PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE.
Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia inicial de reloj con una desviación de reloj desconocido,
comprendiendo dicho procedimiento: en dicha primera entidad, medir un conjunto de tiempo de llegada de señales de distancia desde la pluralidad de satélites como una función de dicha referencia inicial de reloj, para proporcionar un conjunto inicial de valores medidos de distancia; caracterizado por: determinar cada uno, entre una pluralidad de valores de estadísticas de errores, como una función de una pluralidad de desplazamientos temporales, que incluyen, para cada uno de los mismos: (a) alterar dicho conjunto de mediciones temporales con un desplazamiento temporal distinto, para proporcionar un conjunto de mediciones temporales alteradas, proporcionando por ello un conjunto alterado de valores de distancia; y (b) determinar una estadística de errores en respuesta a dicho conjunto alterado de valores de distancia; ejecutar repetidamente las etapas (a) y (b) para proporcionar un conjunto de valores de estadísticas de error; en respuesta a dicho conjunto de valores de estadística de errores, seleccionar un desplazamiento temporal que reduzca la estadística de errores; y resolver dicho tiempo de referencia en base a dicho desplazamiento temporal y dicha referencia inicial de reloj
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08016526.
Solicitante: SNAPTRACK INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: C/O QUALCOMM INCORPORATED 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SHEYNBLAT, LEONID, KRASNER, NORMAN F..
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Abril de 1999.
Clasificación Internacional de Patentes:
- G01S1/00S1A
- G01S1/00S1A1
- G01S19/09 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando recursos de procesamiento normalmente llevado a cabo por el receptor.
- G01S19/23 G01S 19/00 […] › Ensayo, monitorización, corrección o calibrado de un elemento receptor.
- G01S19/25C
- G01S19/42 G01S 19/00 […] › Determinación de la posición.
- G01S5/00R
- G01S5/00R1B
- G01S5/00R2B
- G01S5/14B
- G04G7/02
Clasificación PCT:
- G01S19/42 G01S 19/00 […] › Determinación de la posición.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
PDF original: ES-2358302_T3.pdf

Fragmento de la descripción:
Referencias cruzadas con solicitudes relacionadas
La solicitud es una continuación en parte de la Solicitud de Patente Estadounidense 08 / 794.649, titulada “Method and Apparatus for Satellite Positioning System Based Time Measurement” [“Procedimiento y aparato para la medición del tiempo en base a un sistema de localización por satélite”], registrada el 3 de febrero de 1997, y adjudicada al cesionario de la presente invención.
Antecedentes de la invención
Campo de la invención:
La presente invención se refiere a sistemas por posicionamiento de satélites (SPS) y, en particular, a determinar el tiempo asociado a la transmisión y / o recepción de la señal de los SPS.
Información de antecedentes:
Los receptores de SPS, tales como los receptores del GPS (Sistema de Posicionamiento Global), normalmente determinan su posición calculando los tiempos relativos de llegada de señales transmitidas simultáneamente desde una multiplicidad de satélites, tales como los satélites de GPS (o NAVSTAR). En sistemas típicos de posicionamiento por satélites, tales como los GPS, la multiplicidad de satélites se sincroniza según un reloj de sistema sumamente preciso, que puede proporcionar exactitud de reloj atómico. Generalmente, cada satélite transmite datos de navegación (por ejemplo, la localización del satélite) que también incluyen un sello temporal para indicar cuándo fueron transmitidos los datos, según el tiempo indicada por el reloj de sistema (mencionada en lo que sigue como el tiempo del sistema) que, en el caso de los GPS, se denominará el tiempo del sistema (GPS).
Sin embargo, los receptores de SPS, típicamente, no tienen un reloj tan preciso. Así, un receptor de SPS, habitualmente, determina la información de temporización leyendo y cronometrando información contenida en el mensaje del satélite. Muchos receptores determinan la posición y el tiempo usando mediciones de cuatro (o más) satélites. La distancia a cada uno de cuatro satélites (i = 1, 2, 3, 4) puede expresarse como:
**(Ver fórmula)**
en la que x, y y z son las coordenadas / posición del receptor (desconocidas);
xi, yi y zi son las coordenadas / posición del i-ésimo satélite (conocidas); y
cb representa la desviación del reloj, que es un resultado del error de tiempo entre el reloj del receptor y el tiempo de referencia (desconocido).
Así, existen, habitualmente, un total de cuatro incógnitas en la ecuación (1) anterior.
A menudo, PRi se denomina una seudodistancia, dado que representa la distancia efectiva al i-ésimo satélite, más o menos un desplazamiento que puede resultar debido al error en el reloj del receptor, como se indica con el término cb en la ecuación (1). La ecuación anterior, usando mediciones de cuatro satélites, puede ser linealizada y expresada en forma matricial de la siguiente manera:
**(Ver fórmula)**
40
45
en la que
ΔPRi es el residuo de la seudodistancia para el i-ésimo satélite (i = 1, 2, 3, 4) y representa una diferencia entre la seudodistancia medida y una distancia estimada inicial para el i-ésimo satélite (conocida);
uxi, uyi, y uzi son los cosenos de la dirección del vector de la línea de visión (LDV) desde el receptor al iésimo satélite, según se proyecta a lo largo de los ejes de coordenadas x, y y z (conocidos);
Δx, Δy, Δz y Δcb son las correcciones de las estimaciones iniciales de las coordenadas / posición y el reloj del receptor, que pueden estar desajustadas con respecto a un reloj de referencia (desconocidas).
En lo que sigue, el vector residual de la seudodistancia se denomina también Z, la matriz H de nx4 elementos se denomina también una matriz de observación, y x representa el vector de corrección de tiempo y posición del receptor de SPS, que contiene las incógnitas de interés. Así, si existe una inversa de la matriz de observación H, puede determinarse una única solución para la incógnita x en el conjunto de ecuaciones lineales representadas por la ecuación matricial anterior (2), tal que:
x = H-1 Z
o
**(Ver fórmula)**
en la que, H-1 es la inversa de la matriz de observación;
(HT H)-1 es la seudoinversa de la matriz de observación; y
**(Ver fórmula)**
es la estimación por cuadrados mínimos del vector de parámetros desconocidos, x.Para determinar las seudodistancias (PRi), un receptor convencional de SPS, habitualmente, usa una estimación inicial de su posición y del sesgo de reloj, que se conoce con precisión de un milisegundo. Sin embargo, dado que las señales de los satélites viajan a, o aproximadamente a, la velocidad de luz, incluso un milisegundo de ambigüedad en el tiempo puede dar como resultado un error de hasta 300 kilómetros en la medición de la seudodistancia. Resolviendo la ecuación matricial (2) anterior, el receptor convencional del GPS puede calcular una corrección de su estimación inicial del sesgo del reloj, en donde la estimación inicial del sesgo del reloj se obtiene leyendo el mensaje de navegación que proporciona la información de “alineación temporal”.
Lamentablemente, en muchas situaciones, determinar el tiempo del sistema leyendo el mensaje de navegación de uno o más satélites puede ser difícil, debido a la degradación de la calidad de la señal. Por ejemplo, allí donde hay obstrucción de las señales del satélite, el nivel recibido de la señal o la relación señal / ruido (SNR) recibida de los satélites del GPS puede ser demasiado bajo para demodular y leer las señales de datos del satélite sin error. Tales situaciones pueden presentarse en el rastreo personal y otras solicitudes sumamente móviles. Bajo tales condiciones de señal, todavía es posible para un receptor adquirir y rastrear las señales de los GPS. Sin embargo, la localización y la medición de tiempo no ambiguas sin datos de temporización pueden llevarse a cabo de mejor manera utilizando procedimientos alternativos.
La invención presente proporciona un procedimiento y un aparato para determinar el tiempo en un SPS, tal como el tiempo de la transmisión de un satélite y / o el tiempo de medición por un receptor SPS, con respecto a una tiempo de referencia (por ejemplo, el tiempo del sistema u otra tiempo de referencia relativamente exacta) sin que sea necesario determinar el tiempo de referencia procesando información de temporización proporcionada dentro del mensaje de datos de navegación del satélite.
El documento US 4 578.678 describe un receptor del GPS con un cierto número de canales, uno para cada uno entre una pluralidad de satélites. Un conjunto de señales moduladas por división del tiempo del código de seudodistancia es recibido desde algunos de, o todos, los satélites, y convertido a banda base, y luego a una forma digital, para su procesamiento por separado en los distintos canales, cada uno de los cuales incluye un mezclador complejo para el ajuste de la señal de banda base en una estimación llana de la frecuencia para el próximo intervalo de medición. Un correlacionador cruzado de rezago-N recibe una réplica del código de seudodistancia, ajustado para una estimación allanada del (retardo) de seudodistancia. Un procesador de la transformada rápida de Fourier calcula la energía de señal como una función de la frecuencia Doppler para cada rezago de correlación, y un estimador de distancia y frecuencia calcula estimaciones de seudodistancia y frecuencia. Estas estimaciones bastas desde todos los canales se usan para estimar la posición, velocidad, desplazamiento de reloj y desplazamiento de velocidad de reloj del receptor en una unidad convencional de navegación y control y, en base a la solución total, esa unidad calcula estimaciones allanadas para el próximo intervalo de medición.
Resumen de la invención
Según un primer aspecto, la presente invención proporciona un procedimiento para determinar una tiempo de referencia, según lo definido en la reivindicación adjunta 1. Además, según otro aspecto, la presente invención proporciona un aparato para determinar una tiempo de referencia, según lo definido en la reivindicación adjunta 8.
Descripción de los dibujos
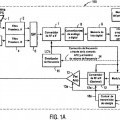
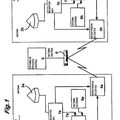
La Figura 1A muestra un ejemplo de un receptor móvil GPS combinado con un sistema de comunicación, que puede ser utilizado... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia inicial de reloj con una desviación de reloj desconocido, comprendiendo dicho procedimiento:
en dicha primera entidad, medir un conjunto de tiempo de llegada de señales de distancia desde la pluralidad de satélites como una función de dicha referencia inicial de reloj, para proporcionar un conjunto inicial de valores medidos de distancia; caracterizado por:
determinar cada uno, entre una pluralidad de valores de estadísticas de errores, como una función de una pluralidad de desplazamientos temporales, que incluyen, para cada uno de los mismos:
(a) alterar dicho conjunto de mediciones temporales con un desplazamiento temporal distinto, para proporcionar un conjunto de mediciones temporales alteradas, proporcionando por ello un conjunto alterado de valores de distancia; y
(b) determinar una estadística de errores en respuesta a dicho conjunto alterado de valores de distancia;
ejecutar repetidamente las etapas (a) y (b) para proporcionar un conjunto de valores de estadísticas de error;
en respuesta a dicho conjunto de valores de estadística de errores, seleccionar un desplazamiento temporal que reduzca la estadística de errores; y
resolver dicho tiempo de referencia en base a dicho desplazamiento temporal y dicha referencia inicial de reloj.
2. El procedimiento de la reivindicación 1, en el cual dicha primera entidad es un receptor del sistema de posicionamiento por satélite (SPS).
3. El procedimiento de la reivindicación 1, que incluye adicionalmente la etapa de determinar una ubicación de dicha entidad en base a dicho desplazamiento.
4. El procedimiento de la reivindicación 1, en el cual cada una entre dicho conjunto de tiempo medidas de llegada de señales de distancia está asociada al correspondiente entre el conjunto de satélites y está desplazada con respecto a un tiempo de referencia.
5. El procedimiento de la reivindicación 1, en el cual, en respuesta a dicho conjunto de valores de estadística de errores, la selección de un desplazamiento temporal que reduzca la estadística de errores comprende:
determinar un ajuste polinómico para el conjunto de valores de estadística de errores; y determinar un desplazamiento que minimice el valor de la estadística de errores.
6. El procedimiento de la reivindicación 1, en el cual el ajuste polinómico es lineal.
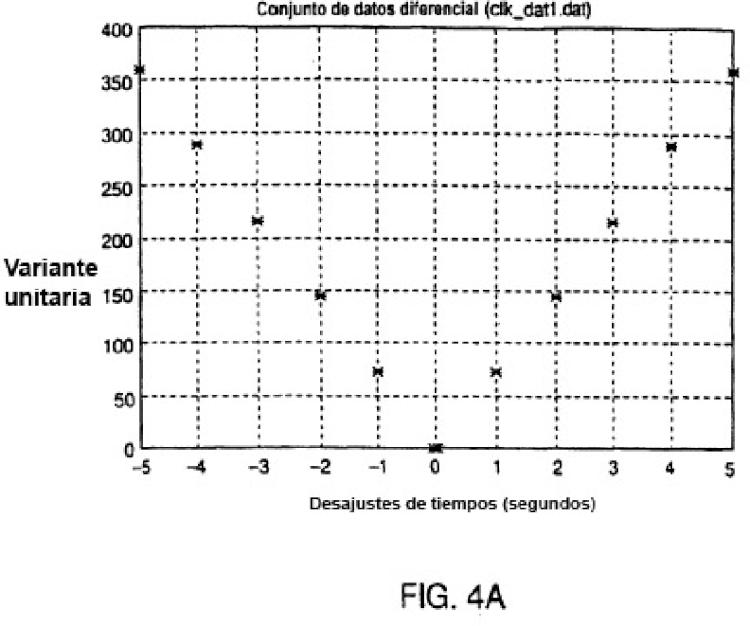
7. El procedimiento de la reivindicación 1, en el cual la determinación del valor de la estadística de errores incluye determinar una distribución de varianza unitaria de valores residuales de seudodistancia.
8. Un aparato para despejar una tiempo de referencia en una primera entidad que recibe señales de distancia desde una pluralidad de satélites y que tiene una referencia inicial de reloj con una desviación de reloj desconocido, comprendiendo dicho aparato:
un medio para medir un conjunto de tiempo de llegada de señales de distancia desde la pluralidad de satélites como una función de dicha referencia inicial de reloj, a fin de proporcionar un conjunto inicial de valores medidos de distancia;
caracterizado por: un medio para determinar cada uno entre una pluralidad de valores de estadística de errores, como una función de una pluralidad de desplazamientos temporales, que incluye:
(a) un medio para alterar dicho conjunto de mediciones temporales en un desplazamiento temporal distinto, a fin de proporcionar un conjunto de mediciones temporales alteradas, proporcionando por ello un conjunto alterado de valores de distancia; y
(b) un medio para determinar una estadística de errores en respuesta a dicho conjunto alterado de valores de distancia;
un medio para alterar repetidamente dicho tiempo de llegada en un desplazamiento temporal distinto y determinar una estadística de errores en respuesta a dicho conjunto alterado, a fin de proporcionar un conjunto de valores de estadística de errores;
un medio, sensible a dicho conjunto de valores de estadística de errores, para seleccionar un desplazamiento temporal que reduzca la estadística de errores; y
un medio para despejar dicho tiempo de referencia en base a dicho desplazamiento temporal y dicha referencia inicial de reloj.
9. El aparato de la reivindicación 8, que comprende adicionalmente un medio para determinar una ubicación de dicha entidad en base a dicho desplazamiento.
10. El aparato de la reivindicación 8, en el cual dicho medio para seleccionar un desplazamiento temporal que reduzca la estadística de errores comprende:
un medio para determinar un ajuste polinómico para el conjunto de valores de estadísticas de errores; y 10 un medio para determinar un desplazamiento que minimice el valor de estadística de errores.
Patentes similares o relacionadas:
Sistema y método para determinar la diferencia de tiempo entre dos plataformas, del 31 de Agosto de 2016, de SELEX ES LTD: Método para determinar diferencias de tiempo entre dos o más plataformas , incluyendo el método las etapas de: a) transmitir una señal de inicialización […]
 Establecimiento de llamada de telecomunicación de medios mixtos, del 18 de Marzo de 2016, de 3G Licensing S.A: Estación móvil apta para videotelefonía en respuesta a una interrupción de una llamada en curso de telecomunicaciones de medios mixtos, comprendiendo […]
Establecimiento de llamada de telecomunicación de medios mixtos, del 18 de Marzo de 2016, de 3G Licensing S.A: Estación móvil apta para videotelefonía en respuesta a una interrupción de una llamada en curso de telecomunicaciones de medios mixtos, comprendiendo […]
METODO Y APARATO PARA LA MEDIDA DEL TIEMPO HORARIO BASADO EN UN SISTEMA DE POSICIONAMIENTO POR SATELITE., del 1 de Septiembre de 2003, de SNAPTRACK INC.: PROCEDIMIETO Y APARATO PARA MEDIR EL TIEMPO EN RELACION CON LOS MENSAJES DE DATOS POR SATELITES QUE SE UTILIZAN CON EL SISTEMA DE POSICIONAMIENTO […]
PROCEDIMIENTO DE DETERMINACION EN TIEMPO REAL DE UN RETRASO DE TIEMPO ENTRE ESTACIONES EN UN SISTEMA DE RADIO-LOCALIZACION-NAVEGACION., del 1 de Marzo de 2002, de CENTRE NATIONAL D'ETUDES SPATIALES: SEGUN LA INVENCION, CADA ESTACION EMITE UN CODIGO PSEUDOALEATORIO Y HACE DEPENDER EL MOMENTO DE REEMISION DE SU CODIGO POR EL SATELITE DE UN VALOR DE REFERENCIA. […]
RADIORRELOJ AUTONOMO, del 16 de Diciembre de 1997, de JUNGHANS UHREN GMBH: LA INVENCION SE REFIERE A UN RADIORRELOJ AUTONOMO, CUYO RECEPTOR PARA INFORMACIONES DE TIEMPO ABSOLUTAS CODIFICADAS DE FORMA BINARIA MODULADAS EN LONGITUD DE IMPULSOS, […]
PROCESO PARA EL SERVICIO DE UN RELOJ EMISOR Y RELOJ EMISOR PARA EMPLEO EN UN CAMPO CIRCUNDANTE AFECTADO POR UN CAMPO DE PERTURBACIONES, del 1 de Febrero de 1997, de TEMIC TELEFUNKEN MICROELECTRONIC GMBH: LA INVENCION SE REFIERE A UN PROCESO PARA HACER FUNCIONAR UN RELOJ EMISOR (FU) COMPUESTO POR UN RELOJ CONTROLADO POR CUARZO (QU), QUE SE SINCRONIZA POR UN RECEPTOR […]
RADIO-RELOJ AUTONOMO., del 1 de Octubre de 1995, de JUNGHANS UHREN GMBH: UN RADIO-RELOJ AUTONOMO DEBE EQUIPARSE CON LAS CORRESPONDIENTES EXIGENCIAS DE TECNICAS DE EMPLEO, ESPECIALMENTE EN RELOJES DEL TIPO DE DESPERTADOR DE VIAJE O UN RELOJ PULSERA. […]
 MEJORAS PARA SISTEMAS ELECTRONICOS DE SINCRONIZACION EN EL TIEMPO, del 16 de Abril de 2009, de ROKE MANOR RESEARCH LIMITED: Un sistema de medida del desplazamiento en el tiempo, para la sincronización en el tiempo de eventos en emplazamientos separados entre sí, que comprende en cada emplazamiento: […]
MEJORAS PARA SISTEMAS ELECTRONICOS DE SINCRONIZACION EN EL TIEMPO, del 16 de Abril de 2009, de ROKE MANOR RESEARCH LIMITED: Un sistema de medida del desplazamiento en el tiempo, para la sincronización en el tiempo de eventos en emplazamientos separados entre sí, que comprende en cada emplazamiento: […]