratamiento con fluidos o una eliminación manual.
8. Procedimiento según una de las reivindicaciones precedentes, en el que el gradiente se determina al principio y al final de la curva característica de fuerza/distancia de ensamblaje, especialmente en el 20 % inferior de la fuerza de ensamblaje aplicada máxima, así como en el 80 % superior de la fuerza de ensamblaje aplicada máxima.
9. Procedimiento según una de las reivindicaciones precedentes, en el que la pieza a ensamblar es una biela rota o una horquilla articulada en cruz rota.
10. Sistema de ensamblaje para la realización del procedimiento según una de las reivindicaciones precedentes, en el que la pieza a ensamblar es una biela rota o una horquilla articulada en cruz rota, que comprende:
-un dispositivo de ensamblaje que transmite una curva característica de fuerza/distancia de ensamblaje a un dispositivo de evaluación;
-dispositivo de evaluación para comparar la curva característica de fuerza/distancia de ensamblaje que transmite el dispositivo de ensamblaje con una familia de curvas de referencia, determinándose en la comparación en un primer punto de medición (2) un primer gradiente de fuerza/distancia de ensamblaje
(dPi/dAi) y determinándose en un segundo punto de medición (3) un segundo gradiente de fuerza/distancia de ensamblaje (dPs/dAs) , luego se forma un cociente a partir de los gradientes y el cociente se compara con un intervalo de valores de referencia determinado a partir de la familia de curvas de referencia;
-dispositivo de transmisión para transmitir un mensaje o para transmitir una orden para eliminar el cuerpo extraño.
11. Sistema de ensamblaje según la reivindicación 10, en el que como dispositivo de ensamblaje está previsto un dispositivo de atornillado.
12. Dispositivo de atornillado con un controlador de atornillado que realiza el procedimiento según una de las reivindicaciones 2-9, a excepción de la reivindicación 4.
Patentes similares o relacionadas:
Método de fijación de un elemento hueco a un componente que comprende un material compuesto, del 1 de Abril de 2020, de PROFIL VERBINDUNGSTECHNIK GMBH & CO. KG: Procedimiento para fijar un elemento hueco , tal como un remache hueco o un elemento de tuerca para su fijación a un componente que consiste en un material […]
Procedimiento para punzonar y fijar un elemento de fijación, del 1 de Abril de 2020, de PROFIL VERBINDUNGSTECHNIK GMBH & CO. KG: Procedimiento para punzonar y fijar un elemento de fijación en una pieza de trabajo plana, en particular en una pieza de chapa, presionándose durante el punzonado […]
Método para instalar un sujetador de autorremache, del 12 de Febrero de 2020, de R B & W Manufacturing LLC: Un método para instalar un sujetador de autorremache en un sustrato de acero, incluyendo: recibir el sustrato en una prensa de conformado, siendo […]
Apriete automático de pernos, del 11 de Diciembre de 2019, de GE Renewable Technologies Wind B.V: Un procedimiento para apretar un perno en una conexión empernada entre un anillo externo de un rodamiento de pitch y un buje o […]
Robot con medios de posicionamiento para mover una herramienta a lo largo de una conexión de brida, del 3 de Diciembre de 2019, de ADMEDE AB: Robot para apretar una serie de tuercas prerroscadas en pernos dispuestos en una conexión de brida curvada particular o lineal […]
Pinzas de mecanizado, del 20 de Noviembre de 2019, de SCHMIDT, HEIKO: Pinzas de mecanizado para el mecanizado y/o procesamiento de piezas de trabajo con elevadas fuerzas de mecanizado (F) que comprende un cuerpo de las pinzas con un primer […]
Elemento hueco para su fijación a un componente que comprende un material compuesto, del 20 de Noviembre de 2019, de PROFIL VERBINDUNGSTECHNIK GMBH & CO. KG: Un elemento hueco , tal como un remache hueco o un elemento de tuerca para su fijación a un componente que consiste en un material compuesto […]
Dispositivo tensor para el estiramiento de un perno roscado, del 13 de Noviembre de 2019, de HOHMANN, JORG: Dispositivo tensor para el estiramiento de un perno roscado por tracción en su sección extrema roscada (A) con un tubo de apoyo que rodea la sección extrema roscada (A), […]