DISPOSITIVO LIDAR AEROTRANSPORTADO.
Dispositivo lidar aerotransportado, caracterizado por la integración de un sistema global de posicionamiento preciso por satélite (Figura 4),
un sistema de navegación inercial, un emisor-receptor láser (Figura 1) y una cámara fotográfica (Figura 3). El GPS (figura 4), registra la posición y la hora exacta, mientras que la UET (Figura 5) toma del sensor inercial los datos de cualquier movimiento y los deja registrados. El láser registra ángulo y distancia de cada pulso y la cámara fotográfica (Figura 3) toma imágenes verticales a intervalos planificados.Mediante cálculo posterior se obtienen los parámetros de orientación externa y la georreferenciación de los datos. La información obtenida se procesa en un ordenador para obtener los resultados deseados
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201100099.
Solicitante: AEROLASER SYSTEM SL.
Nacionalidad solicitante: España.
Provincia: LAS PALMAS.
Inventor/es: HERRERA AZORIN,TOMAS.
Fecha de Solicitud: 20 de Enero de 2011.
Fecha de Publicación: .
Fecha de Concesión: 3 de Octubre de 2011.
Clasificación PCT:
- G01C11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica.
Fragmento de la descripción:
Dispositivo lidar aerotransportado.
Objeto de la invención
El presente dispositivo consiste en un sensor aerotransportado, de tamaño muy reducido, que permite la navegación inercial y la toma de fotografías aéreas y puntos láser por barrido. Los resultados que se obtienen a través de este dispositivo son varios: cartografía vectorial de restitución, ortofotos de alta resolución, modelo digital del terreno (MDT en adelante) y modelo digital de superficies (MDS en adelante). Gracias a sus reducidas dimensiones y peso, es posible transportar y adaptar el dispositivo con facilidad a cualquier medio de transporte aéreo.
El dispositivo objeto de la invención está compuesto por varios equipos de diferentes fabricantes, sin embargo, la integración de estos es parte de un proyecto I + D desarrollado por AEROLASER SYSTEM S.L.
Antecedentes de la invención
Según libro "FOTOGRAMETRÍA MODERNA: ANALÍTICA Y DIGITAL" de José Luis Lerma García1
Una de las técnicas para la realización de fotogrametría aérea es la aerotriangulación GPS/INS, esta, permite reducir en gran medida los puntos de apoyo necesarios para aerotriangular una zona. El objeto de incluir un GPS y una unidad IMU en un medio de transporte aéreo, es obtener puntos de apoyo aéreos, la orientación externa y la georreferenciación de los sensores en el momento del disparo. La precisión de esta técnica es inferior al decímetro.
En el mercado actual existen dispositivos aerotransportados que ejecutan la técnica de la fotogrametría digital logrando excelentes resultados, sin embargo, su elevado peso y sus grandes dimensiones, son un inconveniente tanto económico como logístico a la hora de realizar toma datos en diferentes regiones. El dispositivo descrito en este documento, se diferencia de otros aparatos en que ha sido diseñado específicamente para adaptarse a una caja certificada para helicópteros, de manera que, el transporte de este no suponga los inconvenientes descritos anteriormente.
Descripción de la invención
El dispositivo Lidar Aerotransportado obtiene, tanto modelos digitales del terreno (en adelante MDT) como cartografía de una zona determinada, mediante el uso de un sistema global de posicionamiento preciso por satélite, en combinación con un sistema de navegación inercial, un emisor-receptor láser y una cámara fotográfica. De esta forma, se consigue la georreferenciación precisa de puntos láser y fotografías, con la ventaja de disminuir la cantidad de puntos de apoyo necesarios que requiere la fotogrametría aérea clásica.
Antes de comenzar con la descripción, es conveniente mencionar los elementos que conforman el dispositivo, estos son:
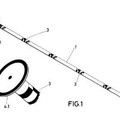
• Escáner láser Figura 1: Realiza disparos de rayos láser y calcula la distancia (con un error de
• Sensor movimiento Figura 2: medida de los giros y aceleraciones en los tres ejes de coordenadas.
• Cámara fotográfica digital Figura 3: fotografía aérea digital de alta resolución.
• GPS: posicionamiento geográfico preciso en modo diferencial.
• Unidad estampadora de tiempo (en adelante (JET): Este elemento es la interfaz entre: el sensor de movimiento, la cámara fotográfica, el GPS y el ordenador.
• Unidad de potencia y control (UPC) Figura 6: duplicador de señal PPS obtenida del GPS y alimentación de equipos.
• Ordenador: planificación y control de vuelo, almacenamiento de datos y cálculo.
• Periféricos Figura 8: uso de pantallas para el control del PC y la navegación del piloto.
• Estructura montaje de transporte: aerotransporte del dispositivo.
La integración de estos elementos permite obtener la cartografía y el MDT de una zona, para esto, se sobrevuela a una altura y velocidad preestablecida sobre la región deseada, de modo que, el dispositivo objeto de este documento, toma perfiles y fotografías de la superficie.
Durante el vuelo, un GPS registra la posición y la hora exacta 2 veces por segundo, además, la UET toma del sensor inercial los datos correspondientes al movimiento de guiñada, alabeo, cabeceo, aceleración vertical, longitudinal en el eje X y longitudinal en el eje Y del dispositivo, de modo que, cualquier movimiento de éste queda registrado. Con esto, se consiguen los parámetros de orientación externa y la georreferenciación de los datos tomados por el dispositivo. Finalmente, la información recolectada se procesa en un ordenador y se obtiene el modelo digital del terreno (MDT), junto con la cartografía vectorial de restitución, ortofotos de alta resolución y modelo digital de superficies (MDS).
Breve descripción de los dibujos
Para facilitar la comprensión de la descripción realizada en esta memoria, se adjuntan unos dibujos que representan los diferentes elementos que componen el dispositivo objeto de este escrito.
En la Figura 1, se pueden apreciar las vistas en planta inferior y perfil izquierdo del escáner láser, en las cuales se puede observar su ventana 2, sus diferentes conexiones (3, 4 y 5) y puntos de anclaje 1.
La Figura 2 muestra el sensor de movimiento así como su puerto conexión 6 en el perfil izquierdo y sus puntos de anclaje en la planta inferior 7.
La Figura 3 presenta la vista en perfil izquierdo de la cámara fotográfica digital. En ella se pueden contemplar sus terminales de conexión 8, 9 y 10.
La muestra la unidad de posicionamiento preciso (GPS diferencial, antena y libreta electrónica), donde se pueden ver las conexiones de dichos elementos (11 al 16).
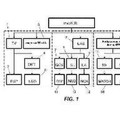
La muestra la estructura, las conexiones de la Unidad Estampadora de Tiempo (en adelante UET) (17 al 23) y puntos de anclaje 24 en la planta inferior.
En la Figura 6 se presentan las conexiones de la Unidad de Potencia y Control (en adelante UPC). Sus conexiones se encuentran en el perfil izquierdo 25, 26, en el perfil derecho 27.
La muestra el alzado del PC y en ella se pueden ver sus puertos de conexión (28 al 34).
En la Figura 8 se muestran las pantallas de visualización-control del dispositivo 35 y 36.
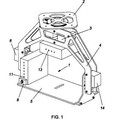
La muestra la caja certificada donde se monta el dispositivo cuando se realizan vuelos en helicóptero. Sus conexiones (37 al 42) están en la parte derecha.
La muestra la plataforma con sus agujeros de anclaje (45 al 50) donde se montan todos los elementos del dispositivo.
La Figura 11 muestra el dispositivo montado sobre la plataforma.
Descripción de la forma de montaje
El dispositivo se monta dentro de una caja certificada () para este tipo de transporte; esta caja tiene seis conectores (37, 38, 39, 40, 41 y 42) que permiten la conexión del dispositivo a la red de alimentación del helicóptero 37, alimentación del láser 38, al elemento de visualización 40 - control 39, al mando de control de la compuerta 42 y a la antena de recepción de señales GPS 41 que se instala en la cola del helicóptero que la transporta.
En la planta inferior de la caja se encuentran dos agujeros (43 y 44) que permiten la realización del barrido por parte del escáner láser Figura 1 y de fotografías por parte de la cámara Figura 3. El dispositivo alberga una compuerta electromecánica controlada desde la cabina del helicóptero que protege el interior de la caja de agentes externos.
Dentro de la caja, los elementos se fijan sobre una plancha que proporciona robustez, además de una superficie plana necesaria para la correcta nivelación del láser, el sensor de movimiento Figura 2 y la cámara. La plataforma tiene dieciocho agujeros (números del 45 al 50), los cuales seis son para el anclaje del láser 45, cuatro para el anclaje del soporte de la cámara 47, cuatro para la fijación de la plataforma en la caja 46, dos para permitir la visión directa de la zona a modelar al láser 49 y la cámara 48, dos para fijar el ordenador...
Reivindicaciones:
1. Dispositivo lidar aerotransportado, caracterizado por la integración de un sistema global de posicionamiento preciso por satélite (Figura 4), un sistema de navegación inercial, un emisor-receptor láser (Figura 1) y una cámara fotográfica (Figura 3). El GPS (figura 4), registra la posición y la hora exacta, mientras que la UET (Figura 5) toma del sensor inercial los datos de cualquier movimiento y los deja registrados. El láser registra ángulo y distancia de cada pulso y la cámara fotográfica (Figura 3) toma imágenes verticales a intervalos planificados. Mediante cálculo posterior se obtienen los parámetros de orientación externa y la georreferenciación de los datos. La información obtenida se procesa en un ordenador para obtener los resultados deseados.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA OBTENCIÓN DE UNA IMAGEN TELEDETECTADA A PARTIR DE FOTOGRAFÍA, del 18 de Diciembre de 2014, de UNIVERSIDAD DE SEVILLA: La invención consiste en un procedimiento para obtener una imagen teledetectada a partir de una fotografía, encuadrada principalmente en el sector técnico de […]
Dispositivo móvil de recogida de información, del 12 de Noviembre de 2014, de PASCO Corporation: Un aparato móvil de recogida de información, que comprende: un sistema de antena de recogida de datos de observación, que está adaptado para recibir […]
 Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
 PROCEDIMIENTO PARA LA ADQUISICIÓN Y PROCESAMIENTO DE INFORMACIÓN GEOGRÁFICA DE UN TRAYECTO, del 1 de Febrero de 2013, de GEONUMERICS, S.L: Procedimiento para la adquisición y procesamiento de información geográfica de un trayecto.
La invención propuesta se refiere a un procedimiento para la adquisición y […]
PROCEDIMIENTO PARA LA ADQUISICIÓN Y PROCESAMIENTO DE INFORMACIÓN GEOGRÁFICA DE UN TRAYECTO, del 1 de Febrero de 2013, de GEONUMERICS, S.L: Procedimiento para la adquisición y procesamiento de información geográfica de un trayecto.
La invención propuesta se refiere a un procedimiento para la adquisición y […]
Procedimiento y aparato para la estabilización de cargas útiles, incluyendo cámaras aéreas, del 3 de Octubre de 2012, de THE INSITU GROUP: Aparato aéreo de vigilancia , que comprende: una cámara que tiene una apertura de cámara configurada para recibir radiación […]
 EQUIPO DE OBTENCIÓN DE INFORMACIÓN EN OBRAS E INFRAESTRUCTURAS BASADO EN UN VEHÍCULO AÉREO NO TRIPULADO, del 30 de Agosto de 2012, de UNIVERSIDAD DE SEVILLA: Equipo de obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado, (UAV) que comprende, al menos:
(i) un vehículo aéreo no tripulado […]
EQUIPO DE OBTENCIÓN DE INFORMACIÓN EN OBRAS E INFRAESTRUCTURAS BASADO EN UN VEHÍCULO AÉREO NO TRIPULADO, del 30 de Agosto de 2012, de UNIVERSIDAD DE SEVILLA: Equipo de obtención de información en obras e infraestructuras basado en vehículo aéreo no tripulado, (UAV) que comprende, al menos:
(i) un vehículo aéreo no tripulado […]
 Aumento del sistema de localización inalámbrica comercial (WLS) con sensores móviles y/o aerotransportados para mejor exactitud de la localización y uso de imágenes aéreas en tiempo real para identificación de posiciones de dispositivos inalámbricos, del 25 de Julio de 2012, de TRUEPOSITION, INC.: Un sistema movil para uso en un sistema de localizacion inalambrica, WLS , incluyendo:
una unidad de medicion de posicion movil, […]
Aumento del sistema de localización inalámbrica comercial (WLS) con sensores móviles y/o aerotransportados para mejor exactitud de la localización y uso de imágenes aéreas en tiempo real para identificación de posiciones de dispositivos inalámbricos, del 25 de Julio de 2012, de TRUEPOSITION, INC.: Un sistema movil para uso en un sistema de localizacion inalambrica, WLS , incluyendo:
una unidad de medicion de posicion movil, […]
 PLATAFORMA PARA LA TOMA DE IMÁGENES AÉREAS, del 8 de Marzo de 2012, de UNIVERSIDAD DE SALAMANCA: Plataforma para la toma de imágenes aéreas.
Fabricada en fibra de carbono, permite la toma de imágenes aéreas a baja altura y escala grande con bajo coste. […]
PLATAFORMA PARA LA TOMA DE IMÁGENES AÉREAS, del 8 de Marzo de 2012, de UNIVERSIDAD DE SALAMANCA: Plataforma para la toma de imágenes aéreas.
Fabricada en fibra de carbono, permite la toma de imágenes aéreas a baja altura y escala grande con bajo coste. […]