Helicóptero de modelismo mono-rotor con comportamiento de estabilidad mejorado.
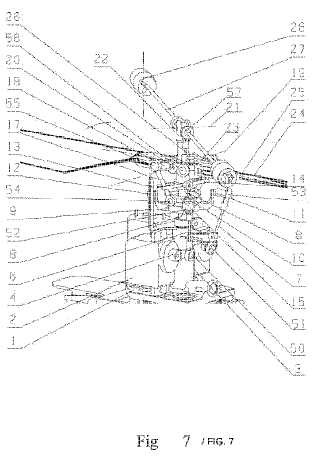
Helicóptero de modelismo mono-rotor, que comprende un husillo (8),
una pinza (23) del rotor dispuesta sobre el husillo (8), una pareja de palas (24) del rotor, dispuestas sobre la pinza (23) del rotor y una pareja de balancines (18)
de control híbrido, y que además comprende un sistema de funcionamiento y un sistema de estabilización, en el que el sistema de funcionamiento comprende:
un primer servo (2), que tiene un primer árbol propulsor adaptado para producir un momento de fuerza de accionamiento longitudinal; un segundo servo (3), que tiene un segundo árbol propulsor adaptado para producir un momento de fuerza de accionamiento transversal; y una combinación de platos oscilantes, conectada al primer servo (2) y al segundo servo (3) a través de varillas de conexión, y adaptada para convertir el momento de fuerza de accionamiento longitudinal y el momento de fuerza de accionamiento transversal en un momento de fuerza cíclico;
el sistema de estabilización comprende: una varilla (27) de estabilización conectada al husillo (8), y una pareja de paletas (28) estabilizadoras dispuestas sobre ambos extremos de la varilla (27) de estabilización; en el que una pareja de balancines (18) de control híbrido se disponen respectivamente a ambos lados de la pinza (23) del rotor, y se conectan giratoriamente a un balancín (20) de control de paso que se dispone a ambos lados de la pinza (23) del rotor a través de unos orificios axiales respectivos; cada balancín (18) de control híbrido tiene dos puntos de control, en el que a un primer par de puntos de control diagonalmente opuestos el uno al otro, en la pareja de balancines (18) de control híbrido, los controla el momento de fuerza cíclico que se transmite desde la combinación de platos oscilantes, a un segundo par de puntos de control diagonalmente opuestos el uno al otro lo controla el sistema de estabilización, y el segundo par de puntos de control que controla el sistema de estabilización y el primer par de puntos de control que controla la combinación de platos oscilantes, se mueven el uno con respecto al otro como puntos de apoyo mutuos; una línea axial longitudinal mecánica del helicóptero de modelismo se encuentra en una posición en la que hay un ángulo inferior a 90º entre la línea axial longitudinal mecánica y el eje longitudinal, en sentido contrario al giro de las palas del rotor del eje longitudinal del helicóptero de modelismo, y una línea axial transversal mecánica se encuentra en una posición donde hay un ángulo inferior a 90º entre la línea axial transversal mecánica y el eje transversal, en sentido contrario al giro de las palas del rotor del eje transversal del helicóptero de modelismo; y la línea axial de la varilla (27) de estabilización se encuentra enfrente del borde anterior de las palas (24) del rotor, y el ángulo horizontal entre la línea axial de la varilla (27) de estabilización y la línea axial de las palas (24) del rotor se encuentra entre 25º y 65º.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2008/071129.
Solicitante: SHANGHAI NINE EAGLES ELECTRONIC TECHNOLOGY CO., LTD.
Nacionalidad solicitante: China.
Dirección: NO.5 LANE 28 YULU ROAD JIADING DISTRICT SHANGHAI 201801 CHINA.
Inventor/es: HUANG,Guochuan, WU,Yuchen, YU,Yizhen, DING,Huanzhong.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63H27/133 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63H JUGUETES, p. ej. TROMPOS, MUÑECOS, AROS O JUEGOS DE CONSTRUCCION. › A63H 27/00 Aviones; Otros juguetes voladores (juguetes con paracaídas A63H 33/20). › Helicópteros; Autogiros (A63H 27/04 tiene prioridad).
- B64C27/625 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 27/00 Giroaviones; Sus rotores específicos (dispositivos de aterrizaje B64C 25/00). › que incluyen masas rotativas o servo-rotores.
PDF original: ES-2382760_T3.pdf
Fragmento de la descripción:
Helicóptero de modelismo mono-rotor con comportamiento de estabilidad mejorado
5 Campo de la tecnología
La presente invención se refiere a un helicóptero de modelismo mono-rotor por control remoto.
Antecedentes
La base técnica de un helicóptero de modelismo mono-rotor por control remoto es consistente con la de un helicóptero real, pero sus estructuras son claramente diferentes. En la actualidad, entre los sistemas de control de un helicóptero se incluyen el sistema Bell, el sistema Hiller y el sistema mixto Bell-Hiller.
El sistema Bell se usa sobre todo en helicópteros reales, y una característica típica del sistema es que el ángulo de las palas del rotor se controla directamente, no se usa una pala estabilizadora, y el borde anterior de las palas del rotor están lastradas. La mayoría de los helicópteros modernos ni siquiera tienen lastre, en su lugar las palas del rotor realizan un movimiento ondulado. Durante el vuelo, cuando el helicóptero se encuentra con la interferencia de una corriente de aire inestable, no se transmite el cambio en la carga aerodinámica al cuerpo del helicóptero, de manera que el helicóptero pueda volar con estabilidad. El helicóptero con el sistema Bell se caracteriza por que el control de la acción es relativamente directo, de forma que sea sensible a pequeños movimientos, pero no pueden realizarse vuelos con maniobras pronunciadas. Por lo tanto, este sistema no puede cumplir los requisitos específicos de maniobrabilidad de los helicópteros de modelismo acrobático más comunes, es decir, alta sensibilidad, acciones difíciles, y operaciones muy bruscas.
Las características del sistema Hiller son opuestas a las del sistema Bell, un helicóptero con sistema de control Hiller R/C tiene un par de barras de estabilización Hiller. Las barras Hiller sirven principalmente como medio entre los servos y palas del rotor principal. En funcionamiento, a las barras Hiller las propulsan los servos, y luego las palas del rotor principal se propulsan a través de la fuerza aerodinámica de las barras Hiller. El helicóptero de sistema Hiller es adecuado para vuelos con maniobras abruptas, y se aplica sobre todo a helicópteros R/C. Sin embargo, es difícil para los modelos puramente Hiller alcanzar suficiente estabilidad.
En la actualidad, el sistema mixto se usa extensamente en helicópteros de modelismo. El procedimiento del sistema de funcionamiento "Bell-Hiller" se describe a continuación. De acuerdo con una instrucción de un receptor 35 electrónico, de un dispositivo de radio control remoto, un servo controla a través de una varilla de conexión un plato oscilante no giratorio para que se incline en una dirección específica. Se impulsa un plato oscilante giratorio mediante una horquilla de desplazamiento para que gire de forma sincronizada con un husillo sobre la superficie inclinada del plato oscilante no giratorio. Durante el procedimiento, el servo transmite un momento de fuerza que se convierte en un momento de fuerza cíclico. En cada ciclo de giro, el plato oscilante giratorio tira de un balancín de 40 control de paso de las barras Hiller a través de las varillas de conexión, a fin de controlar cíclicamente el ángulo de ataque de las barras "Hiller" para que aumente o disminuya, de tal forma que las barras hiller giradas suban o bajen cíclicamente. Además las varillas de conexión tiran del balancín de control de paso de las palas del rotor, que gira de forma sincronizada, para que cambie el ángulo de ataque, y la fuerza de sustentación de las palas giratorias del rotor se aumenta o disminuye cíclicamente, de manera que el disco del rotor de las palas del rotor se incline en una 45 dirección especifica según las instrucción recibida, y el momento de fuerza longitudinal y el momento de fuerza transversal resultante del disco del rotor inclinado de la pala del rotor permita al helicóptero de modelismo que se está manejando, moverse en la dirección indicada.
Las características del sistema de funcionamiento del sistema "Bell-Hiller" se describen a continuación. El momento 50 de fuerza de accionamiento del servo se transmite a las palas del rotor a través de la fuerza aerodinámica de las barras "Hiller" que sirven como intermediarias, aunque el procedimiento no sea enteramente una transmisión mecánica, de forma que el sistema satisface las necesidades para las difíciles maniobras de habilidad del helicóptero de aeromodelismo mono-rotor con grandes maniobras más bruscas. La paleta estabilizadora y las barras Hiller del sistema "Bell-Hiller" son una combinación integral, y la línea axial de las barras Hiller de las mayoría de los 55 helicópteros de aeromodelismo con este sistema es perpendicular a la línea axial de las palas del rotor. Debido al efecto giroscópico que se genera cuando las barras Hiller giran, el helicóptero de modelismo puede superar las interferencias externas que encuentre, estabilizando ligeramente de este modo el helicóptero de modelismo, y permitiendo al modelo superar la interferencia externa automáticamente. Sin embargo, las barras Hiller que giran a cierta velocidad tienen una función amortiguadora sobre la función automática de estabilización. Debido a los límites 60 de la estructura, la función estabilizadora de las barras Hiller se debilita. Las características anteriores tienen como resultado en cuanto a estabilidad un comportamiento pobre del helicóptero de modelismo mono-rotor con este sistema, y las técnicas para ponerlo en funcionamiento resultan complicadas. A fin de dominar completamente las técnicas de funcionamiento, es preciso un instructor para el aprendizaje y es necesario practicar mucho durante un largo periodo de tiempo para dominar las técnicas. El alto umbral técnico limita en gran medida el modelo.
65 En la industria se busca modificar el sistema de helicóptero "Bell-Hiller", a fin de mejorar el comportamiento de estabilidad y disminuir la complejidad y dificultad de las técnicas de funcionamiento. Sin embargo, la función automática de estabilización de la paleta estabilizadora y la función auxiliar de funcionamiento de las barras Hiller son dos cuestiones técnicas diferentes, que, sin embargo, están integradas como un todo en el sistema Bell-Hiller.
Por lo tanto, una estructura concebida de acuerdo con dicho sistema no puede tener suficiente libertad de diseño entre maniobrabilidad y estabilidad.
A pesar de los límites anteriores, en el campo de los helicópteros de modelismo, la aplicación del sistema "Bell-Hiller" en los helicópteros de radio control remoto de cuatro canales o en los modelos de más nivel se ha convertido en un sistema habitual. En otro modelo de helicóptero coaxial de rotor de palas dual que puede dominarse fácilmente, la dirección de giro de las palas del rotor superior e inferior son opuestas, de manera que cuando el helicóptero de modelismo se pone en funcionamiento para que se desplace, el rendimiento aerodinámico de las palas del rotor es muy diferente al del helicóptero de modelismo mono-rotor, y en la misma medida, el sistema de funcionamiento y el sistema de estabilización tienen las siguientes características distintivas. Una paleta estabilizadora controla las palas del rotor superior para lograr un buen comportamiento de estabilidad del helicóptero, y el sistema de funcionamiento controla las palas del rotor inferior para aplicar los momentos de fuerza longitudinal y transversal del helicóptero.
Por lo tanto, en el pasado, cuando aprendían a manejar el helicóptero de aeromodelismo mono-rotor, los amantes del aeromodelismo sólo podían elegir el helicóptero de modelismo mono-rotor con el sistema "Bell-Hiller", el cual resulta difícil de dominar. En la actualidad, las características del helicóptero de modelismo mono-rotor con el sistema "Bell-Hiller" que resulta adecuado para grandes maniobras bruscas y tiene un funcionamiento sensible se han convertido en un obstáculo. Las técnicas de funcionamiento del sistema son complicadas, y el comportamiento del helicóptero de modelismo en cuanto a estabilidad es pobre, así que mucha gente ni siquiera logra dominar la técnica de vuelo estacionario, el modo de vuelo básico del helicóptero con el sistema "Bell-Hiller", por no mencionar las maniobras de habilidad de elevada dificultad y que requieren grandes maniobras bruscas. Por lo tanto, es necesario romper con el sistema habitual, y desarrollar un modelo de helicóptero con un solo rotor que pueda volar fácilmente y se pueda manejar con mayor facilidad.
La patente europea Nº 2172396A1 describe un helicóptero de R/C del tipo de un solo rotor configurado para que tenga un tamaño reducido... [Seguir leyendo]
Reivindicaciones:
1. Helicóptero de modelismo mono-rotor, que comprende un husillo (8) , una pinza (23) del rotor dispuesta sobre el husillo (8) , una pareja de palas (24) del rotor, dispuestas sobre la pinza (23) del rotor y una pareja de balancines (18)
de control híbrido, y que además comprende un sistema de funcionamiento y un sistema de estabilización, en el que el sistema de funcionamiento comprende:
un primer servo (2) , que tiene un primer árbol propulsor adaptado para producir un momento de fuerza de accionamiento longitudinal; un segundo servo (3) , que tiene un segundo árbol propulsor adaptado para producir un momento de fuerza de accionamiento transversal; y una combinación de platos oscilantes, conectada al primer servo (2) y al segundo servo (3) a través de varillas de conexión, y adaptada para convertir el momento de fuerza de accionamiento longitudinal y el momento de fuerza de accionamiento transversal en un momento de fuerza cíclico;
el sistema de estabilización comprende: una varilla (27) de estabilización conectada al husillo (8) , y una pareja de paletas (28) estabilizadoras dispuestas sobre ambos extremos de la varilla (27) de estabilización; en el que una pareja de balancines (18) de control híbrido se disponen respectivamente a ambos lados de la pinza (23) del rotor, y se conectan giratoriamente a un balancín (20) de control de paso que se dispone a ambos lados de la pinza (23) del rotor a través de unos orificios axiales respectivos; cada balancín (18) de control híbrido tiene dos puntos de control, en el que a un primer par de puntos de control diagonalmente opuestos el uno al otro, en la pareja de balancines (18) de control híbrido, los controla el momento de fuerza cíclico que se transmite desde la combinación de platos oscilantes, a un segundo par de puntos de control diagonalmente opuestos el uno al otro lo controla el sistema de estabilización, y el segundo par de puntos de control que controla el sistema de estabilización y el primer par de puntos de control que controla la combinación de platos oscilantes, se mueven el uno con respecto al otro como puntos de apoyo mutuos; una línea axial longitudinal mecánica del helicóptero de modelismo se encuentra en una posición en la que hay un ángulo inferior a 90º entre la línea axial longitudinal mecánica y el eje longitudinal, en sentido contrario al giro de las palas del rotor del eje longitudinal del helicóptero de modelismo, y una línea axial transversal mecánica se encuentra en una posición donde hay un ángulo inferior a 90º entre la línea axial transversal mecánica y el eje transversal, en sentido contrario al giro de las palas del rotor del eje transversal del helicóptero de modelismo; y la línea axial de la varilla (27) de estabilización se encuentra enfrente del borde anterior de las palas (24) del rotor, y el ángulo horizontal entre la línea axial de la varilla (27) de estabilización y la línea axial de las palas (24) del rotor se encuentra entre 25º y 65º.
2. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que de entre los tres pares de puntos de conexión, incluyendo el par de puntos de conexión de los orificios axiales de los balancines (18) de control híbrido y el balancín (20) de control de paso, el primer par de puntos de control, y el segundo par de puntos de control, al menos dos de los pares de puntos de conexión son pares de junta articulada universal.
3. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que la línea axial longitudinal mecánica es perpendicular a la línea axial transversal mecánica.
4. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que una línea axial longitudinal
45 mecánica de referencia, del helicóptero, se sitúa en una posición de 45º en sentido contrario al giro de las palas del rotor del eje longitudinal del helicóptero, y una línea axial transversal mecánica de referencia, del helicóptero, se sitúa en una posición de 45º, en sentido contrario al giro de las palas del rotor del eje transversal del helicóptero.
5. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que la combinación de platos oscilantes comprende un plato (9) oscilante no giratorio y un plato (15) oscilante giratorio dispuestos sobre el husillo (8) del helicóptero, y en el que el plato (9) oscilante no giratorio tiene un primer balancín y un segundo balancín, el primer balancín se conecta al primer árbol propulsor a través de una primera varilla (6) de conexión inferior para transmitir el momento de fuerza de accionamiento longitudinal, el segundo balancín se conecta al segundo árbol propulsor a través de una segunda varilla (7) de conexión inferior para transmitir el momento de fuerza de 55 accionamiento transversal, el plato (15) oscilante giratorio tiene un par de terceros balancines que se disponen simétricamente usando el husillo (8) como centro, y los dos terceros balancines se conectan respectivamente al primer par de puntos de control del par de balancines (18) de control híbrido a través de las dos varillas de conexión intermedias.
6. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 5, en el que el plato (9) oscilante no giratorio además comprende un brazo de orientación limitado para moverse arriba y abajo en una rampa de deslizamiento vertical.
7. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que un par de puntos de junta
65 articulada universal se disponen sobre la varilla (27) de estabilización, y el par de puntos de junta articulada universal se conectan al segundo par de puntos de control de los balancines (18) de control híbrido a través de un par de varillas (26) de conexión superiores.
8. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que la varilla (27) de estabilización se conecta al extremo superior del husillo (8) , y se sitúa encima de la pinza (23) del rotor. 5
9. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que la varilla (27) de estabilización se sitúa sobre el husillo (8) debajo de la pinza (23) del rotor.
10. El helicóptero de modelismo mono-rotor de acuerdo con la reivindicación 1, en el que la línea axial longitudinal
mecánica del helicóptero de modelismo está dentro de un intervalo de 70º a 20º, en sentido contrario al giro de las palas del rotor del eje longitudinal del helicóptero de modelismo, y la línea axial transversal mecánica del helicóptero está dentro del intervalo de 70º a 20º, en sentido contrario al giro de las palas del rotor del eje transversal del helicóptero de modelismo.
Patentes similares o relacionadas:
"HELICOPTERO NO TRIPULADO CON CARCASA AUTOPORTANTE"., del 16 de Junio de 2007, de SCHIEBEL INDUSTRIES AG: Helicóptero no tripulado con un motor de combustión interna y un depósito de combustible asociado, caracterizado porque la unidad compuesta por motor de combustión […]
MECANISMO DE CONTROL DE LA CABEZADA DEL ROTOR DE UN MODELO DE HELICOPTERO., del 1 de Mayo de 2006, de KYOSHO CORPORATION: Mecanismo de control de cabezada de un rotor de un modelo en miniatura de helicóptero que comprende Un plato oscilante superior ; un […]
HELICOPTERO MODELO REDUCIDO., del 16 de Marzo de 2003, de STREICH, ULI: La invención consiste en un helicóptero a escala reducida compuesto por un cuerpo conteniendo un motor conectado a un rotor por medio de un árbol […]
HELICOPTERO DE JUGUETE., del 16 de Abril de 2001, de RODRIGUEZ MARTINEZ, S.C.: 1. Helicóptero de juguete, caracterizado esencialmente porque comprende un conjunto de piezas de material plástico que se montan entre sí por medio de tornillos, […]
GIRAVION CON ESTABILIZACION GIROSCOPICA DEL ROTOR., del , de ZIEGLER, BRUNO: SE PROPONE UN HELICOPTERO CON ALETAS SOPORTE SUJETADAS EN UNA PIEZA CENTRAL DE UN CABEZAL DE ROTOR GIRATORIO, QUE FORMA EL ROTOR Y SU ANGULO ES AJUSTABLE […]
HELICOPTERO DE JUGUETE., del 1 de Mayo de 1996, de INOVAC-RIMA, S.A.: HELICOPTERO DE JUGUETE, CARACTERIZADO PORQUE ESTA CONSTITUIDO POR DOS SEMICARCASAS LONGITUDINALES SIMETRICAS, LAS CUALES DISPONEN EN SUS BORDES ENFRENTABLES […]
JUGUETE VOLADOR., del 16 de Agosto de 1994, de FLAPS COMERCIAL, S.L.: JUGUETE VOLADOR, CARACTERIZADO ESENCIALMENTE POR ESTAR CONSTITUIDO POR UNA PIEZA DE ESTRUCTURA APLANADA QUE SIMULA EL FUSELAJE DE UN AUTOGIRO […]
OBJETO VOLADOR CON ROTORES EN TÁNDEM, del 27 de Febrero de 2012, de SILVERLIT TOYS MANUFACTORY, LTD: Objeto volador con rotores en tándem.Un objeto volador con rotores tándem, en particular, un helicóptero, presenta un rotor principal y un rotor en tándem, cada uno con palas […]