INSTALACIÓN DE PALETIZADO.
La instalación de paletizado está dividida en:
- una zona inicial de conformado de cajas con robots de conformado encargados de confeccionar cajas de cartón y posteriormente ubicarlas en la zona media de recogida,
- una zona media de recogida con la cinta transportadora por la que circulan los paquetes, un sistema de visión artificial, robots encargados de recoger los paquetes y las cajas donde los robots introducen los paquetes,
- una zona final de paletizado con robots para el paletizado y la retirada de mercancía, donde se ubican los palés completos para ser retirados de la instalación,
estando toda la instalación gobernada por un autómata que envía instrucciones a los diferentes robots.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330852.
Solicitante: DALPHOSGESTIÓN HISPANIA, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALADO SERRANO,Santiago, URUEÑA GUTIÉRREZ,Roberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Máquinas caracterizadas por la incorporación de medios para fabricar los receptáculos o recipientes (fabricación de receptáculos o recipientes con un fin diferente de la presente aplicación, ver las subclases apropiadas).
- B65B5/10 B65B 5/00 […] › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
- B65G61/00 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
Fragmento de la descripción:
Instalación de paletizado
OBJETO DE LA INVENCIÓN
La presente invención se refiere a una instalación de paletizado, cuya configuración y diseño le otorgan una flexibilidad que le habilitan para adaptarse a cualquier tipo de producto o paquete a paletizar, así como a cualquier variedad en cuanto a tipología y dimensiones de cajas empleadas.
PROBLEMA TÉCNICO A RESOLVER Y ANTECEDENTES DE LA INVENCIÓN
Actualmente, cuando se desea paletizar un paquete, se diseña una instalación de paletizado en función tanto del paquete como de la caja donde va a ser embalado.
El problema radica en que dichas instalaciones de paletizado son diseños muy rígidos, es decir, si se varía el paquete o la caja donde se va a introducir dicho paquete, la instalación de paletizado ya no sirve, siendo necesario modificar la misma con el consiguiente coste económico.
Asimismo, otro problema existente, radica en la tipología de cajas que actualmente se están empleando en el paletizado de paquetes.
Hasta ahora, la caja más habitual era la clásica caja de cartón con solapas de cierre superiores , la cual está diseñada para ser manejada ergonómicamente por una persona.
En las instalaciones de paletizado actuales, la introducción del paquete en dichas cajas se realiza de un modo manual.
Por necesidades de las grandes superficies comerciales y por su rápida sustitución, las cajas se han visto modificadas, empleando cajas de plástico, , cajas de plástico con acceso inferior para la horquilla de una transpaleta, y cajas de cartón sin solapas de cierre superiores.
Algunas de estas cajas tienen un formato de gran volumen y por lo tanto mucho peso, con lo que penalizan mucho ergonómicamente los puestos de trabajo, tanto en esfuerzo como en postura, así como al personal que es necesario para el proceso de paletizado.
La presente invención describe una instalación de paletizado de paquetes o productos automatizada en su totalidad, desde que comienzan a llegar los productos hasta que salen los palés completos. La instalación no depende del tipo de producto o paquete a paletizar. Tampoco depende del tipo de cajas en las que se embalen los productos o paquetes ni de sus dimensiones o conformado. Se trata por tanto de una instalación de paletizado para cualquier tipo de cajas y cualquier tipo de producto.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención describe una instalación de paletizado formada por al menos una línea de alimentación por la que circulan productos o paquetes destinados a ser embalados en cajas, que converge en una cinta transportadora y operada por robots.
La instalación está dividida en tres zonas bien diferenciadas: una zona inicial de conformado de cajas, una zona media de recogida y una zona final de paletizado.
La zona inicial de conformado de cajas está formada por al menos un área de almacenaje de láminas de cartón, al menos un área de almacenaje de cajas de plástico, y al menos un robot de conformado encargado de recoger laminas de cartón para confeccionar cajas de cartón, y posteriormente ubicarlas en la zona media de recogida.
La zona media de recogida está formada por la cinta transportadora por la que circulan los paquetes a embalar, un sistema de visión artificial con una cámara de alta definición, al menos un robot de recogida encargado de recoger los paquetes, y las cajas donde los robots de recogida introducen los paquetes.
La zona final de paletizado está formada por un área de almacenaje de cajas cajas de plástico con acceso para la horquilla de una transpaleta, un área con palés destinados a ubicar las cajas llenas procedentes de la zona media de recogida, un área de salida en la que se ubican los palés completos para ser retirados de la instalación y las cajas de plástico con acceso para la horquilla de una transpaleta completas, y al menos un robot de retirada de mercancía que se encarga de retirar las cajas llenas de la zona media de recogida hasta enviarlas al área de salida para ser retiradas de la instalación.
Toda la instalación está gobernada por un autómata que envía instrucciones a los diferentes robots.
En la zona inicial de conformado, puede darse la situación en la que únicamente existan robots de conformado de cajas de cartón con solapas superiores que, adicionalmente, tendrían la función de recoger cajas de plástico para ubicarlas en la zona media de recogida cuando sea preciso. Estos robots también se encargan de precintar por la zona inferior las cajas de cartón con solapas superiores ya conformadas.
También puede darse la situación de que únicamente existan robots de conformado de cajas de cartón sin solapas superiores.
Y por último, puede darse la situación en la que existan ambos tipos de robots al mismo tiempo.
En la zona final de paletizado puede darse la situación de que únicamente existan robots de retirada de palés. Estos robots se encargan de retirar las cajas de plástico con acceso para la horquilla de una transpaleta, una vez llenas, de la zona media de recogida. Además, también se encargan del suministro de palés en el área de palés, de la retirada de los palés una vez completos, de la retirada de la zona media de recogida de las cajas de cartón sin solapas superiores y de su paletizado.
También puede darse la situación de que además de los robots anteriores, existan robots de retirada de cajas. Estos robots se encargan de retirar las cajas llenas de la zona media de recogida, del precintado de las cajas y del paletizado de las cajas.
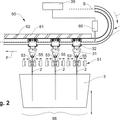
La cámara de alta definición del sistema de visión artificial está ubicada sobre la cinta transportadora y toma imágenes a alta frecuencia de la cinta transportadora para enviarlas al autómata junto con la información sobre el instante t0 en el que se ha tomado cada imagen y la cota de la cinta en la imagen, creando el autómata un registro por cada imagen recibida y guardando la información recibida en dicho registro.
Después de haber sido enviada la información al autómata, la cámara posteriormente procesa las imágenes, y selecciona imágenes como válidas si aparece un paquete cuyas dimensiones se pueden contrastar con unas dimensiones predefinidas, enviando esta información al autómata para que seleccione como válido el registro correspondiente a dicha imagen.
En la instalación existe también un encoder para el establecimiento de la posición del paquete en todo momento, que está conectado al autómata.
Al recibir el autómata la confirmación de una imagen válida por parte de la cámara y, tras analizar la información sobre la posición relativa del paquete en la cinta transportadora, la cota y el instante t0 en que se tomó la imagen, mediante el encoder se obtienen la información sobre la posición del paquete y el instante en que un robot de recogida previamente seleccionado según su disponibilidad recogerá y embalará el paquete en una posición programada.
A continuación se describe como se efectúa la retirada y reposición de cajas de la zona media de recogida hasta el área de salida de la instalación.
Las cajas de cartón con solapas superiores y las cajas de plástico son retiradas por un robot de retirada de cajas una vez están llenas y paletizadas en el área de palés. Una vez el palé está completo, un robot de retirada de palés la retira y la lleva al área de salida para ser retirada de la instalación.
Las cajas de plástico con acceso para la horquilla de una transpaleta y las cajas de cartón sin solapas superiores son retiradas por un robot de retirada de palés. Las primeras son retiradas directamente al área de salida para ser retiradas de la instalación. Las segundas son paletizadas en medios palés que, una vez completos, son retirados por un robot de retirada de palés al área de salida para ser retirado de la instalación.
La reposición de nuevas cajas de cartón con solapas superiores y cajas de plástico las realiza un robot de conformado de cajas de cartón con solapas superiores de la zona inicial de conformado.
La reposición de nuevas cajas de cartón sin solapas superiores las realiza un robot de conformado de cajas de cartón sin solapas superiores de la zona inicial de conformado.
BREVE DESCRIPCIÓN DE LAS FIGURAS
Para completar la invención que se está describiendo y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización de la misma, se acompaña un conjunto de dibujos en donde, con carácter ilustrativo y no limitativo, se han representado las siguientes figuras:
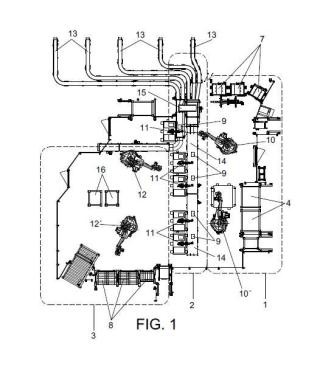
- La figura 1 representa una vista en planta...
Reivindicaciones:
1. Instalación de paletizado formada por al menos una línea de alimentación (13) por la que circulan productos o paquetes (9) destinados a ser embalados en cajas, que converge en una cinta transportadora (14) y operada por robots, caracterizada por estar la instalación dividida en tres zonas bien diferenciadas, una zona inicial de conformado de cajas (1) , una zona media de recogida (2) y una zona final de paletizado (3) , en las que:
-la zona inicial de conformado de cajas (1) comprende:
- al menos un área de almacenaje de láminas de cartón (4) ,
- al menos un área de almacenaje de cajas de plástico (7) , y
- al menos un robot de conformado (10, 10’) encargado de recoger laminas de cartón (4) para confeccionar cajas de cartón (5, 6) , y posteriormente ubicarlas en la zona media de recogida (2) ,
-la zona media de recogida (2) comprende:
- la cinta transportadora (14) por la que circulan los paquetes (9) a embalar,
- un sistema de visión artificial con una cámara (15) de alta definición,
- al menos un robot de recogida (11) encargado de recoger los paquetes (9) , y
- las cajas (5, 6, 7, 8) donde los robots de recogida (11) introducen los paquetes (9) ,
-la zona final de paletizado (3) comprende:
- un área de almacenaje de cajas de plástico con acceso para la horquilla de una transpaleta (8) ,
- un área con palés (16) destinados a ubicar las cajas (5, 6, 7) llenas procedentes de la zona media de recogida (2) ,
- un área de salida en la que se ubican los palés (16) completos para ser retirados de la instalación y las cajas de plástico con acceso para la horquilla de una transpaleta (8) completas, y
- al menos un robot de retirada de mercancía (12, 12’) que se encarga de retirar las cajas (5, 6, 7, 8) llenas de la zona media de recogida (2) hasta enviarlas al área de salida para ser retiradas de la instalación,
estando toda la instalación gobernada por un autómata que envía instrucciones a los diferentes robots (10, 10’, 11, 12, 12’) .
2. Instalación de paletizado según la reivindicación 1, caracterizada por que al menos un robot de conformado (10, 10’) es un robot de conformado de cajas de cartón con solapas superiores (10) y, adicionalmente, recoge cajas de plástico (7) y las ubica en la zona media de recogida (2) cuando sea preciso.
3. Instalación de paletizado según las reivindicaciones 1 ó 2, caracterizada por que al menos un robot de conformado (10, 10’) es un robot de conformado de cajas de cartón sin solapas superiores (10’) .
4. Instalación de paletizado según cualquiera de las reivindicaciones anteriores, caracterizada por que al menos un robot de retirada de mercancía (12, 12’) es un robot de retirada de palés (12’) que se encarga de introducir las cajas de plástico con acceso para la horquilla de una transpaleta (8) y retirar las llenas de la zona media de recogida (2) y, adicionalmente, se encarga del suministro de palés (16) en el área de palés, de la retirada de los palés (16) una vez completos, de la retirada de la zona media de recogida (2) de las cajas de cartón sin solapas superiores (6) y del paletizado de dichas cajas (6) .
5. Instalación de paletizado según cualquiera de las reivindicaciones anteriores, caracterizada por que al menos un robot de retirada de mercancía (12, 12’) es un robot de retirada de cajas (12) que se encarga de retirar las cajas (5, 7) llenas de la zona media de recogida (2) , del precintado de las cajas (5) y del paletizado de las cajas (5, 7) .
6. Instalación de paletizado según la reivindicación 1, caracterizada por que la cámara (15) de alta definición del sistema de visión artificial está ubicada sobre la cinta transportadora (14) y toma imágenes a alta frecuencia de la cinta transportadora (14) y las envía al autómata junto con la información sobre el instante t0 en el que se ha tomado cada imagen y la cota de la cinta en la imagen, creando el autómata un registro por cada imagen recibida.
7. Instalación de paletizado según cualquiera de la reivindicación 6, caracterizada por que después de haber sido enviada la información al autómata, la cámara (15) posteriormente procesa las imágenes, y selecciona imágenes como válidas si aparece un paquete (9) cuyas dimensiones se pueden contrastar con unas dimensiones predefinidas, enviando esta información al autómata para que seleccione como válido el registro correspondiente a dicha imagen.
8. Instalación de paletizado según la reivindicación 7, caracterizada por que el autómata está conectado a un encoder para el establecimiento de la posición del paquete (9) en todo momento.
9. Instalación de paletizado según la reivindicación 8, caracterizada por que al determinar el autómata una imagen válida y, tras analizar la información sobre la posición relativa del paquete (9) en la cinta transportadora (14) , la cota y el instante t0 en que se tomó la imagen, mediante el encoder se obtienen la información sobre la posición del paquete (9) y el instante en que un robot de recogida (11) previamente seleccionado según su disponibilidad recogerá y embalará el paquete (9) en una posición programada.
10. Instalación de paletizado según la reivindicación 1, caracterizada por que en la zona inicial de conformado de cajas (1) los robot de conformado de cajas de cartón con solapas superiores (10) precintan por la zona inferior las cajas de cartón con solapas superiores (5) conformadas.
11. Instalación de paletizado según la reivindicación 1, caracterizada por que en la zona media de recogida (2) al llenarse una caja (5, 7) , un robot de retirada de cajas (12) retira la caja (5, 7) , la paletiza en un palé (16) ubicado en la zona de palés y un robot de conformado de cajas de cartón con solapas superiores (10) coloca una nueva caja (5, 7) en su lugar.
12. Instalación de paletizado según la reivindicación 1, caracterizada por que en la zona media de recogida (2) al llenarse una caja de cartón sin solapas superiores (6) , es retirada y paletizada por un robot de retirada de palés (12’) y un robot de conformado de cajas de cartón sin solapas superiores (10’) coloca una nueva caja de cartón sin solapas superiores (6) en su lugar.
13. Instalación de paletizado según la reivindicación 1, caracterizada por que en la zona media de recogida (2) al llenarse una caja de de plástico con acceso para la horquilla de una transpaleta (8) , un robot de retirada de palés (12’) retira la caja de plástico con acceso para la horquilla de una transpaleta (8) llevándola al área de salida para ser extraída de la instalación y coloca una nueva caja (8) en su lugar.
14. Instalación de paletizado según la reivindicación 11, caracterizada por que en la zona final de paletizado (3) un robot de retirada de palés (12’) retira el palé (16) al considerarse completo.
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Casete de medicamentos y aparato automático de empaquetado de medicamentos con el mismo, del 27 de Mayo de 2020, de JVM Co., Ltd: Un casete de medicamentos para suministrar automáticamente medicamentos de acuerdo con la información de la prescripción, comprendiendo el casete de medicamentos : un […]
MÁQUINA DE EMPAQUETADO DE TUBOS CILÍNDRICOS Y PROCESO DEEMPAQUETADO, del 11 de Marzo de 2020, de AKYUREK KARDESLER TARIM URUNLERI MAKINALARI TASIMACILIK VE MADENCILIK SANAYI TICARET LIMITED SIRKETI, SUCURSAL EN ESPAÑA: Máquina de empaquetado de tubos cilíndricos y proceso de empaquetado que se lleva a efecto con dicha máquina, destinada a introducir un conjunto de tubos […]
Máquina encajadora de monodosis, del 11 de Marzo de 2020, de IMASDE EXTREMADURA S.L: La máquina encajadora de monodosis está diseñada para realizar el encajado de envases de tipo monodosis de distintos formatos en cajas vacías […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de envasado de blíster y procedimiento de envasado de blíster, del 11 de Diciembre de 2019, de JVM Co., Ltd: Dispositivo de envasado de blíster que comprende: un bastidor ; una tolva principal unida al bastidor y configurada para recibir comprimidos; un módulo […]
Máquina empaquetadora para morriones de alambre, del 20 de Noviembre de 2019, de GEFIN, S.R.L.: Una máquina empaquetadora para morriones de alambre en contenedores que tienen formas diferentes y predeterminadas, incluyendo: - una estructura de […]
Máquina de embalar, del 20 de Noviembre de 2019, de Mad Automation SRL: Máquina de embalar que comprende: - un transportador de entrada para transportar productos para su embalaje a lo largo de una dirección de desplazamiento […]