POSICIONAMIENTO USANDO UNA ESTACIÓN DE REFERENCIA.
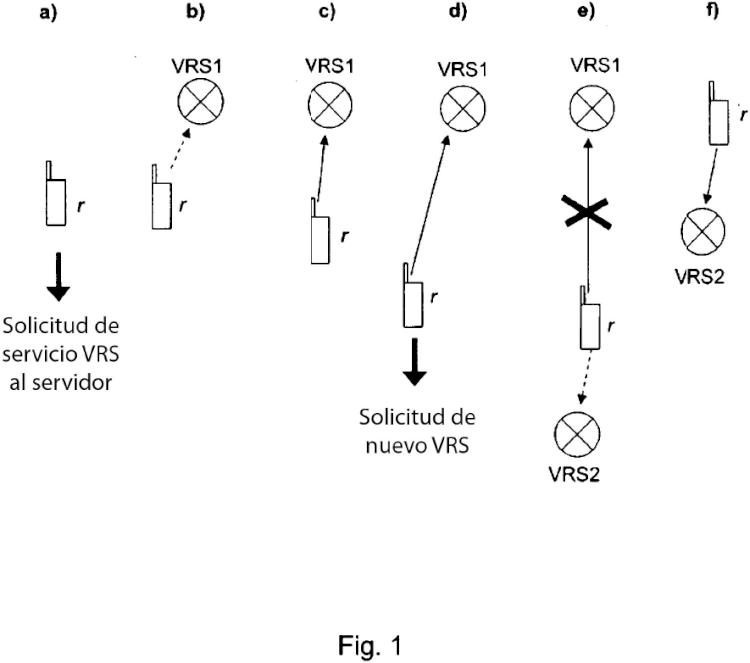
Un procedimiento que comprende: usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una primera estación (VRS1) de referencia y datos proporcionados por un receptor (320) de señales satelitales para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia y para rastrear la línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia;
usar mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para la primera estación (VRS1) de referencia y mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para una segunda estación (VRS2) de referencia, que han sido recibidas en paralelo durante un tiempo limitado, y datos provistos por el receptor (320) de señales satelitales para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia; y usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para la segunda estación (VRS2) de referencia, datos proporcionados por el receptor (320) de señales satelitales y las ambigüedades enteras resueltas para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia para rastrear la línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2007/051901.
Solicitante: NOKIA CORPORATION.
Nacionalidad solicitante: Finlandia.
Dirección: KEILALAHDENTIE 4 02150 ESPOO FINLANDIA.
Inventor/es: SYRJARINNE,JARI, WIROLA,LAURI.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Mayo de 2007.
Clasificación Internacional de Patentes:
- G01S19/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando datos sobre la fase de la portadora.
Clasificación PCT:
- G01S19/04 G01S 19/00 […] › proporcionando datos sobre la fase de la portadora.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359841_T3.pdf




Fragmento de la descripción:
Campo de la invención
La invención se refiere al campo del posicionamiento de un dispositivo que comprende un receptor de señales satelitales y, más específicamente, a un posicionamiento basado en mediciones sobre señales satelitales que se proporcionan para una estación de referencia.
Antecedentes de la invención
Un posicionamiento absoluto de un dispositivo dispone de soporte por parte de diversos Sistemas Globales de Satélites de Navegación (GNSS). Estos incluyen, por ejemplo, el Sistema Estadounidense de Posicionamiento Global (GPS), el Sistema Satelital Ruso de Navegación Global (GLONASS), el futuro sistema europeo Galileo, los Sistemas de Aumento de Base Espacial (SBAS), el Sistema Japonés Satelital Cuasi-cenital (QZSS) de aumento del GPS, los Sistemas Locales de Aumento de Área (LAAS) y los sistemas híbridos. Los satélites de estos sistemas también se denominan vehículos espaciales (SV).
La constelación en el GPS, por ejemplo, consiste en más de 20 satélites que orbitan la Tierra. Cada uno de los satélites transmite dos señales portadoras L1 y L2. Una de estas señales portadoras L1 se emplea para llevar un mensaje de navegación y señales de código de un servicio de posicionamiento estándar (SPS). La fase portadora L1 está modulada por cada satélite con un código distinto de C/A (Adquisición Gruesa). Así, se obtienen distintos canales para la transmisión por los distintos satélites. El código de C/A es un código de ruido seudoaleatorio (PRN), que está ensanchando el espectro sobre un ancho de banda de 1 MHz. Se repite cada 1023 bits, siendo la época del código de 1 ms. La frecuencia portadora de la señal L1 se modula adicionalmente con información de navegación a una tasa de transmisión de bits de 50 bits / seg. La información de navegación comprende, inter alia, efemérides y parámetros de almanaque. Los parámetros de efemérides describen secciones breves de la órbita del respectivo satélite. En base a estos parámetros de efemérides, un algoritmo puede estimar la posición del satélite para cualquier momento mientras el satélite está en la respectiva sección descrita. Los parámetros de almanaque son parámetros de órbita similares, pero más bastos, que son válidos para un tiempo más largo que los parámetros de efemérides. La información de navegación comprende adicionalmente, por ejemplo, modelos de reloj que relacionan el tiempo satelital con el tiempo del sistema del GPS y el tiempo del sistema con el Tiempo Universal Coordinado (UTC).
Un receptor del GPS, cuya posición ha de determinarse, recibe las señales transmitidas por los satélites actualmente disponibles, y detecta y rastrea los canales usados por distintos satélites, en base a los distintos códigos comprendidos de C / A. Luego, el receptor determina el tiempo de transmisión del código transmitido por cada satélite, usualmente en base a los datos en los mensajes de navegación descodificados y a los totales de épocas y chips de los códigos de C /
A. El tiempo de transmisión y el tiempo medido de llegada de una señal en el receptor permiten determinar la seudodistancia entre el satélite y el receptor. El término seudodistancia indica la distancia geométrica entre el satélite y el receptor, distancia que está sesgada por desplazamientos desconocidos del satélite y del receptor con respecto a el tiempo del sistema del GPS.
En un posible esquema de solución, el desplazamiento entre los relojes del satélite y del sistema se supone conocido y el problema se reduce a resolver un conjunto no lineal de ecuaciones de cuatro incógnitas (3 coordenadas de posición del receptor y el desplazamiento entre los relojes del receptor y del sistema del GPS). Por lo tanto, se requieren al menos 4 mediciones a fin de poder resolver el conjunto de ecuaciones. El resultado del proceso es la posición del receptor.
De manera similar, es la idea general del posicionamiento del GNSS recibir señales satelitales en un receptor que ha de localizarse, medir la seudodistancia entre el receptor y el respectivo satélite y, además, la posición actual del receptor, haciendo uso, además, de posiciones estimadas de los satélites. Usualmente, se evalúa una señal de PRN, que ha sido usada para modular una señal portadora, para el posicionamiento, según lo anteriormente descrito para el GPS.
En un enfoque posterior, las fases portadoras y / o las fases de código medidas en dos receptores del GNSS se evalúan para determinar la distancia y la altitud entre los dos receptores muy exactamente, habitualmente con una precisión al nivel del cm o incluso del mm. La combinación de la distancia y la altitud entre los dos receptores y, por ello, el vector entre estos receptores, también se denomina línea base. Las mediciones de fase portadora que se realizan en los receptores del GNSS pueden intercambiarse en tiempo real, en tiempo casi real o bien almacenarse para un intercambio posterior, conocido como posprocesamiento. Habitualmente, uno de los receptores del GNSS se dispone en una localidad conocida y se llama estación de referencia, mientras que el otro receptor ha de localizarse con respecto a la estación de referencia y se llama receptor de usuario o vagabundo. La posición relativa determinada puede además convertirse en una posición absoluta, si la ubicación de la estación de referencia se conoce con exactitud. Sin embargo, los cálculos de posicionamiento relativo requieren efectivamente que las posiciones de ambos receptores se conozcan al menos aproximadamente. Estas posiciones pueden obtenerse a partir de determinadas seudodistancias. Alternativamente, también sería suficiente conocer sólo una ubicación de referencia aproximadamente, dado que la ubicación del vagabundo puede obtenerse de la misma sumando la estimación de la línea base a la ubicación de referencia.
Una señal satelital se distorsiona en su camino desde un satélite a un receptor, debido, por ejemplo, a la propagación multitrayecto y debido a influencias por parte de ionosfera y la troposfera. Además, la señal satelital tiene un sesgo debido al sesgo del reloj satelital. Todos los errores que son comunes a una señal en ambos receptores pueden suponerse correlacionados entre los receptores y satélites y, por ello, desvanecidos en la doble diferenciación.
El posicionamiento relativo puede por ello basarse más específicamente en mediciones de señales en dos receptores del GNSS, que se usan para formar valores observables de doble diferencia. Tales mediciones de señales pueden incluir, por ejemplo, mediciones de fase portadora y mediciones de código de PRN, etc. Un valor observable de doble diferencia referido a la fase portadora es la diferencia en la fase portadora de una señal satelital específica en ambos receptores, comparada con la diferencia en la fase portadora de otra señal satelital en ambos receptores. Un valor observable de doble diferencia referido al código de PRN puede obtenerse de forma correspondiente. Los valores observables de doble diferencia pueden luego emplearse para determinar la posición de cada uno de los receptores con respecto al otro con alta precisión.
Con el posicionamiento convencional del GNSS, dos receptores del GNSS son capaces de determinar su ubicación y, por lo tanto, la línea base entre ellos, con una precisión de entre 5 y 20 metros. El enfoque basado en fase portadora o de código, por el contrario, permite la determinación de la línea base con una precisión mucho mayor, de entre 0,1 y 10 cm. Es digno de mención que esta precisión puede lograrse con receptores comerciales estándar del GNSS.
Al usar el enfoque basado en fase portadora o de código, sin embargo, ha de considerarse que una fase portadora o de código medida en dos receptores se basa en un número distinto de ciclos enteros de la fase portadora o de código. Este efecto se denomina ambigüedad entera de doble diferencia, que ha de resolverse. Este proceso también se llama resolución o inicialización de ambigüedad entera.
La ambigüedad entera de doble diferencia puede resolverse recogiendo datos de fase portadora y / o de código de un número suficiente de satélites en suficientes instantes de medición.
En lugar de las ambigüedades enteras de doble diferencia, asimismo podrían considerarse y resolverse otras varias ambigüedades.
Una vez que la línea base ha sido determinada y la ambigüedad entera ha sido resuelta, puede validarse la solución de la ambigüedad entera a fin de determinar si es de fiar. La validación de ambigüedad entera se hace habitualmente usando herramientas estadísticas.
Las ambigüedades enteras resueltas y validadas pueden usarse luego para rastrear la línea base entre los receptores con... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento que comprende:
usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una primera estación (VRS1) de referencia y datos proporcionados por un receptor (320) de señales satelitales para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia y para rastrear la línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia;
usar mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para la primera estación (VRS1) de referencia y mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para una segunda estación (VRS2) de referencia, que han sido recibidas en paralelo durante un tiempo limitado, y datos provistos por el receptor (320) de señales satelitales para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia; y
usar mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para la segunda estación (VRS2) de referencia, datos proporcionados por el receptor (320) de señales satelitales y las ambigüedades enteras resueltas para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia para rastrear la línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia.
2. El procedimiento según la reivindicación 1, en el cual la primera estación (VRS1) de referencia y la segunda estación (VRS2) de referencia son estaciones de referencia virtuales.
3. El procedimiento según una de las reivindicaciones precedentes, que comprende adicionalmente almacenar datos que incluyen mediciones recibidas sobre señales satelitales que son válidas para la primera estación (VRS1) de referencia y datos que incluyen mediciones recibidas sobre señales satelitales que son válidas para la segunda estación (VRS1) de referencia, junto con datos que incluyen mediciones sobre señales satelitales recibidas por el receptor (320) de señales satelitales.
4. El procedimiento según una de las reivindicaciones 1 a 2, que comprende adicionalmente usar las mediciones recibidas sobre señales satelitales en un posicionamiento en tiempo real, o tiempo casi real, de un dispositivo (310) que comprende el receptor (320) de señales satelitales.
5. Un aparato (310) que comprende:
un medio (311, 312) para usar las mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para una primera estación (VRS1) de referencia y datos proporcionados por un receptor de señales satelitales, para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia y para rastrear la línea base entre el receptor (320) de señales satelitales y la primera estación (VRS1) de referencia;
un medio (311, 312) para usar mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para una primera estación (VRS1) de referencia y mediciones de fase portadora y / o fase de código sobre señales satelitales que son válidas para una segunda estación (VRS2) de referencia, que han sido recibidas en paralelo durante un tiempo limitado, y datos proporcionados por el receptor (320) de señales satelitales para resolver ambigüedades enteras para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia; y
un medio (311, 312) para usar las mediciones recibidas de fase portadora y / o fase de código sobre señales satelitales que son válidas para la segunda estación (VRS2) de referencia, datos proporcionados por el receptor (320) de señales satelitales y las ambigüedades enteras resueltas para una línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia, para rastrear la línea base entre el receptor (320) de señales satelitales y la segunda estación (VRS2) de referencia.
6. El aparato (310) según la reivindicación 5, en el cual la primera estación (VRS1) de referencia y la segunda estación (VRS2) de referencia son estaciones de referencia virtuales.
7. El aparato (310) según una de las reivindicaciones 5 a 6, que comprende adicionalmente un medio (311, 312) para almacenar datos que incluyen mediciones recibidas sobre señales satelitales que son válidas para la primera estación (VRS1) de referencia y datos que incluyen mediciones recibidas sobre señales satelitales que son válidos para la segunda estación (VRS2) de referencia, junto con datos que incluyen mediciones sobre señales satelitales recibidas por el receptor (320) de señales satelitales.
8. El aparato (310) según una de las reivindicaciones 5 a 6, en el cual los medios (311, 312) para usar las mediciones recibidas sobre señales satelitales están configurados para usar las mediciones recibidas sobre señales satelitales en un posicionamiento en tiempo real, o tiempo casi real, de un dispositivo (310) que comprende el receptor (320) de señales satelitales.
9. El aparato (310) según una de las reivindicaciones 5 a 8, que comprende adicionalmente al menos uno entre: una interfaz (318) de usuario; un componente (317) de comunicación inalámbrica configurado para permitir una comunicación con otro dispositivo
(350); y el receptor (320) de señales satelitales.10. El aparato (310) según una de las reivindicaciones 5 a 9, en el cual el aparato (310) es un terminal de comunicación inalámbrica.
11. Un código (314) de programa de ordenador que realiza el procedimiento de una de las reivindicaciones 1 a 4 cuando es ejecutado por un procesador (311).
12. Un producto (312) de programa de ordenador en el cual un código (314) de programa según la reivindicación 11 es almacenado en un medio legible por ordenador.
13. Un sistema que comprende: un primer aparato (310) según una de las reivindicaciones 5 a 10; y un segundo aparato (350) con medios (351, 352) para proporcionar mediciones sobre señales satelitales que son válidas para una primera estación
(VRS1) de referencia, para su transmisión al primer aparato (310); medios (351, 352) para proporcionar en paralelo, durante un tiempo limitado, mediciones sobre señales satelitales que
son válidas para la primera estación (VRS1) de referencia y mediciones sobre señales satelitales que son válidas para una segunda estación (VRS2) de referencia, para su transmisión al primer aparato (310); y medios (351, 352) para proporcionar mediciones sobre señales satelitales que son válidas para la segunda estación
(VRS2) de referencia, para su transmisión al primer aparato (310).
Patentes similares o relacionadas:
Sistema y método para encontrar una ubicación utilizando señales de comunicación, del 3 de Diciembre de 2014, de Exelis Inc. (100.0%): Un método para localizar un objeto utilizando señales de GPS que comprende la etapa de recibir señales de GPS desde un transmisor de señal de GPS en un receptor […]
 Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
 PROCEDIMIENTO Y DISPOSITIVO PARA CREAR UN SISTEMA DE POSICIONAMIENTO MEDIANTE UNA RED, del 9 de Diciembre de 2010, de LOCATA CORPORATION PTY LTD: Procedimiento para la creación de una red de dispositivos con unidad de posicionamiento, en el que -cada dispositivo con unidad de posicionamiento […]
PROCEDIMIENTO Y DISPOSITIVO PARA CREAR UN SISTEMA DE POSICIONAMIENTO MEDIANTE UNA RED, del 9 de Diciembre de 2010, de LOCATA CORPORATION PTY LTD: Procedimiento para la creación de una red de dispositivos con unidad de posicionamiento, en el que -cada dispositivo con unidad de posicionamiento […]